

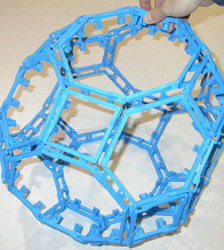
多位设计迭代和原型后结构稳定化阶段exosqueletton由12三角碳纤维棒管组成
传感器软件
SAILS机器人节文开发方便接受各种传感器配置所有组件都连接到I2C通信总线,由中心超光电Linux计算机管理超声波传感器 光传感器 指南针测高器视频摄像头加速计将安装到机上感应器配置可快速修改,多亏快速连接中心
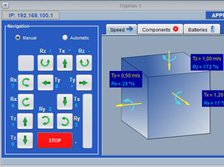
嵌入式控制软件有两种模式:自主操作或远程操作后一种模式允许用户命令位置(通过USB数字板),控制器然后尝试稳定自主模式目前基于反应行为两种自自动化算法先稳定自 己距离墙或楼层,边移动边避免阻塞使用从12个超声波传感器收集的数据,传感器检测范围为6米许多其他特定行为开发 触发响应机器人环境
职前性能和今后工作
SAILS原型在几个国家重大艺术活动期间展示:加拿大(魁北克文化博物馆)、比利时(Antwerpen时装博物馆)、法国(巴黎大宫)、俄罗斯(莫斯科温扎沃中心)和捷克共和国(布拉格工业宫)等他们还参加了数项教育活动。
未来开发包括增强arobat为戏剧性表演和公共事件修改软件以确保最大可靠性机内摄像头/机内控制实施,使机内机器人更好地了解伪绝对位置和麦克风以打开新的人际交互可能性






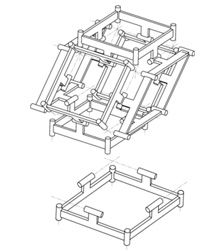
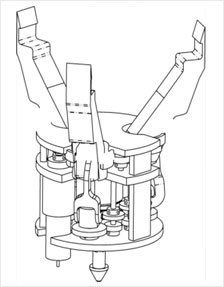
在一个框架内机械实施平面约束将十分困难。取而代之的是,建议从头开始新建机械工程,由美国专利覆盖7118442面部搭建为闭环平面链路 使用一组链路组成多边形侧链路通过角复位接头连接,关节轴直通由脸部构成的平面保证面部平面配置面部侧端通过复变接头连接,多希德龙边缘并交叉面部角接头因此,所有关节都关联到多希德龙顶端交叉需要指出的是,PAF建设只需要一种部件此外,对于边缘都长度相同的PAF系统,所有部件都完全相同
移动性
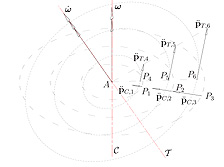
PAF的主要兴趣是它们的移动性其中一些结构僵硬,而另一些机制则显式变形并有良好的运动特性其中一些是局部移动式但全局僵化换句话说,他们只能移动初始配置运动链与这些属性相对稀有,常被称为摇摆不定以判断它们的移动性开发出多度自由 一般方法 包括约束方程的首创衍生并进行数值模拟观察弹性配置或查找不稳PAFs最终造造型由于塑料弹性清除关节,塑料模型比理论应变灵活结果,它允许观察摇摆PAF的伸缩性,而PAF在模拟中没有显著移动请注意,塑料模型运动范围受相邻部件间机械干扰的限制。

加速计数组背后的理论
Laval大学机器人实验室正在进行的工作最好归纳为它想回答的问题:
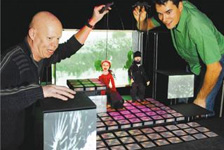
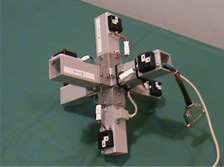
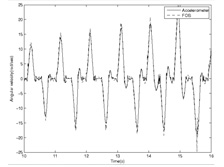
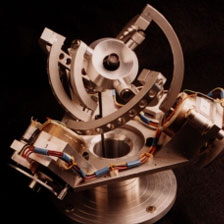
加速计阵列由纪尧姆福尼尔和菲利普加农搭建,他们是拉瓦尔大学机械工程系的2名学生。八元几何学(八元面像棋盘游戏中使用的某些骰子一样多元数组),该加速计阵列受洗十二倍数组矩形加速计(相片小黑盒)定位于正则八面体的每个顶点上纪尧姆和菲利普摇动加速计数组同时记录测量结果和附属参考磁传感器(图上小灰盒)后一传感器为OCTA六度自由置换提供参考纪尧姆和菲利普应用拉瓦尔大学机器人实验室开发算法从加速计测量中提取OCTA角速度并用时间划分磁移传感器估计数比较这些估计数所得结果样本见下图,从速率测量算出估计值接近磁移位传感器算出估计值
事实 据我们所知 这些都是从加速计中测出 最精确的角速估计这些结果大有希望,因为加速计比用于测量角速度的其他传感器便宜纪尧姆和菲力浦

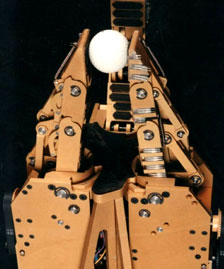

机器人手开发到此点, 并只在指针内有下作用指针用自有电机激活1998年MDA空间任务公司(前SPAR航空航天公司)与实验室联系,请求开发一只手供知名Cancarm使用新手所请求的规范之一是它应只由2个电机激活
引出指针下手原理开关指针只有一个电机控制事实上,一引擎就足够了,因为所有三大指头都不必独立闭合,因为所有指头将尽可能紧紧地抓取对象如果一只指环绕对象, 另一只指环接继续关闭直到所有指环都牢闭指间下作用是通过创新齿分机制实现的二级电机允许修改指针取向实现圆柱形、球形和平面抓取
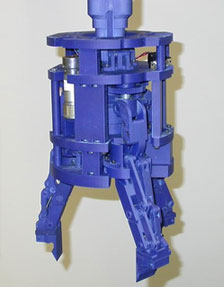
高低活化自适应-10DOF机器人手和2A自适应机器人辅助手新手略小点,重量仅为12DOF前置二分之二运动性相同,但仅由两台电机激活
SASAH手与加拿大空间局协作搭建设计由美国专利覆盖6 505 870 和等待产权组织专利当前版本改编成PDM国际空间站SPDM



软抓取器从SASAH手改编,它由机器人实验室开发并原设计用于空间SASAH手机中包括三根下动可定向指针,由二马达驱动为了满足废物复位任务的要求,重新设计了若干组件。除其他外,新抓载荷大得多并适应核环境同时,指尖设计可抓取封闭空间中的罐头,尚能处理各种对象新抓手塑料原型制作并成功测试

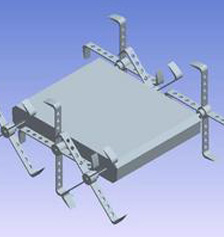
模型有2条腿,RRU和RUS类型,并装有座椅、控件和屏幕的一个被动钩子网双腿允许旋转环流,而平台上添加的电机则允许平台在平面正常分流范围为++60度







