- 提供配置文件
- 欢迎来到珀斯西澳大利亚大学机器人自动化实验室实验室十多年来一直积极研究各种自主移动机器人,包括智能驾驶和行人机器人、自主水下飞行器和无人驾驶飞行器并设计嵌入控制器和嵌入操作系统
产品组合
EyeBot嵌入式机器人应用控制器、数字相机、传感器、电机驱动

- EyeBot控制带轮子、行人机器人或飞机器人的移动机器人由32比特强微控制器板组成,并配有图形显示器和数字灰度或色摄像头相机直接连接机器人板允许写强机器人控制程序 无大重计算机系统 不必牺牲视觉- 最重要的传感器
特征:
- 编程实时图像处理理想基础
- 集成数字色相机
- 大图形显示器
- 自机感应器可扩展至全移动机器人
- IBM-PC或unix工作站编程
- 程序通过串行(RS-232)下载入内存或闪存
- C语言编程或汇编语言
- 第三代硬件
驾驶自主机器人、差分驱动器、EyeBot控制器、数字相机、红外线
-

夏娃
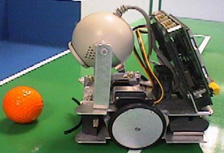
- Eve(EyeBot车)是第一个驱动机器人,我们环绕专用EyeBot控制器和QuickCam摄像系统构建机器人有EyeBatM1控制器标准顶部部分,但底板修改后匹配物理机器人轮廓后来我们放弃技术 标准控制器M3 所有机器人车辆都完全相同
Eve配有:
2D电机封装齿件和编码器
红外SD传感器
6红外近距离传感器
声波触波系统
QuickCam数字相机
-
机器人足球
- 下个驱动机器人设计 数变CIIPSGlory机器人赛队机器人必须比Eve小点 才能参赛1998年新加坡区域比赛原创CIIPSGlory播放器配有ColorQuickCam摄像头,后代由我们自己EyeCam设计替换CIIPSGlory机器人参加数场RoboCup和FIRA世界杯机器人赛事
除二大电机外,我们使用二大电站用于:
移动相机
踢球
-

机器人足球队
- 原机运动是倾斜动作 允许我们把球保留在(相对窄度)视域内 当球闭合时改用后机运动 快速跟踪移动球 无需移动全机器人 或两者并用
目标守护者变换字段播放器设计偏偏偏偏向前回移动 重置目标维护者顶部板块90度角对底板并安装大球踢板
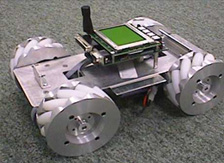
Omni双向飞行器Mecanum轮设计全向机器人EyeBot控制器
- 全方向车辆比传统车辆大有优势,用汽车类Ackermann方向盘或差分驱动器使用两轮独立电机,Eve和我们许多驾驶机器人全向驱动允许前向/后向,但也允许左转右转并当场转转这对于不得不在像工厂楼层这样的紧凑环境中操作特别有帮助
EyeBot控制器驱动四轮全向机器人Omni-1Omni2Omni3机器人使用“Mecanum轮子设计 轮圈自由滚动每一个机器人都可向任何方向驱动,即前向/后向、侧向角转转点机器人使用EyeBot控制器加载模块并增加2名驱动
-

Omni-Wheel轮椅
- 使用Omni-1使用的传统Mecanum轮和Omni-2系统创建大规模全向机器人并用作轮椅
-
Omni-1
- 传统Mecanum轮设计非悬浮表面驾驶时有缺陷,因为边缘会与表面发生接触。
-
Omni2
- 新的Mecanum轮设计并加悬浮系统 逐轮悬浮
Omni-Wheel轮椅辅助Mecanum轮全向驱动系统、传感器辅助残疾驱动系统



- 设计目标
- 半自主全向轮椅
- 脚印大小约1mx1m,有效载荷约100kg
- 线性机轮版
- 四轮独立悬停
跟踪驱动机器人用于地形导航、Eyebot控制器、姿态传感器和惯性传感器


- EyeTrack车使用轨迹移动变换模型车使用EyeBot控制器驱动飞行器并读取传感器数据机器人能从地形导航, 我们使用多向导传感器避免向上或向下过斜斜坡摄像头用三轴三维服务器以主动卡卡尼氏方式安装
EyeTrack项目之一是“智能远程控制”。机器人遥控回传图像和其他传感器数据机器人自动适应环境条件并拒绝执行可能导致机器人卡住或倒置的任何命令系统对一些援救或炸弹反爆场景非常有用
机器人足球小小队RoboCup和FIRAWorldCup比赛EyeBot控制器



- 球队自UWA移动机器人实验室中拥有自家名 取自新成功Pers Glory球队机器人核心为EyeBot控制器,由Thomas Braunl周游团队开发使用摩托罗拉6833232位控制器,提供各种数字/模拟I/O设施开发出自己的操作系统RoBIOS系统 允许大量弹性I.e.同一EyeBot系统还用于六行行机和双行机,并用框框形式用于编译语本科课程
并装数字色摄像头和图形显示图像处理全机完成机器人拥有本地智能 并非简单棋子 受中心系统指导 并具有全局视觉虽然我们的办法显然不利于赢得机械设备竞赛,但我们更感兴趣的是通用智能代理研究,而不是建立仅服务于某种竞争并依赖全球传感器的系统
机器人除数字色摄像头外,各有轴编码器和红外射程传感器并装无线传输器 允许机器人相互聊天 外加打球设备即便没有通信,我们也能操作机器人将通知每个机器人启动位置并使用轴编码器跟踪当前位置通信将允许更多复杂行为像向另一机器人传递球
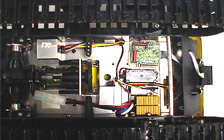
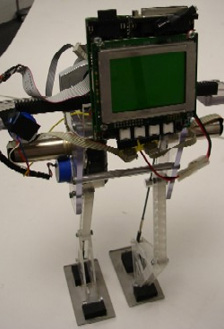
Android双机行人机器人数代使用不同的驱动器和传感器设备
- 机械和传感器电子设备是围绕EyeBot控制器单步搭建的所有机器人约50cm高并使用不同传感器控制并平衡姿态
-

Andydroid2
- Andydroid机器人由Joker机器人设计, 然而,我们已经修改 Andi1脚分三尺制为机器人主向传感器Andy总能判断每步压力中心 并因此知道零分点Andy2几乎完全相同的腿设计Andy2使用新数字servo开发代之以Andy1传统模拟servos数字服务器通过串行接口提供反馈,并因此可以双重驱动器和传感器
-

强尼沃克
- 强尼和杰克是我们设计前两个安卓机器人 使用相对廉价servos驱动器测试各种传感器机器人的一个主要问题就是机械学、电子学、电机和电池总重和电机提供相当有限的托盘双脚机器人单腿平衡有困难 难行
另一大问题就是运动可重复性机器人金属框架结构相当柔软并倾向于摇摆廉价servos使用场面相当大,无法精确重复运动再者,servo性能随servos老化而显著下降
-
石稳定
- Rock稳定化后,我们尝试了完全不同方法处理第一批机器人强尼和杰克(见左转)。机器人应使用最小数马达:一马达一腿加一马达平衡反重量精密机械结构将每条腿电机的轮廓运动转换成表达式腿运动servos使用精密DC电机编码机器人双轴内离散计用作机器人定向传感器,每个电机加增码器加外部零位光学开关
平衡驾驶机器人研究双传感器设备卡尔曼滤波
- 贝利博特实验平衡机器人 双侧轮子相似倒转阵列使用BallyBat实验平台了解传感器系统和控制系统,供人形机器人应用
其中两个实验机器人迄今已经搭建Bally1(Right)简单构造单片铝,持有控制器、传感器和2台Faulhaber带轮子电机。Bally2(左侧)设计比较紧凑,传感器相同,机机机比较高机器人正积极平衡并可用IR-Remote输入像遥控车
-
-
双脚六脚步行机器人双折双脚,各种传感器设备
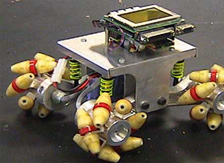
- 漫游机器人往往比驾驶机器人慢,但他们拥有近似优势,即他们横跨地形,而驾驶机器人则需要或多或少平面最简单的例子行人机器人使用六条腿,弦性允许行进法向上提升并重新定位三条腿,而其余三条腿则留在地上提供稳健平衡机器人不需要主动平衡,这是平衡和双行机器人所必备的详情见书籍“嵌入式机器人学”。
机械和传感器电子设备是围绕EyeBot控制器单步搭建的
- 12Servos驱动EyeBat
- 2红外SD传感器
-
-
SubmarinesAUV自主子机/自主水下飞行器,嵌入式控制器带惯性传感器系统
- 自主水下车辆项目
-

诚子
- AV四电机Eyebot小型PC传感器设备
-

USAL
- AUV配2电机,1控制面,Eyebot传感器设备
-

SubSim
- AUV模拟系统































