HANDLE:开发路径实现机器人自控和脱机是一个欧洲项目,由Pierre大学和MarieCurie巴黎协调,并包括一个由来自6个欧盟国家9个伙伴组成的财团:法国、英国、西班牙、葡萄牙、瑞典和德国
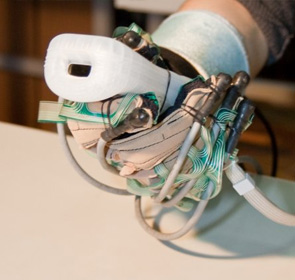
机器人领域正经历一场重大革命,因为它正越来越多地应用到生产线外的一般用途:健康、康复和专业服务、家居和休闲环境以及危险环境在那里,机器人执行精智能任务的一个基石是他们自主处理各种对象并使用人工具的能力。今日机器人无法实现敏捷操作,特别是当需要手操作时。远非能够理解和理解环境、目标和自身能力,学习技能并用教程和自身经验提高性能,以人效率与环境交互
HANDLE项目旨在理解人类如何操作物体,以便用人工手复制握术和熟练手势,并由此将机器人抓手从当前最佳做法移向自主性更高、自然有效直达手项目不仅指技术开发,还指基础多科研究方面,使机器人手系统拥有高级感知能力、高层次反馈控件和情报元素,从而能识别对象和上下文、行为推理和高度从执行交错任务失败恢复
整合神经科学、开发心理学、认知科学、机器人学、多模式感知和机器学习等学科发现后,我们开发的方法基础是原创学习和预测仿真和博学行为混合法,使机器人能够应对知识空白



项目由来自IDMEC/IST、ISR/Coimbra和Minho大学的一组研究人员组成
项目的全球目标是设计基于小飞行器的解决方案,作为半自主监控任务空中稳定平台
航空机器人领域是一个项目,近代人们越来越感兴趣,应用目标大相径庭,即民用领域,用于监测道路、检测林火、检查电线航班解决方案的长处中,我们可以举其自然稳定、低运算成本、减少污染和低空飞动甚至悬停能力为例
长时间没有飞行船导致对飞行机潜在用法和飞行特征了解度较低项目的第一个目标是使人们能够更清楚地描述飞行特征并基于最新控制技术提出替代解决办法,结果搭建半自主监测平台,并具有适当的机动性和稳定性特征。项目涉及空气动力学领域和建模控制领域,并涉及系统整合领域,包括任务安全相关方面
第二项目标已被提及为应用任务,即探索飞行器运动开发基于图像的监视系统,监控并识别物体运动,允许参照从低/中高度从飞行器摄像头提取数字地图对地面进行检查。
下表为一套架构规格和概念,分机和地面控制类别
ARSIP
GROUND控制








BACS目标
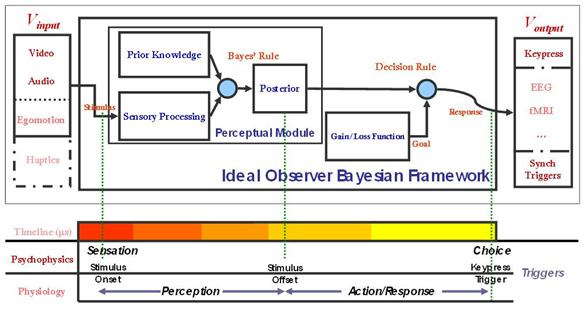
贝叶斯方法将用于开发人工认知系统
BACS-贝叶斯认知系统综合项目
主目标
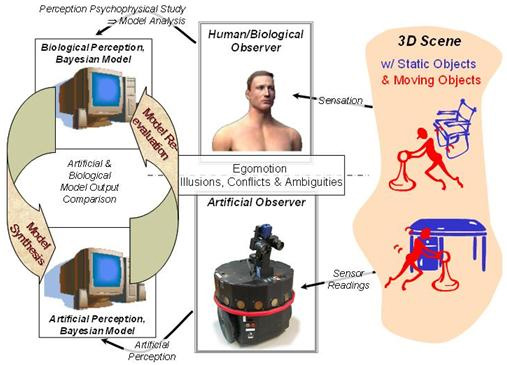
通过从哺乳动物脑部获取启发,包括从人类中获取启发,BACS项目将调查并应用贝叶斯模式和方式,开发人工认知系统,以便在现实世界环境中执行复杂任务
挑战