- 提供配置文件
- 我们研究的重点是设计、制造、控制和分析生物启发微机器人和软机器人微构微系统设计方面的专门知识,加之节肢动物的洞察力,使我们能够创建高性能航空和运动微机器人此类机器人平台可用于搜救作业、辅助农业、环境监控和危险环境探索
产品组合
因蜜蜂生物学和昆虫栖息行为
- 并设计紧凑高能源极低功率计算和电子智能传感器创新并改进协调算法管理多独立机
机器人
-
-
- 体型对接 百合和康
实用应用
协调敏捷机器人昆虫可用于各种目的,包括:
- 自主授粉田
- 搜救(例如自然灾害后);
- 危险环境探索;
- 军事监视;
- 高分辨率天气和气候映射并
- 交通监控
常有应用 开发自主机器人模拟昆虫群体和行为强健性时 协调大量小型敏捷机器人 我们能更快、可靠和高效完成这些任务
视觉目标
合作者设想自然启发研究可加深理解 如何人工仿真蜜蜂群的集体行为培养新方法设计并搭建电子代理神经系统 能够敏捷感知并适应变化环境并预建小型飞行器
更广泛地说,科学家预测设备将开通各种发现和实践创新,推进领域从昆虫学和开发生物学到非定型计算和电气工程
通过与波士顿科学博物馆的关系,团队还将创建交互式展览以教化和启发未来的科学家和工程师
团队
调查人员主要设在哈佛工程应用学院,将与哈佛和东北大学生物系生物学系生物进化系协调工作
此外,华府微电子公司Centeye将提供技术知识,该公司专门研究视觉芯片和视觉传感器技术
数位合作者是新创Wyss生物启发工程学院核心教程成员Wyss任务“使用自然设计原理创建新材料和装置”,该研究所与SEAS一道,将在支持研究、提供实验室空间和实物金融支持方面发挥关键作用。
供资问题
哈佛三大领先机构之一根据NSF计算机扩展程序获得最新一轮奖项
程序由计算机信息科学工程局去年建立,为CISE研究教育界提供追求雄心勃勃基础研究日程的机会,这些日程有望定义计算和信息的未来并给社会带来极大利益。Expitives目前代表局最大单项投资中的一部分
研究概述
-
-
- 项目压倒一切的愿望是合并多类研究题目,实现机器人授粉器目标通过聚集生物学 计算机科学 机械电气工程专家 最终产品将远超出部件之和
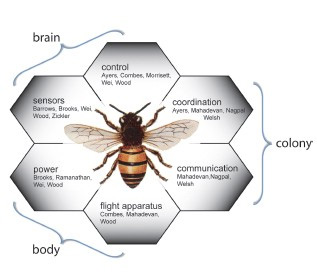
大型项目依赖多项交互作用并需要调查人员密切合作,而拟议研究完全归为三大类:身体、脑和聚居
人体包含所有方面的拟议工作 环绕搭建拍手机器人探索自由飞行机能和性能的几个方面 引导我们设计自主机器人蜜蜂
脑综合所有传感器控件算法和软件)和电路(即硬件)协调机器人飞行和目标识别能力
聚居区包含高层次支持,以协同方式实现复杂任务目标并发节能强力运维
项目强调研究人员在各种科学和工程学科协作实现雄心勃勃的目标网站还提供令人振奋的平台,以有形易取方式与公众分享科技突破
体质
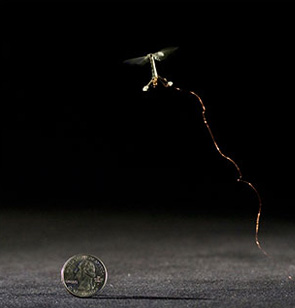
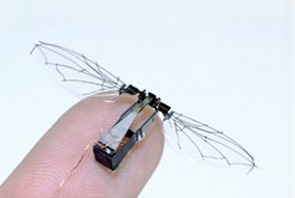
- Wood教授微机器人实验室于2007年首次成功飞地,通过利用现有突破作用,团队将探索在拟设备中模仿这种有氧功的方法。实现自主飞行需要紧凑高能源和相关电子设备,无缝融入机体
机器人蜜蜂聚居平台设计时将使用昆虫生物机理学原理和闪翼流动动态正确设计机器人蜜蜂所有机械机构件至关紧要,因为推力效率将决定飞行时间,有效载荷限制将决定用于感测、通信和其他机载电子的大小和质量
类似地,启动器电量需求需要开发高效驱动电子技术,并需要高能比比强的便携式电源因此,严格研究昆虫级飞行器的并发力学和空气动力学对项目成功至关重要
实现机体需要广泛研究(1)空气动力学和控制拍风飞行,(2)飞行装置的设计和编译,(3)便携式电源驱动电子
标题:小RoBEP:微型自治系统电源
团队:Shriram Ramanathan(院士)、KianKerman、Suhare Adam(Grad学生)、Siya Xuza(初级学生)、Quentin Van Overmere和YutoTakagi
抽象性 :
微型薄片固氧化物燃料电池可嵌入硅平台和kapton平台A substantial effort on materials research and design is involved in this study, that includes the following aspects: 1) oxide electrolyte and electrode materials synthesis in thin film form and suspended membrane form for high performance fuel cell devices, 2) fundamental understanding of ionic and electronic transport in confined structures under extreme chemical potential gradient, 3) detailed analysis of fuel cell performance and limiting factors and 4) fabrication of integrated fuel cells into robotic skins which requires a deep understanding of microstructural effects in thermo-mechanical stability.迄今关键结果包括可缩薄氧化物燃料电池首次演示、通过多功能氧化物阳极设计向燃料电池展示能量存储、各种燃料高性能操作,包括氢气、甲烷气项目还允许对各种本科生和研究生群进行教育研究培训与项目中的其他PI有强力协作关系,包括Mahadevan教授和Wood教授
标题:灵活昆虫翼和动荡空气流中飞行稳定性
团队:body
昆虫和飞控数方面 关键作用 活昆虫异常飞行性能 直接关联高效稳定的Robobe当前项目侧重于生物和工程文献中仍然不为人知的两个领域:机翼弹性对空气动力生成的影响和扰动不定空流对拍飞稳定的影响最近我们首次提供确定实验证据 昆虫翼弹性提高空气动力生成大黄蜂翼实验硬化弹性静脉联合显示,被动弯曲,特别是当翼半点端停止逆向时,可显著提高空气动力生成并显示多翼设计策略(包括弹性区在过度强力下产生)可减少昆虫翼因碰撞阻塞而积聚的破坏最后,我们正在探索复杂环境空气流对昆虫飞行稳定性的影响,通过风道测试稳定控制非稳态结构休克和户外跟踪实验探索昆虫如何改变运动模式以应对风乱条件
-
机体设备
-

芯片级固氧化物燃料阵列
-

闪闪发光的蜜蜂
脑部

- 科学家最复杂的探索领域之一是 搭建一组人工智能传感器 类似蜜蜂眼睛和天线微信教授解释说,最终目的是设计动态硬件和软件,作为设备控制监控飞行、感知对象如同机设备和其他对象并协调简单决策
第二组研究题目涉及开发“人才”,协调人体所有活动并实现下文描述的殖民地更高层次任务目标
包括自觉感知和扩展感应器、电子神经系统和控制算法正像身体聚焦于轻力高效推进组件一样,脑聚焦将包括计算高效控制、紧凑高效传感器和节能电子硬件
图显示昆虫神经系统功能描述(diptera)和函数物理表现混合架构块图与神经系统内部工作匹配
虽然我们不建议一对一复制件,但我们再次使用昆虫生物学指导人脑设计
殖民地
-
-
- 蜜蜂聚居群显示极高效适应行为,即使单蜜蜂小于它所生存的世界蜜蜂聚居地常发现并开发2至6千米内的资源,根据聚居地的环境和需求调整蜜蜂数探索并开发多资源(花蜜水),甚至当世界发生巨变时恢复原状仍有很多有待理解之处,生物学家相信许多这些复杂群度行为产生于蜂巢中蜜蜂之间相当简单的互动关系,因为它们共享信息并自适应自己的选择。似乎没有头部或中央机构协调蜂巢
实现复杂社会昆虫聚居提出了数项挑战需要开发精密协调算法 匹配简单有限感知通信和蜜蜂一样,利用蚁群整体能力至关重要 -- -- 并行性(大面积探索)、能效(通过信息共享和分工)和强健性(因为个人可能失败或出错)。特别是自强力强力(并因此感知/通信)可随身携带
管理成群机器人(千人或数人)时,编程语言运行工具支持全局化方法关键挑战将是如何设计和可扩展实现宏语言,目标可表现为聚居地高层次目标,底层系统将目标转换为单蜜蜂决策并随着世界变化重新优化
机器人聚居区挑战与计算机科学许多其他领域分享 -- -- 例如多机器人和机器人群系统、分布式传感器网络、编程语言研究甚至合成生物蚁群团队利用多学科的专长和知识,我们期望我们的方法应用到多大系统
目前我们的一些努力包括
卡尔马编程系统与存储控制策略
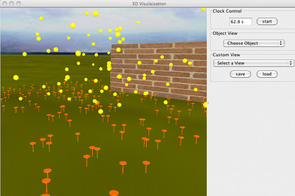
imbeetic模拟环境
希里测试环境
(4)蜜蜂信息共享模型








