机器人社会
能源和燃料电池
家建自动化








ARSKA实验室自主远程运营车辆研究测试台测试台基于强力四轮驱动HondaATV

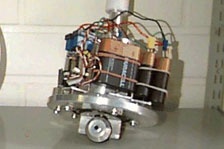
球机器人基于球结构移动机器人多功能性能,例如很容易流气证明,很容易从碰撞中恢复,覆盖可机械持久化,机器人无法翻转或下降球机器人还有几件有趣的应用 其中一个基于互联网虚拟实验室解析
运动控制系统完全搭建在球内机上控制系统建在微控制器上传感器包括电机编码器、姿态传感器和速率陀螺仪测量标题变化机器人通过PC远程链路控制动态属性、运动控件和机械学都与原型机器人模拟器一起学习IDU内部驱动单元三种不同版本,均显示于图片中,迄今已建构右侧显示版本大都使用今天版由分包商Rover有限公司(Stpetro)机械设计和制造
专利号960103发明者托斯腾申贝格市