行为头波
项目的目的是自动识别人们从远程摄像头向高层次推理系统提供输入人所面向的方向能很好估计他们的视线方向,可用以推断人或兴趣对周围环境的熟悉度可视之为缩小距离对人粗描述与四肢更详细运动之间的差距,通常从近距离获取工作部分由HERMES供资,HERMES分包3和4
活动场景探索
有效使用资源是这个项目的底层主题相关资源由一组摄像头组成,它从不同透视角度忽略公共区。摄像头异同并有不同的参数控制,例如偏斜缩放摄像头信息定理测量法用于选择这些摄像头的最佳监视参数,而最优则可用更高层次推理或人操作符定义当前,工作侧重于信息理论和传感器数据聚合技术应用的客观功能,以作出知情决策。
HERMES项目的一部分,目标是建立感知/动作周期,并具体考虑各种缩放层次分布式摄像系统可解读为抽象传感器,内容高端目标输入
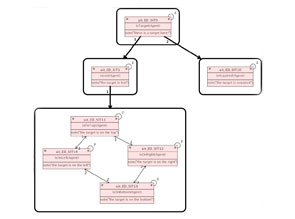
代理最粗度表示法被认为跟踪代理并记下它们的轨迹,并加之其他粗度比例特征,这些特征对行动和意向识别有帮助。目的是生成行为和概念描述代理自身及其关系相对于现场其他代理和预定义对象
认知计算机视觉
最近视觉跟踪和摄像控制工作已研究贝叶斯网络使用参数和非参数信传播活动识别问题,并开始触及因果性问题当前研究将所有这些领域推向前进最终目标将是合并这些技术制作泛工照相机系统/或摄像头网络,通过理解场景可智能方式分配注意力,从视觉数据自动推断出
题目直接与EU项目HERMES相关联,HERMES位于智能视觉监控这个令人振奋并具有社会相关性的领域。研究的目的是开发摄像头系统,通过开发算法和文理理解视觉场景来显示突发认知行为







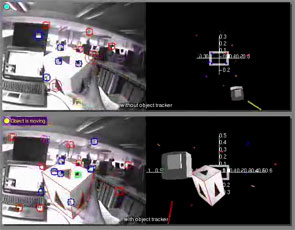
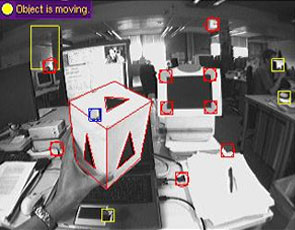
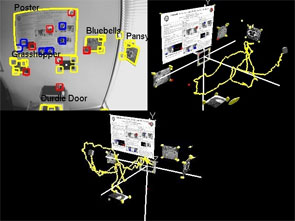
上头视频播放单目SLAM系统运行比对系统没有对象检测松散跟踪因特征不足, 并在此点视频减慢以突出显示这一点系统继续物体检测 视频尾端它成功检测到所有五大对象 并精确定位世界