研究领域
研究领域大小不等,从大约20名研究人员和30名研究生到100名研究人员和150名研究生不等。LTH的大量研究是跨学科的
机器人控制系统和其他制造设备传统上闭合这一情况妨碍了操作器、传感器和其他设备系统集成结果,这种系统集成往往是在不适当的高层次上实现的。
前后项目的目的是展示如何组织开机控制系统并通过实验验证验证这些思想
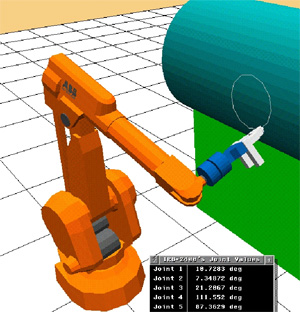
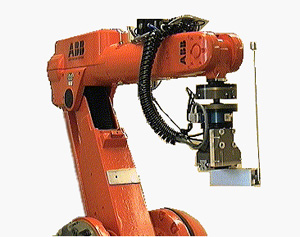
作为研究的一部分,我们已经开发出数个实验开放机器人控制系统系统环绕工业可用机器人搭建,为实验目的重新配置
开发专用机器人接口和将机器人整合成完整系统为测试开发算法提高性能、传感器集成性能、编程自动化和自主操作提供了独特的环境