- 提供配置文件
- 生物模拟磁系统实验室的目标是利用动物操作、运动、感知、激活、机械学、动态控制策略等特征,从根本上提高毫机器人能力实验研究范围从基本理解机械原理到新造技术到自主毫机器人系统集成实验与生物学家密切合作开发功能模型,这些模型可以在工程和自然系统上测试实验当前研究以全地形爬行为中心,使用纳米结构粘合器和生物启发式飞行
产品组合
编译机器人
- 为何脚形机器人
带式系统比轮式系统提供一些关键性能优异长脚系统不连续接触地面,轮子需要持续支持路径使脚生物和机器人遍历挑战性地形某些链式系统(生物和人造系统)可克服比系统峰高高三倍以上的障碍物,轮子限于不高于半径的障碍物归根结底,或许最有意思的是 自然界所见的 链形生物动态行为多条腿动物展示动态自稳定行为即系统被动机械特性受自然拒绝干扰调适,否则可能造成系统不稳定行为
-
最近结果
-

1 StAR:1运算器STeerAble机器人
- (2014年6月)
显示新动步控制机内转机(前向、后向、时钟和逆时针旋转)句子利用交替姿态三叉杆之间的守法差分,通过控制机器人加速生成旋转扎鲁克和恐惧
-

滚动振荡调位转
- (2014年6月)
新的动转模式在行人机器人中展示,它使用相锁步态来感动并发高度和滚动振荡变换机器人增强滚动转206dg/sec速度为0.4m/s哈尔丹和恐惧
-

Slippery用Picket机器人探测
- (2014年6月)
StarlETH实验(ASL,ETH苏黎世)和UCBVeriocroACH使用联合定位检测滑地精度92%哈尔丹等IEEIICRA2014年6月
-

空气动力引导赛
- SailROACH尾部使用空气动力转转,实现1.2米半径转转,同时运行1.6米/秒比例定律对快速运行小机器人的转转模式有利Kohut等人IEEIIROsNov2013年
-
稀疏自控机器人
- 公元前2013年
机器人横向平面上可变腿伸展角以适应其僵硬性、高度和脚对地接触角接触角和正常接触力大为减慢时,无序角低,光滑面速度提高,所有速度稳定运行达5.2m/s扎鲁克等人ICRA2013
-

动物启发式设计和空气动力稳定
- 简市2013年
VelociROACH长10cm30克六分毫机器人,可以2.7ms运行,使其成为迄今为止最快脚机器人相对于尺度动态相似性技术加空气动力阻塞提供高速稳定公元前哈尔丹等IEEEICRA2013
-

动态滑面爬升
- 公元前2012年
动态攀登近垂直面引出反应力,需要更多常态粘合以防止下降动态爬坡30度成功12赫兹段速率,但70度斜率只有4赫兹Birkmeyer,Gillies,恐惧IROS2012年10月
-

快速反转:运行动物和机器人
- (2012年6月)
鸡尾酒和格科斯跑步时可以在像运动那样的钟头下摇动ASH机器人可以相似方式摇摆蒙古ALPLOS2012年6月
-

6条长腿TAYLROACH
- 百毫米比例机器人TAYLROACH运行时可快速旋转90度Kohut等人CLAWAR,巴尔的摩,2012年7月
-

Octoroach尾巴
- 百毫米比例OctoroACH机器人使用差分驱动法每秒100度或动态尾巴旋转,峰值旋转率为每圈400度Pullin等ICRA2012
-

DASH+Wings:联队辅助运行
- 公元前2011年
DASH+Wings是一个小六翼机器人,用拍翼提高地面运动能力机翼增加爬坡和稳定性,但不为飞行提供足够推力翼辅助运行机器人 并隐含禽飞进化生物感知和生物感知
-

Octoroach:双驱动 米力机器人
- sp.2011年
OctoroACH机器人质量小于30克,并包括图像进程CPU和gyro、加速计、无线电和相机,能够在粗糙表面移动机器人设计推送Pullin等ICRA2012
-

CLASH:爬上松散垂直布
- sp.2011年
CLASH机器人质量为15克,并使用简单被动爪子机制并连带平面驱动系统,可爬上松散布面15cm秒Birkmeyer等IROS2011
-

MEDIC米利罗博特人支持爬山
- 公元前2010年
医疗机器人质量为5.5克,并能够使用静态SMA驱动器定位一毫米内机器人包括摄像头和无线
-

动态转动调适腿硬性
- sp.2010年
ynaROACH机器人质量24克,每秒14次运行通过改变腿的僵硬性,机器人可执行90度转五步生物Rob2010
-

RoACH2.0和DASHGR媒体
- 四月2010年
GeorgiaTechGoldman实验室联合测量粒状介质运输成本显示5-30J/kgm为每秒6-10人长度
-

DASH十六克机器人
- 公元前2009)
使用兼容纤维板结构材料和单主驱动电机DASH机器人在平面上每秒能达15人长度结构恢复能力并生存地面冲击 终端速度为10米秒
DASH:动态15g六分机器人,IROS2009
-

RoACH机器人
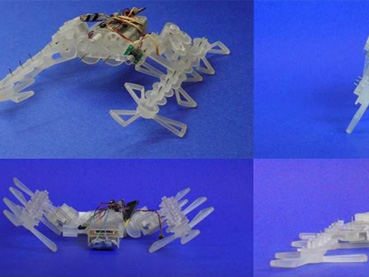
- 生物模拟磁系统实验室中,我们综合了我们建设毫机器人的专业知识和对链式系统的兴趣,以构建我们认为目前最小非系合式链式机器人-2.5克长腿机器人称机器人自动拉链Hexapo机器人使用智能复合微结构编程和集成形状内存合用电线所有电控通信电子设备都载入机内,全机器人用FullRiver公司20maHr液化电池供电
-

缩放双腿毫机器人原型
- 使用常用廉价素材 有可能生成折叠式脚机器人原型 约一小时内达60关节原型再用DC电机或像相片右侧显示的形状内存合金线等其他类型启动程序启动折叠原型
快速缩放morots原型编译,ICRA2008
生物启发合成GeckoAdhesives
- 微机和纳米机结构设计通过机械控制表面交互提供高摩擦和粘合力
-
新闻发布
-

低模微纤维阵列
- 2014年5月
高端聚合微飞数组数组代表静电传感器和电动器新式基数组,因为它们特征为低强度(<24kPa有效弹性模数)、低 Poisson比(低频带有效零数)和极低密度(固聚乙烯 <1%)。
微飞数组低模小比Poisson适配子串J微信微增市240650162014
-

GSA剖面粗糙
- (2014年4月)
开发了表面特征大小和粘合终端特征形状关系模型悬浮表面比纳米级特征大得多,spartula形状特征可使平滑表面粘力增加2.5倍和粗糙表面增加10倍
模拟合成壁数组剪切粗糙表面 JR.苏维埃接口,2014年4月
-

Gecko路面粗糙
- 公元前2013年
我们测量到最大剪切力 gecko脚可以实现 正弦模式 大小相似脚趾和瘸子结构外延和波长接近拉链长和拉拉间距的表面发现剪延显著下降,在测距中丧失95%剪延
Gecko脚步和hilkllar剪接宏形工程粗糙表面,JExpBiol,2013年10月
-

硬对软Fibrillar自洁
- (2013年6月)
对某些粒子大小和纤维直径而言,硬性(聚丙烯)和软性(单片橡胶)fribrillar粘合物在与球状粒子染色后可恢复粘合能力分析纤维、粒子和子串之间的接触强度显示,干自洁对小纤维直径和小损函数比较有效,如硬温塑
干自清除硬软Fibriller结构,ACS应用材料和接口,2013年6月
-

可控粒子叠加
- 公元前2013年
可控制对玻璃场的粘合并展示磁感动合成Gecko粘合结果显示场拉动力可增加十倍,通过外部磁场改变斜率取向,有效弹性模数从65kPa修改为1.5MPa
可控粒子粘合磁动合成Gecko粘合式高级功能素材,2013年
-

湿净化HDPEGSA
- 公元前2012年
硬聚合物GSA由高密度聚乙烯自洁水组成微飞粘合显示几乎全湿自净土粒子水滴恢复98%原状微飞粘合
超水分微信编译自高密度聚乙烯,Langmuir,2012年
-

GSA粘定物
- (Aug.2011年
HDPE和PPfrillar数组有剪延压力(0.3兆帕)足以变形纤维光素强度限制 并发强度令人惊讶的是,GSA保有54%原创应力,尽管有或有超过10 000周期的变形或标志性变形
热塑Gecko启发合成叠加物限值增强,Langmuir,2011年
-

Lamellar Nanofibrillar联合数组
- 公元前2009)
Lamellar结构作为高方位比HDPE纤维数组的基础支持平面伸展式Nanofiber数组可坚持平滑划线,剪裁强度比平面纳米飞格数组高5倍Langmuir,2009年10月
-

GeckoTire模型车2008年
- 微飞阵列包模型车轮恶魔高摩擦注:到目前为止,轮胎只工作平滑表面
高摩擦从僵硬聚合使用微波阵列Phys公元前信,2006年
-

定向反射微飞
- 公元前2008年
归并聚丙微飞体显示强向叠加效果,纤维方向直剪强度比对纤维方向滑动大45倍1sq.m.补丁剪切450克gecko启发式微飞数组方向粘合,应用物理字母,2008年
-

自洁GeckoAdhesive
- sp.2008年
首合成Gecko粘合法使用期间净化自如自然Gecko微信数组受微信封污染后会失去所有粘合强度重复接触干净玻璃后,微镜打滑,纤维恢复30%原状粘合纤维有非叠加默认状态,鼓励接触时清除粒子联系自清除合成GeckoAdhesive,Langmuir2008
GeckoAdhesion项目概述
- Geckos有非同寻常的能力运行 光滑或粗糙、湿滑或干燥、干净或脏地表geckos粘合特性基础是千千万万微尺度集成端端由100至1000spulae组成 直径仅为100纳米自1998年以来,由生物学和工程师组成的跨学科团队一直在开发模型,说明自然纳米结构如何在spartulae、spartal尾迹、setal尾迹、setal数组和toe机械等跨层组合中运行,并开发纳米构件过程,使大数组理发从经济角度编译
合成Gecko纳诺海尔属性
- 使用生物洞察力, 我们开发机器模型 来套接发 并设计,编织 测试微缩和纳米纤维结构gecko粘合系统七大基准功能性能由Austumn识别(2007年MRS公告):
- 异同附物
- 高拉出预加载比
- 低支队
- 物质独立性/范德华粘合
- 自洁化
- 反自交配
- 非粘性默认状态
低支队力、自洁和非固态默认状态表示硬聚合物,而不是压力敏感粘合器常用软聚合物如2002年报告所述,[Sitti和Safeing2002]和Audumun等合成spulae显示相似自然spulae100-300n并按数毫牛顿顺序在一平方公分面积上实现粘合力 平面平面平面平面平面平面平面平面平面平面2003年,我们编译高密度块数组显示剪切为0.5牛顿/qm.2006年,我们展示出新奇高摩擦阵列0.6微米纤维,显示剪裁抗药度为4牛顿/qm.0.8牛顿/sqm.正常负载PRL2006]2007年,我们展示聚丙烯纤维阵列如何提供剪切力而不出现正常负载JAST2007]2008年,我们制作易解易解硬聚合粘合式非粘合式默认状态JRSI(2008年),并可在接触期间自洁[Lee and FearingLangmuir(2008年)最终目标是搭建数组,内含必要的几何特征,这些特征与Geckos对粗糙平滑面有相同的粘合性
Gecko启发合成反射
-

Lamellar Nanofibrillar联合数组
- 公元前2009)
Lamellar结构作为高方位比HDPE纤维数组的基础支持平面伸展式Nanofiber数组可坚持平滑划线,剪裁强度比平面纳米飞格数组高5倍Langmuir,2009年10月
-

混合核心ShellNanowire连接器
- (2009年4月)
数组加盖纳米电线自联成可复用连接器单核化学连接器显出高宏剪合强度(1.6兆帕),最小绑定非相似面、异向粘合行为(听到正常强度比25)、低预加载、可复用性高效绑定微尺度和宏尺度维Nanoletss,2009年4月
-

减少抵抗Nanowire联系人
- 公元前2008年
镍纳米线可增加真实接触区并减少接触阻抗探针和二百纳米数组加十微镍线比触摸扁片降序使用兼容镍纳米线阵列IEETER康普市并打包技术师2008年
-

定向反射微飞
- 公元前2008年
归并聚丙微飞体显示强向叠加效果,纤维方向直剪强度比对纤维方向滑动大45倍归并纤维还显示正常粘合而不切负载,不同于垂直纤维gecko启发式微飞数组方向粘合,应用物理字母,2008年
-

自洁GeckoAdhesive
- sp.2008年
首合成Gecko粘合法使用期间净化自如自然Gecko微信数组受微信封污染后会失去所有粘合强度重复接触干净玻璃后,微镜打滑,纤维恢复30%原状粘合联系自清除合成GeckoAdhesive,Langmuir2008
-

叠加弹性板
- 公元前2008年
连薄膜都粘到非开发面上,如球面,需要伸展和弯曲分接小盘减少膜菌株并增加粘合
绑定弹性板到球体上 Proc皇家SocA2008
-

方向壁粘合
- 简市2008年
首易附加易解并定向合成Gecko粘合使用硬聚合微飞micfiber数组使用4200万聚丙烯微分数补丁支持9nsqcm估计接触区预载量仅为0.1N/sqcm
滑动诱发粘合物,界面2008
-

剪切聚丙烯微飞
- (2007年)
剪接0.1N/sqcm0.6微聚丙烯纤维阵列正常预加载小于0.05n/sqcm[Schubert等JnlAdhision理工学院和Tech.2007年]
-

高摩擦聚丙微飞
- (2006年)
高摩擦不使用软/固态素材显示0.8N/sqm系数摩擦大于5
Majidi et al PL2006美国物理学会版权(2006年)
高摩擦从僵硬聚合使用微波阵列Phys公元前信,2006年
-

侧接触模型纤维粘合
- (2005年)
侧接分析纤维粘合Majidi,Groff,efingJAppl物理2005]显示足够长的纤维,例如碳纳米管可刺侧接触侧接力比西半球端接力多10-20倍
-

侧接触阻塞校验
- (2004年)
光阻密度受阻塞-双尖插件限制 大于纤维间差 和侧侧拉近纤维平方阵列预测有更好的阻抗聚效纤维(0.6微米直径)显示阻塞行为Majidi,Groff,Searting2004
-

表面粗糙对粘合强度的影响
- (2003年)
表面粗糙度大大降低fbrillar粘合物的粘合强度罐形纤维模型预测,表面粗糙度从1微米上升至15微米时,粘合度下降5分
Campolo Jones 恐惧IEENA
-

高密度纳米纤维
- (2003年)
聚氨酯直径200纳米和60微长编译因阻塞作用力有限
-

合成spartula数组
- (2002年)
人工填充阵列从纳米缩进和投送测得约200-300n粘合力/spartula数组总面积小于100x100sq....Sitti和恐惧IEE Nano2002
-

橡皮微跟踪阵列
- (2002年)
数组硅胶尾迹,直径6微米和高度6微米显示0.003n/sqm.adhision和60nsion/
-

合成spartula
- (2002年)
单片机用纳米缩进和投送法从硅胶(E~0.5兆帕)和聚酯(E~1000兆帕)建构使用原子力显微镜从单聚酯抽取290NN力,端半径350NN和硅胶180NN相似拉力支持Gecko粘合物物质独立性假设Autumn等PNAS2002]
Onithopter项目
- 滑动飞行提供高可操作性,在一个局部结构化室内环境操作实现强智能搜索和室内导航等任务时,Onithopter可操作性将同学习方法相结合,对扰动和阻塞性质最小假设这种方法将为单车或多车开发最优控制策略基于全球最优分布增强学习,我们建议开发算法,供一组Onitopers合作感知和导航门墙等非建模屏障三维动态全模拟验证研究 多行实验室测试台, 并使用室内飞机
协作者:
师傅Pieter Abbeel计算机科学分院
师傅Robert Dudley,UC伯克利
-
最近结果
-

Onithopter自由飞行比对风洞数据
- (2014年6月)
使用从Vicon运动抓取系统收集的免费飞行数据,对Onitopter飞行比对测微风洞力和时分值风洞低估平衡点攻击角15度,平衡速度两组误差0.1m/s2m/s(ICRA2014)
-

窗口轨迹协同OnithopterMAV
- 公元前2013年
显示13克Onithopter与使用计算机视觉轻量地面站之间的合作寻标H2Bird特征为碳纤维机体、尾转子和电梯,并携带2.8克有效载荷地面站使用实时运动跟踪算法向hopter提供标题估计模型精确预测后向可达区通过窄通道飞行自主代理器和多试剂系统
-

飞行控制目标搜索 13克Ornitopte
- Sept.2011年
显示自主飞行控制 13克或nitopte开发出闭路姿态调控器 使用机载感测计算资源
-

双点Onithopter
- Sept.2011年
博尔特是一个13克或nitopter使用双腿混合模程运行模式中翼提供被动稳定机翼辅助运行BOLT可运行2.5m/sec并同时保持地面接触
-

高度调控iBird
- Sept.2010年
自由飞行空气动因稳定平衡点与交错飞行空气动因比较使用外部摄像头和机上电子设备开发闭环高度调控结果表明,系式空气动力测量12克或nithopter零引速度小化总飞行力24.8m
-

图像prec2.2CPU
- (2010年8月)
图片Proc2.2设计修改 StanBaek板装手机、陀螺仪、加速计802.15.4收音机和2信道电机驱动器1.4克
-

ibord-bot
- 公元2010
商业可用iBird悬浮容量或nithopter配有ImageProcdspIC33CPU板总质量12克
-

高效反响驱动
- 公元前2009)
电池驱动DC电机驱动曲柄模型开发,实验显示用共振驱动时所需功率下降30%
-

光流Onitopter
- 公元前2009)
光流有一个大型超高速组件元件可采样机侧拍频率恢复底层信号
-

万普博特
- (2009)
商业可用VAMP或nithopter定制低质量电子总质量约13克,包括蓝牙手机摄像头
-

图像处理器1CPU
- (2008)
PICCPUOView摄像头 Fernando Garcia Bermudez设计Schematic图像程序v1.0
伪机器人折叠原型
- 体积下降时 面积比量增加机器人质量与体积成正比,增加比例表示表力(例如电子吸引力)比惯性强大机器人(和机器总体变小后)移动部件摩擦可能成为能量损耗、穿戴和不可预知行为的主要来源生物模拟磁系统实验室开发出一个进程叫Sctive复合微结构(SCM), 使我们能搭建小强轻重机器人和结构,搭建成单片并叠装成复杂形状和链路内存合金提供运动
CCM进程细节见:R.J.Wood S.阿瓦德努拉塞海Steltz R.S.恐惧感
ASME机械设计杂志130号5,2008[链
面向纸板:SCM:A.M胡佛和RS恐惧,快速缩放程序foldedMillirobotsi封装机器人自动化Pasadena,2008年5月[链
-
原型折叠机器人
- 即使是单片机进程 小机器人可能很难设计体积大小使组装挑战性,二维图解设计三维折叠机器人的固有难点也延缓进程为了避免设计早期阶段代价高昂的错误,许多思想将被测试和丢弃时,我们用常用材料制作了与单片机进程相仿的缩放模拟缩放过程让折叠机器人设计师从纸面设计转成功能缩放原型快速迭代可减轻承诺小型设计和编织为时过快的风险设计师可自由探索大尺度上各种思想,放弃不成功尝试并快速整合流程中所获教益,制作出大得多可能小尺度上成功设计
原型进程:逐步讲解Hexapodcrawler实例
- 所需设备和用品
2DCAD软件
VersaLaser激光切割器
招贴板
粘合式粘合式粘合
聚用胶片(0.001-0.04"厚
glue(白或cianacrylate)
-

步骤1:绘图
- 进程起始二维绘图程序支持向量图形实验室使用2DCAD程序 Solidworks也可以使用像CorylDraw这样的程序Solidwork偏爱它,因为它对维度有明确的控制并允许用户定义图内实体之间的关系流水线会变弹性链 机器人有色红色 代表部分轮廓线则有色黑色蓝线标注和评分线段在不同时间切分-原因解释分步
-

步骤2:裁剪弹性
- 蓝线先切成平方 并创建折叠线中间工作件折叠和柔性裁剪,对图片右侧显示的工作件产生反射裁剪
-

步骤3:弹性层插入
- 胶布分布在工作件内部面部 一块聚酯大到足以覆盖所有弹性裁剪画板折叠成形,双侧叠加聚变胶片注意调整弹性裁剪对齐性可以通过把折叠片提升到光线来检验
-

步骤4:淡化
- 折叠工作件穿透滚动最大压强台阶保证招贴板与聚合弹性膜连通生成的三文治现在准备对激光切割机切分
-

步骤5:裁剪大纲
- 三明治放回激光切割机必须将工作件重新定位到与步骤2相同的方向上,因为步进二切换弹性体轮廓部件切片图片左侧显示部分轮廓割除,但没有从工作架上去除
-

步骤6:释放部件
- 部件现在可以从工作机上跳出结果集成化 分解链路 柔性裁剪线置入画板 僵硬招贴板链路
-
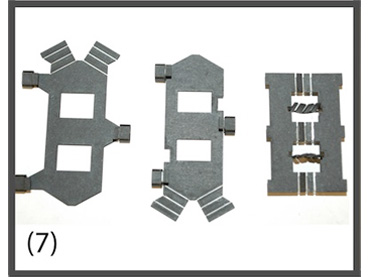
步骤7:前置连接
- 中任何一个部件都含有连接点,可以在合并前折叠,此时可折叠并粘合左侧图片中四栏链路通过折叠连接左侧两段四栏组装全结构时 将形成六脚机器人的臀部右侧部分叠入Sarrus链路连接置中完成机器人并分包扩展服务提升并下调两组三叉子
-

步骤8:最终装配
- 单个部件或子组件现在可组装右侧照片中 7步三盘粘合左偏板底部,Sarrus链路居中位,7步图中位板居顶部双腿粘到四栏臀部,双腿端配有球状硅胶橡皮脚
示例结构
-

SMA驱动式爬虫
- 这些文件用来切除形状内存合金驱动爬虫
-

驱动六叉
- DC电机也可以与分步指令集合爬虫集成爬虫使用相同的运动学技术,但经过修改以适应电机和机架列车弹性链条也可以用作springs在这个原型中,小曲膝盖加到腿上以便小量达标
-

5X缩放微机飞昆虫
- 微机飞昆虫使用双机翼驱动器驱动滑动曲柄连接到4栏一对四条驱动一球四条 起机翼连接作用机翼2DF并使用15联通模型共使用30个弹性接头和另外30个固定接头结构/空框
-

actoroach机器人
- Octoroach机器人设计Pullin等ICRA2013年OctoroACH单方使用1DC电机小飞玩具中可见传输像VAMP
使用其他材料原型
-

.
- 招贴板方便易得、廉价和相对强健,对激活模型而言,更强健工程素材比较可取。最近我们扩展此进程使用G10纤维玻璃G10提供比纸板高精度模数并强光玻璃还开通了将印刷电路板直接整合进机器人骨架的可能性
-

MEDIC米利罗博特人支持爬山
- 公元前2010年
医疗机器人用薄玻璃板编译,质量为5.5克,并能够使用静态SMA驱动器定位一毫米内机器人包括摄像头和无线








































































