


为此,我们研究:
我们研究的目的是推进人机系统以及自主机器人系统的设计控制
实例应用包括:
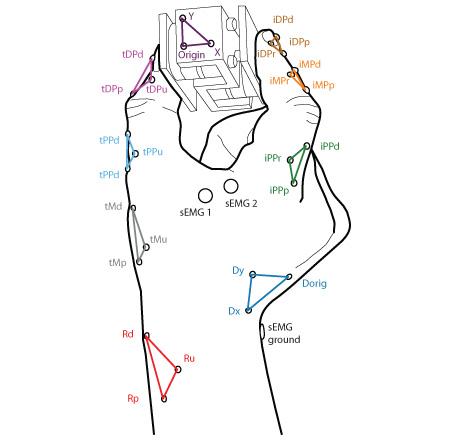
特征化人手对抓取对象旋转扰动的反射抓取响应目标是更好地了解抓取响应需要同时协调跨指对接/绑取和伸展/伸展通过深入理解人体模式化响应,我们可以开发生物启发人工反射法,增强人工机手和假手功能,不增加用户认知重负
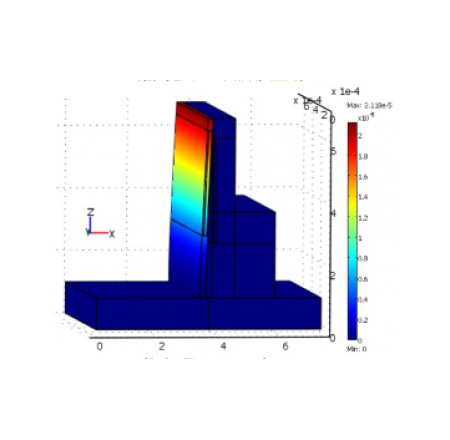
通过触摸反馈探索并操纵非结构化环境仍带来许多挑战与ASU微剪机实验室协作,我们正在开发基于电容的MEMS触摸感应皮肤,可检测正常剪切力和局部振荡使用数组配置并调高聚合多维系统在不同网站的物质属性,可同时获取各种级局部测量PDMS具有防水、化学惰性和非毒性等理想特性感应器与曲线式变形指针兼容性对性能至关重要计算机模拟开发中,原型建构中电容读数外部刺激映射将使用非线性回归模型进行,如人工神经网络
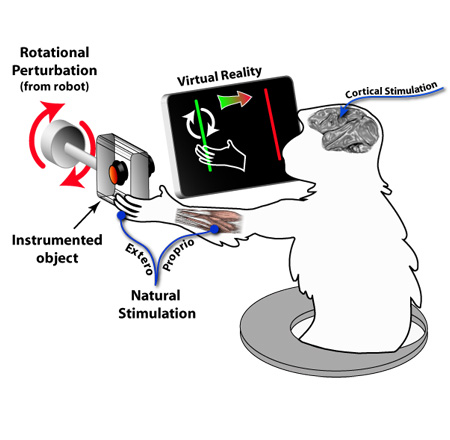
远程操作操作者人类用户缺乏对丰富触觉反馈的自觉感知,即使使用像神经假说那样与人体密切连通的设备时也是如此与ASU传感器研究组协作,我们正努力关闭人机回路感知部分使用非人灵长类和感知机器人手,我们正在映射生物感知性皮层记录与人工触摸传感器读数之间的关系最终目标是理解如何和时间刺激脑向用户提供对人工指针所发生触摸事件有意识感知

我们目前正在开发多级控制系统,在高人层次保持自发控制,但在下机层次执行自主 " 生存行为 " 处理人与机间通信延迟问题生存行为可用感官事件驱动人工反射实现,并受人抓取响应启发当前研究测试台用三指中的二指机器人手(Barrett技术)伸展能力模拟人手拇指和索引指人类形态研究测试台即将发布

数字控制特征三指抓取任务 与日常生活活动密切相关倾注任务需要协调绑定/绑定和伸展自由度成功完成动态稳定对装满流水容器重力有目的地转换和旋转是必要的