7趣味RU27





大陆架光特性复杂化,代表浮游植物、彩色分解有机物(CDOM)和非星粒子可变贡献过去几年中,通过远程或原地观测获得的光学数据量迅速扩展。实践证明,这些观察对划分水文特征非常有效,而传统物理数据目前同化成数值预测模型时则不明显。
Rutgers大学、Woods Hole海洋学学院、Dalhoussie大学和加利福尼亚理工大学的研究正在合作,将物理和光学观察与模型结合起来,提高我们对沿海过程的了解。
项目主要目标如下:
为了实现上述目标,我们目前正在努力:



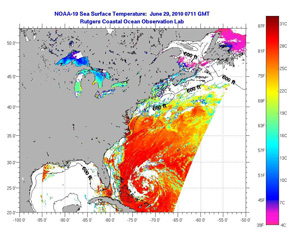
X-Band盘子(右键)安装于2003年秋季,收集NASAAA和Terra卫星的MODIS数据以及印度Oceansat卫星的海洋颜色数据
数据处理成各种产品(即海面温度、海洋颜色等)后转换jpeg图像便于下载和查看产品页详解海面温度是我们最大的图像库,图像回溯到1993年氯素集中图像可追溯到2001年其它图像归档从2004年开始
海洋学正在增强过去二百年的远洋科学,并使用分布式观测法,科学家与仪器、设施和其他科学家持续互动远程探索地球-洋-洋-洋系统以提供美国国家科学基金会海洋科学司启动海洋观察所倡议(OOI)
分片海洋过程广度时空测距对解决与地球气候、地球动力学和海洋生态系统有关的科学问题至关紧要创新海洋观测站提供前所未有水平的电力通信并访问实时传感器网络将驱动科学创新并提供教育和外联能力,这将极大地影响对海洋科学的普遍理解和公众态度
OOI由三大分布式互连观测站组成,分布式分布式分布式分布式分布式分布式分布式分布式观察台分布式观察台分布式观察台分布式分布式观察台分布式观察台分布式观察台分布式观察台分布式观察台分布式观察台分布式分布式观察台分布式观察台分布式分布式观察台分布式观察台分布式观察台分布式观察台分布式观察台分布式观察台分布式观察台分布式观察台分布式观察台分布式观察台分布式分布式观察台分布式观察台分布式观察台分布式观察台分布式观察台分布式全球级观察台式观察台分布式观察台分布式观察台分布式观察台分布式观察台分布式全球级观察台式观察台分布式观察台分布式观察台分布式分布式观察台式观察台分布式分布式观察台分布式观察台分布式分布式观察台式分布式观察台式观察台式分布式分布式分布式观察台式观察台式分布式观察台式观察台式观察台式观察台式分布式观察台式分布式观察台式观察台式观察台式观察台式分布式分布式观察台式观察台式观察台式分布式观察台式观察台式分布式分布式观察台式分布式分布式观察台式观察台式观察台式观察台式观察台式分布式分布式分布式观察台式观察台式观察台式观察台式观察台式观察台式观察台式分布式分布式分布式分布式分布式分布式观察台式观察台式观察台式全球台式分布式分布式观察台式观察台式观察台式观察台式观察台式全球台式观察台式观察台式全球台式观察台式观察台式观察台式观察台式全球台式观察台式观察台式全球台式观察台式观察台式观察台式观察台式观察台式全球台式观察台式观察台式观察台式观察台式观察台式观察台式观察台式观察台式观察台式观察台式观察台式观察台式观察台式观察台式观察台式观察台式观察台式观察台式观察台式观察台式全球台式观察台式观察台式观察台式观察台式观察台式观察OOI网络基础设施构成整合元素,连接并绑定三种海洋观测台和相关传感器并形成系统一致性
OOICI目标提供综合联合系统观察台、实验室、课堂和设施实现OOI任务通过OOI向研究科学家提供的基础设施将包括海底电缆加水柱固定和移动系统CI倡议还包括统一项目管理、数据传播归档、对海洋观测台科学长期成功至关重要的教育和宣传活动等构件OOICI视觉向OOI用户提供系统,从科学界开始,使OOOI资源能够简单直接使用实现科学目标视觉包括直接存取工具数据、控制和业务活动,并有机会与其他科学家、机构、项目和学科无缝协作
COSE-NOW建议使用海洋观察系统生成的信息,作为一个强大的平台,提高公众对海洋的认识并激励公众支持海洋研究
COSE-NOW的使命是帮助利用改变式海洋研究和有效的教育实践启发学生和公众探索、发现和管理海洋
COSE-NOW确定了三大投资领域,整合PI项目的资源和经验,促进高质量OS教育和公众拓展,为COSE网络出力
目标包括:
主题COSE-网络化海洋世界可用作提供教育领导能力的工具,因为观测站继续从视觉向现实过渡COSE努力将引导EPO协同活动,与现有和新建天文台、可视化和网络基础设施技术相关联,这些技术未来五至十年上线
COSENO将解决确认OOS社区需求,包括开发教育者领袖社区,创建协调教育产品汇编,实施向目标用户群体提供这些产品和信息的战略此外,我们将提供连接海洋观测站科学和社会需要的桥梁,同时促进教学和学习,扩大代表性不足对象的参与,加强教育基础设施,向教育家和科学家传播结果
CORE员工将确保中心目标实现并召集咨询委员会和工作队项目伙伴将管理中心的具体任务未来将纳入更多项目伙伴,因为COSE的协作性将有助于在相关领域调用资金
COSE-NOW及其伙伴、目的和目标都聚集并组织起来,以满足OS科学和EPO社区表达的需求,如本提案支持信所示。网络COSE经验证明OSEPO成绩记录和我们对成功伙伴关系素质的理解将服务于我们和我们执行本建议概述的任务
海洋网络成功与否的衡量方法将是提高科学对海洋的了解,提高人类社会的海洋知识素养。拟建COSE-NOW将建立建立网络化海洋世界所必要的科学家-教育者合作伙伴关系
我走进控制室 带全景海从远程传感器上更新全局图片, 进化子表变量地图, 图表显示我们所有Slocum科学平台的位置和状态, 令我满意的是,我们正在比任何人都深入深入地看海洋。” Henry Stommel(1989年)
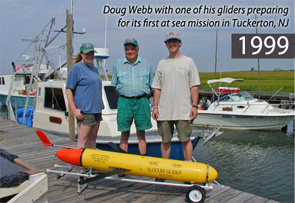
探索全球海洋一直是驱动人类社会的根本因素历史人类数世纪以来依赖船舶提供平台生存、旅行和探索海洋远洋探索的下一大技术进化是开发卫星遥感1970年代的这场革命 提供了一个全局透视 从根本上改变了我们对世界海面观海洋机器人在过去十年的到来开启了下一场海洋学技术革命机器人提供大海底海洋图片沿海海洋观察实验室致力于向前推进机器人革命
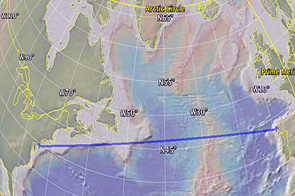
立陶宛2006年Rick Spinrad从NOA坐下看我们并开始对话,“为国家着想,你必须启发下一代科学家和工程师,我希望你与机器人跨海盆。”sprinrad挑战我们认为使用机器人开发海洋永久存在是激励下一代科学家和工程师的强大工具因此,我们希望开发长时飞行并让年轻科学家在其本科生年中执行这些任务向年轻人展示科学工程探索 最有回报的职业

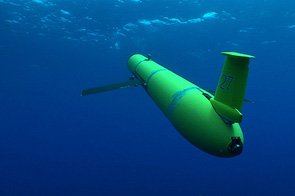
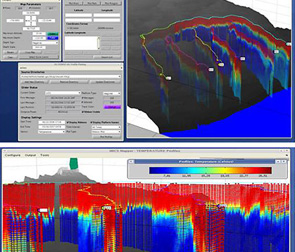
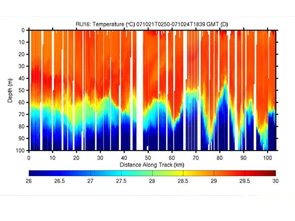
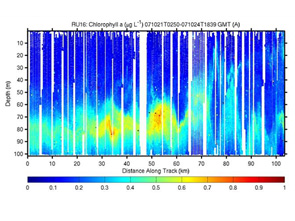
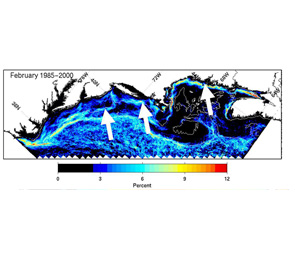
光特性复杂代表浮游植物、彩色分解有机物(CDOM)、海洋和大气衍生非藻类粒子的可变贡献相对贡献对封闭内海如地中海特别复杂关键是要从卫星收集区域海洋颜色数据,并辅之以空间次表层测量开发配有各种物理/光感应包的自主平台大有潜力Slocum沿海滑动器搭配适当的光传感器套件时造出理想平台Glider工具开发Ginder运算中心允许世界任何地方操作者远程控制并可视化Glider数据,这些数据很容易与数值模型数据输出和/或遥感图像合并
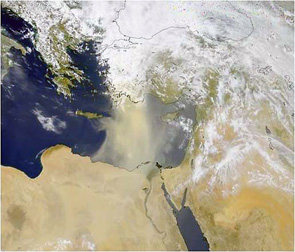
滑动数据将解决地中海大气灰尘的重要性大气衍生养分的重要性已经显现出来,对海洋生态和生产率的作用经常被假设以地中海为例, 撒哈拉和北欧国家的灰尘假设占新产量的15%和地中海初级总产量的14%记录沉积及其与时间段(周数至月数)和空间段(100-1000千米)间初级生产率的关系一直困难重重迫使工人们依赖遥感但这些方法很容易产生灰尘,模仿卫星图像中浮游植物的存在海洋颜色算法使用遥感反射估计叶绿素a清晰水中灰尘会影响实证算法的精度海洋信号与大气灰尘相关联吗?灰尘对原生光学特性和生物群落的影响
基于这些兴趣,我们将在这个项目中
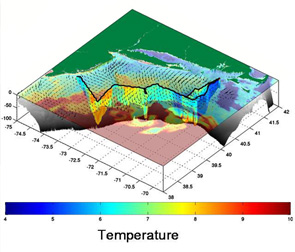
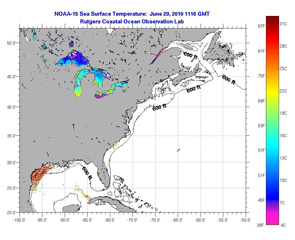
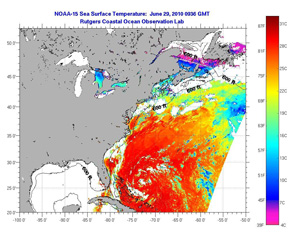
SST合并卫星CODAR和MURI赞助滑动线路能力合并模型输出
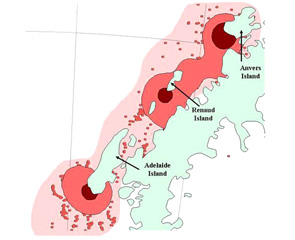
以开发技术记录并理解沿海水域变化如何影响挪威沿海和西南巴伦支海生物资源和生态极地生态系统上个世纪经历巨变热空气温度解冻,河流排泄量增加,北极冰变薄很难通过自然变异解释这些变化,低频流域周期和偶发事件的作用仍是一个未决问题船流量增加,油气生产和运输在亚弧度扩展巴伦支海还受大河流(Ob、Lena和Yenisey)和俄罗斯军事设施污染,这些设施一直是核废料源所有这些都代表复杂的国际问题,影响沿海水域,跨时空尺度并需要收集相关时序数据
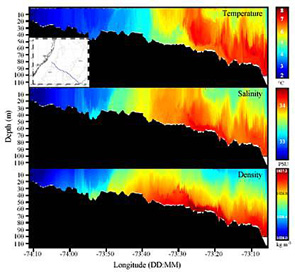
采集连续时序海洋数据是一项艰巨挑战,因为空基遥感或岸基雷达仅可访问面。物理水文学和生物地球化学参数高度可变并交织于无法使用传统采样方法适当采样的广度时空尺度(计千米至数十年)。这将需要开发次表层机器人网络需要时间序列观察解决偶发事件相关参数的均值和差值,并解决季节性、年度性及分层间参数差未来十年中的这一伙伴关系将为全面理解生物地球化学周期和时间趋势打下基础,以便能够开发、参数化、初始化和验证全球沿海生物地球化学模型目标是开发联合本科生程序,让国际学生骨干成为部署前沿新机器人网络执行团队,研究南极的潜在气候响应
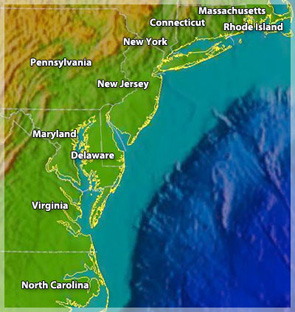
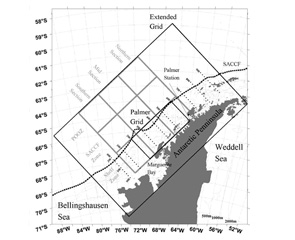
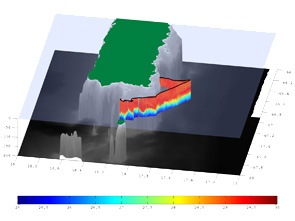
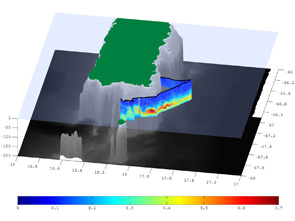
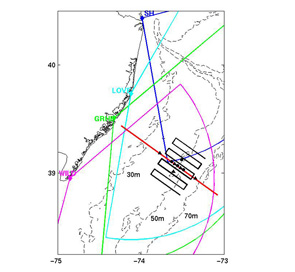
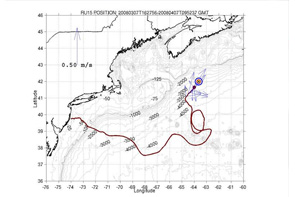
拟议的国际协作侧重于挪威沿海流对巴伦支海南部物理海洋学和生物地理学的影响灰线表示大流点黑线显示平均气候冬冰度固红线表示每月使用AUV组合进行的跨岸勘测破红线表示沿岸Langragian测量(每次测量由箭头指定)在春季或夏季过程研究期间进行固蓝线表示现有和资助的挪威海面流雷达巢
最后,从滑翔机获取实时数据的能力对21世纪海洋动态生物研究的自适应采样需求至关紧要


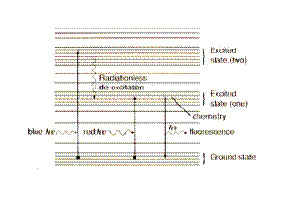
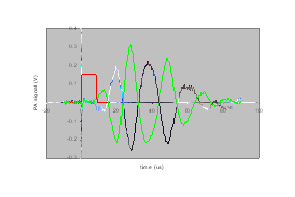
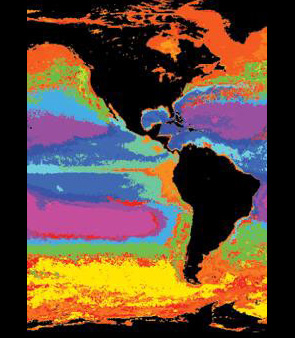
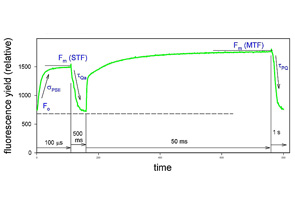
绘制浮游植物集中度和生产率图的能力是理解地球生物地理学的关键虽然在利用海洋色技术绘制浮游植物集中度方面大有进展,但测量速率过程的能力仍然困难重重。开发探索世界海洋的新平台因为这些技术代表着海洋探索的未来,因此必须为这些平台开发新传感器浮力驱动滑翔机代表最具挑战性平台,因为这些系统需要小传感器最小功耗因此该项目的目标是开发新传感器,测量浮游植物的健康,传感器可搭载Webb Slocum滑翔机近十年来,叶绿素荧光测量为控制浮游生物生理学和海洋初级生产提供了史无前例的洞察力技术依赖主动启发检测并随后松动微秒和毫秒时分叶绿素荧光导出可变荧光分析提供全套浮游植物荧光和光合参数从中可以推断出光合状态的详细图片测量参数为模型毛初级生产率和评估环境压力影响提供基础微量流频上传松绑系统Webb滑动这个项目将展示FIRE安装在Webb滑动器上
迄今结果

研究的目标是开发新的基础架构、理论、算法、工程解决方案和跨学科课程,解决海洋学未来挑战性问题具体目标包括:
背景:提取当前环流
裂流是美国沿海海洋溺水和营救事件头号原因美国救生协会表示,2003年总冲浪区搜救量的71%,12 137起事件,均归因于裂流开关流为强近岸特征,跨岸速度约1m/s和沿岸尺度数十米裂缝机制包括波底边界交互作用、波波交互作用和波流交互作用(Dalymple,1975年!1978年DalympleSONU1972年)长岸流由波破解产生的辐射压力驱动理论开发良好差强人意的理论 跨机流表层 裂流加利福尼亚州的做法是使用hf雷达流线作为外界驱动内架模型波高度、周期和方向是边界需要的第二输入增加波和当前近岸观测将有助于研究人员更好地了解当前裂变优条件,并最终为预测裂流提供必要的边界条件
项目目标


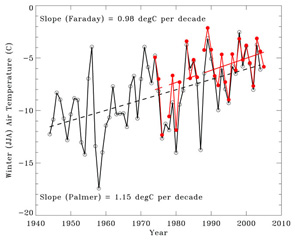
西南极半岛正在经历地球上一些最剧烈的气候变化WAP区域在过去半个世纪中经历冬季变暖趋势,为全球平均值的5.4倍理解这些变化极难分解,而我们正在观察的空前变化可能预示未来海洋的潜在变化。
海洋生态系统正在变化并开发能力解决这些变化并理解对人类的影响即对海洋学的清晰感召传统采样模式不足,必须集中努力开发网络,使之能在严酷环境中运行并持续海中生存。拟建机器人网络将提供社区需要的关键进步我们还强调,拟议网络模块化,可移到任何沿海架子并升级到流域尺度
组合物理/生物化学机器人采样,使船舶适配采样跨生态相关空间尺度机器人网络还将提供没有船舶时的生态数据我们称这个灵活智能网络为达尔文集群达尔文集群将提供远程原位传感器和器件网络,这些传感器和器件的运作方式类似于昆虫圆形和分布式网状“工人”机器人,所有机器人都拥有集体协同服务集中式岸基脑具体需求的具体能力。
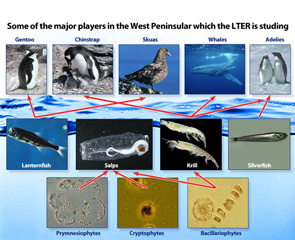
收集的数据将为数值生态系统建模提供临界空间数据我们建议使用机器人研究大气强制作用、物理混合和浮游植物富集度、代谢和多样性之间的动态交互作用这些数据将与高营养级主动和被动声学采样合并机器人网络采样策略将灵活化,以便随着生态系统的进化适应海洋物理力初始优先级将放在南极半岛上生物热点上,这些热点是生物地理学、浮游植物生产率和更高营养级进食(浮游动物、企鹅、鲸鱼和海豹)的关键领域。机器人网络数据还允许船舶靠近时进行自适应采样这项工作将直接带动NSF赞助的长期生态研究程序沿WAP展开