- 提供配置文件
- 我们的使命是开发科学、技术 和人力资源界面 机器人和生物运动系统
我们的目标是产生实用创新研究技术以及训练有素的研究人员精通技术和生物系统
产品组合
外科技术
- 外科技术应用先进技术最少侵入性外科培训和程序研究侧重于下列信托:外科机器人、客观评估外科性能、模拟和软组织生物机理程序
这项研究是生物扰动实验室与华盛顿大学视频内分片外科中心长期协作的一部分,由Mika SinananMD博士教科
-

乌鸦:外科机器人系统开放和最小入侵外科
- 乌鸦外科机器人是一个7DOF电缆操作器,设计用于MSS或开机外科外科机器人系统使用单双向UDP套接字远程操作乌鸦使用球形机制设计,确保MIS固定端口位置,蓝DragON系统收集的强制/托克数据使我们能够优化基于外科需求的设计廉价便携式控制站(由2PhantomOmnis组成,USB脚踏板使用,计算机数据传输使用和Skype/iChat计算机使用)方便地让我们在全球执行远程操作实验
乌鸦用于两项重要的现场实验(HAPs/MRT和NEEMO十二号实验)、一项动物实验和数项远程操作实验(包括PlugFest2009)。
-
全球保健模拟培训
- 比奥博蒂克实验室与医学院临床医生和全球卫生局专家合作创建系统培训发展中世界医疗技能首项项目是一个廉价模拟器 电解剖过程使用经验测量外科技术 并收集临床性能数据验证当前模拟器并开发新程序模拟器
-
控件系统识别
- UW生物机器人实验室持续研究项目是调查机器人辅助外科软组织压缩自动化难点在于与各种组织交互作用,这些组织属性不明,但由于消毒和尺寸约束,机器人不使用接触感应器和定位感应器解决办法是使用适应模型预测控制法估计组织交互力,允许高层次命令执行预定义工具轨迹压缩软组织控制器会考虑操作器(外科机器人)和软组织动态,以便在接触各种组织时实现可接受性能
前几项目
- 外科技术应用先进技术最少侵入性外科培训和程序研究侧重于下列信托:外科机器人、客观评估外科性能、模拟和软组织生物机理程序
这项研究是生物扰动实验室与华盛顿大学视频内分片外科中心长期协作的一部分,由Mika SinananMD博士教科
-
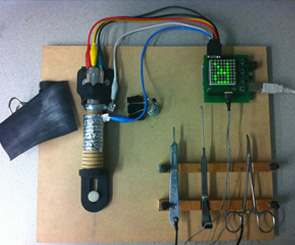
机化底镜采集器
- MEG为一度自由装置,装有强姿传感器并用DC电机启动测量软组织Vivevo和Vitro生物机性
精确生物机能特征对使用机能设备开发现实虚拟外科模拟器至关紧要外科仿真技术快速发展,但没有大型软组织机械特性数据库并存此外,测量腹软组织机械性能的大部分研究是在体外、动物和尸体上完成的。模拟技术继续能建模复杂行为,需要开发组织属性数据库以补缺近年工作用各种工具和技术解决了这个问题。
方法工具
-

德刚市
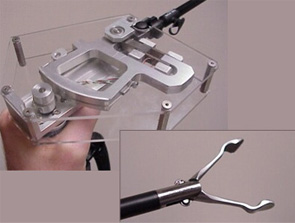
- RedragON系统测量两维镜工具的运动学和动态学,并视觉观察外科手术过程系统可分三种不同模式使用:动物模型、物理模型模拟器、虚拟现实模拟器
红龙系统跟踪两种最小侵入工具运动和外科医生应用工具时应用的所有力和奎克斯与模拟或动物模型交互作用红龙独有机制允许跨过各种培训模式,同时提供标准接口由模拟环境向现实进发(动物模型),同时提供量化信息客观评估学员技术技能红龙独有球体机制远程旋转中心使其独有能力跨版MIS培训领域
Haptic界面
- haptic设备为人提供强反馈 与虚拟或远程环境交互设备向运算符传递运动感知存在关键特征区分随机界面和被动设备是双向信息流
项目
- haptic设备为人提供强反馈 与虚拟或远程环境交互设备向运算符传递运动感知存在关键特征区分随机界面和被动设备是双向信息流
-
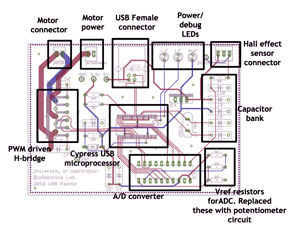
USBHaptic拼接
- Haptic Padle是斯坦福大学20世纪90年代后期由Mark Cutkosky、Jesse Dorogusker、Christopher Richard和Allison Okamura开发的低成本教机机件,它简单回填显示器既廉价又持久后由约翰霍普金斯大学改进 并终于通向华盛顿大学UW工作的目标是将电子从使用“遗留式”打印机端口的老模拟设计转换成更多模数设计,以拥有USB功能的微处理器为中心现代机机板可成为极值工具 用于机器人教学 机机机控制系统 嵌入式设计课程
-
Haptics数据归档
- 本归档的目的是分享与人和机器触控有关的数据集目标是鼓励研究人员挖掘数据集获取新结果查找上传数据集时,请点击上方菜单栏中的“上载数据”。档案馆由华盛顿大学比奥博伊特实验室托管
设备化
- haptic设备为人提供强反馈 与虚拟或远程环境交互设备向运算符传递运动感知存在关键特征区分随机界面和被动设备是双向信息流
-
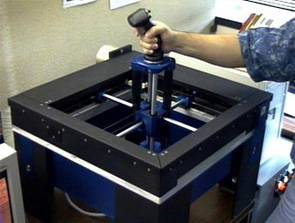
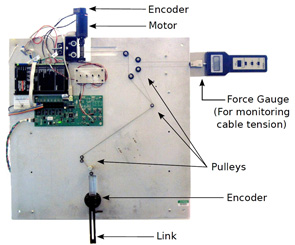
线性Haptic显示器
- 3度自由搭机设备,为最大工作空间、力输出和结构僵硬所建内装有专利钢电缆传输系统 高强度高硬度
-

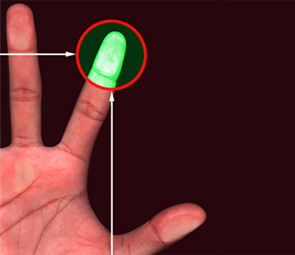
FingetipHaptic显示器
- 二度自由搭机设备,其机械设计优化供人指角工作空间使用使用该设备研究人对曲面和表面不连续性的认识
-

PendForce显示
- 直接驱动并行激活冗余3度自由机能设计以提供主从系统或虚拟模拟生成的强力反馈信息运算符使用指针或自由持有笔类工具交互











