- 提供配置文件
- 康奈尔计算合成实验室我们探索生物启发计算物理过程,允许复杂高层系统自动生成低层构件寻找新生物概念 工程新洞察生物
计算合成实验室由工程学、计算机科学、物理、数学和生物等不同学科的研究人员组成并应用于工程设计自动化 并理解自然系统复杂性的出现并搭建工作系统测试新思想仍然有许多待决问题,但如果这些过程可以理解并用上,这将是工程的未来
产品组合
VictorZykov算术合成实验室后科助理项目
-

开源模块机器人
-
- 模块机器人的吸引力在于其潜在的多功能性、强健性以及低成本制造,然而这些优势尚未实现。由于高技能水平和高成本制造和操作,模块机器人研究大都限于少数大学专业实验室
通过向更多研究者、爱好者及业余爱好者提供模块机器人,我们消除进入屏障并加速田间进度weg基础网络门户为所有感兴趣的研究人员和爱好者提供开源可扩展模块机器人系统
-

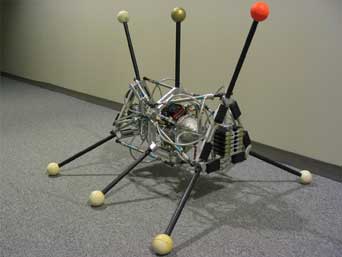
机器人自建功能损失补偿
-
- 动物通过产生质量上不同的补偿行为来维系受伤后操作能力强健性在工程系统中是可取的,但大多数机器面对意外损耗失败描述机器人自发恢复 通过连续自建四脚机使用振荡感应关系间接推介自身结构,然后使用自建模型生成前移取出段段后适应自建模型,产生替代词组概念可能有助于开发更强健机并开明动物自建
-
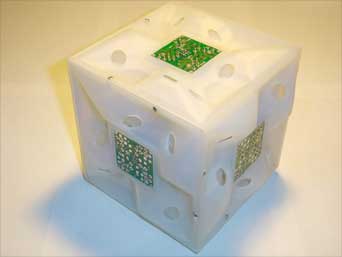
机器自复制:完全机器人重构
-
- 害怕机器接管对不起
显示数台机器从MolecubesTM建起,机器人程序化复制当然,他们可以编解码做其他事
-
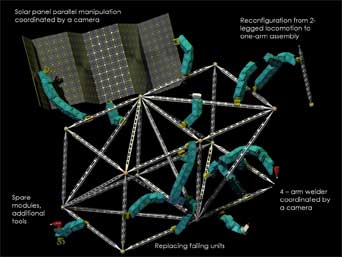
存储重配置三维:固化部件修理
-
- 这个项目由Paul White于2002年启动帮助Paul重设计二系统原型并完成最后实验
项目目标是搭建0.20.5毫米零度自由机器人运动时能以可编程和可重新配置方式相互依存计划使用此进程重构高分辨率任意3D形状
部分项目由大型原型构建实验组成Mike Tolley目前正在研究微型系统实施
-
自主控制器设计物理经验
-
- 与Hod Lipson和Josh Bongard一起项目中,我们进化运动控制器对实机-Nonaped充气并行激活机器人 12度内部非显示自由
初始目标是进化物理机器人动态步态,从现在开始实现:2硬件演化运行并进化出数位动态运动模式所有这些词组使用开路控制器
-

PhoneBot:损抗模系统
-
- 这个项目将把上述四个项目的成就合并成单一系统并用手机搭建多功能防损机器人
20年后 手机将无所不在 几乎免费内容包括语音通信能力及办公程序、调度、摄影、个人媒体娱乐、无线上网等低成本高计算能力组合将使手机成为欠发达经济中许多人唯一可负担得起的计算设备







