- 提供配置文件
- 上头人形机器人类研究人形组件规范设计工作,开发专用硬件处理感官机控件,并设计软件框架,使人形机器人中富含感知机能集成
产品组合
人形综合平台
- 设计人形机器人时,我们希望人形能近似感知元件机器人应该能处理家庭环境 和各种对象和活动
自1999年以来,我们一直在综合视图下建设自主人形机器人,以便能够执行各种任务(而不仅仅是特定任务)。ARMAR数列(ARMAR-I、ARMAR-II、ARMAR-IIIa和ARMAR-IIIb)的机器人搭建支持抓取和扩展操作,学习人观察和自然人机器人交互
这一领域的研究活动包括人形组件的规范设计、开发专用硬件处理感官机控件以及设计软件框架等,这些框架使得人形机器人能集成感官机和电机能力丰富
ARMAR家庭
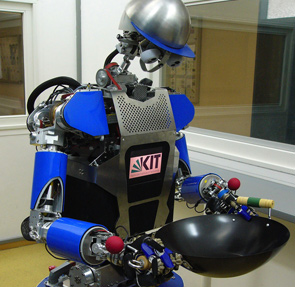
人形ARMAR机器人开发于协作研究中心588:人形机器人-学习合作多模式机器人2000年卡尔斯鲁厄首个人形机器人创建并命名ARMAR人类拥有二十五机械自由度由自主移动轮驱动平台组成,机体4DFs,2架人形冗余臂各7DFs,2架简单抓手和1架头3DFs
设计机器人ARMAR-IIIa机器人应该能处理家庭环境 和各种对象和活动ARMAR-IIIa完全集成自主类人系统中心共有43个DOF系统并配有位置、速度和强控传感器上半身设计成模块化和轻量化,同时保留相似大小和比例作为平均人移动平台允许horonomic运动两年后,略微改进人形机器人ARMAR-IIIb工程
卡尔斯鲁厄人头一贯用于ARMAR-IIIa和ARMAR-IIIb每一台都拥有两台摄像头对准视线宽角透镜和窄角透镜对顶视共7DFs系统(4脖子和3眼睛)、6个麦克风和6D惯性传感器全欧已有十本头版使用
-
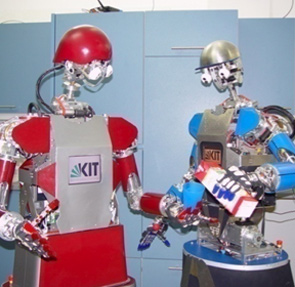
ARMAR-IIIb(左侧),2008年和ARMAR-IIIa
-

Armar3
-
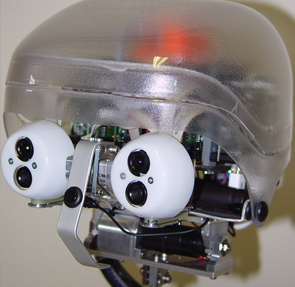
卡尔斯鲁厄人头
抓取并操纵
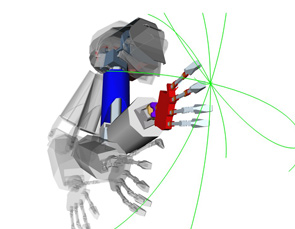
- 计划与执行抓取运动
裁剪和操纵允许人形机器人与其环境交互作用,因此,规划与执行抓取运动的核心部分对机器人每日环境应用非常重要。因此,我们正在研究方法 赋予人形机器人 如此不可缺能力开发综合应用程序以完成抓取操作三大任务:Grasp规划、解决冗余操作者反动学和规划免碰撞运动特别是,我们处理人类启发抓取规划、表示抓取动作和仿仿人抓取人形机器人等研究题目此外,我们正努力整合不同抓取相关方法,这些方法由协作者在研究社区开发,为人形机器人提供捕捉不同类已知和未知对象的能力自确定机器人免碰撞轨迹以来,必须快速可靠地完成,同时考虑环境变化规划免碰撞动作的方法使我们人形机器人能够用一只或双手抓住objcts,重抓对象并实现人工操作任务此外,我们正在研究综合运动规划方法,将规划抓取运动的三大任务合并成在线规划概念:寻找可行的抓法,解决反运动学并搜索配置空间免碰撞轨迹开发出更多多机器人规划器,允许同时执行合作抓取运动aporaches模拟和人形机器人ARMAR-III允许强力执行裁剪动作 视觉塞沃宁技术应用 精确定位手
-
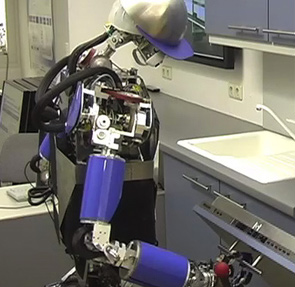
ARMAR-III打开洗碗机
-

ARMAR-III打开洗碗机
-
双工交互
学习人文观察
- 我们教机器人新任务的指导原则是从人类通过仿真学习新技能的方式中获取启发机器人模拟学习概念也称编程演示概念,即机器人观察人教官执行任务并在需要时仿真任务机器人编程依赖此范式 强工具加速学习 高度复杂运动系统,如人形机器人
研究领域的主要科学问题包括捕捉人类日常行为,建模和表示人类行为,学习低层次表示与学习高层次表示之间的联系,导致对不同背景的归纳化此外,我们正在研究如何合并仿真和探索单一交互范式,即仿真不单被用作搜索的起始点,用户继续密切参与获取新技能,评价机器人实验新解决方案或提供更多实例加速学习过程
-

学习人文观察
-
人运动识别
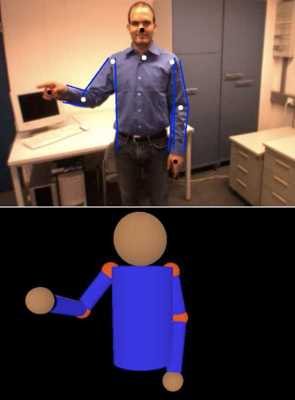
- 无标志人运动捕捉是仿真学习和机器人交互性的先决条件我们的研究侧重于实时立体法,使用典型人形机器人头立体摄像系统,其基线可与人眼距离相仿统计框架使用粒子滤波
上表出版物展示了我们方法的发展和进步,先从单目方法开始,后引入三维手头跟踪单向提示,并在最近的工作中纳入了反运动学、适应性肩姿势以允许模型更多弹性,以及优先合作提示聚合机制当前,我们可以实时捕捉人形机器人ARMAR-III头部3D人运动,用传统硬件处理速率20赫兹抓取轨迹用于在线复制
视觉
- 研究题目与机载机器人视觉相关 机载机器人是感知世界和嵌入式机器人 并适应变化环境当前,正在调查对象识别定位、自定位、视觉浏览和无标识跟踪方法和技术
此外,我们正在处理与使用主动视觉扩展感知机器人能力有关的研究问题运动式标定法卡尔斯鲁厄人头、开路和闭路控制策略结合数项任务研究,如织物搜索、视觉搜索和三维主动视觉
-

对象识别定位
- 对象识别和6-DOF配置估计是人形机器人最重要的感知能力之一精确估计识别对象是操作对象、抓取规划运动规划以及执行的先决条件我们的研究重点是开发实时物体识别方法,特别是精确配置应用估计值,使用典型人形机器人头立体摄像系统,基线可与人眼距离相仿
-
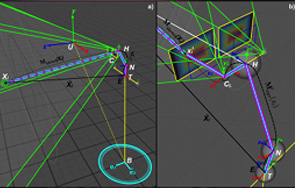
Self-Localization
- 人形基本感知能力如下:
- Self-Localization:通过主动立体视觉获取并跟踪人形定位
- 环境状态声明:解决全任务执行期间环境状况视觉查询
- se查询:环境元件6D布局
- 轨迹查询:动态变换的正确感知轨迹
-
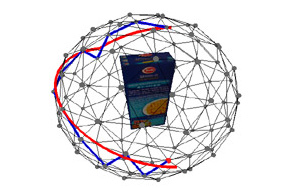
主动视觉对象搜索
- 对象表示式自发生成于五指手持有对象屏蔽对象的不同显见通过利用冗余臂探索对象根据贝叶斯滤波和聚变技术从手后分割为了减少所得视图数,我们调查解决方案以确定探索期间下一最佳视图
探索
- 面向人环境操作人形机器人应可自主获取环境知识、环境中遇到的物体及其物理体
这一领域的工作处理自感知感知信息与视觉信息整合问题,以获取未知对象丰度表示物,提高识别性能Haptic和视觉探索策略被调查引导机器人手沿潜在对象对象表面
此外,我们正在研究如何学习机器人几何和运动参数,以方便机器人物理特性改变时自动重校,尤其是终端效果器方面。
-
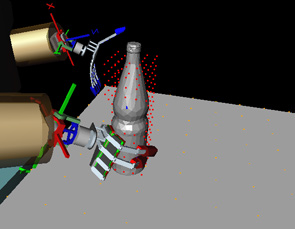
触摸式探索
- 除抓取外,还有兴趣从触摸式探索中识别对象因此,我们实施了一个视觉动态探索框架 用于从触摸式探索过程获取3D点集初始时,我们选择3D对象表示式超二次函数并进行实验以拟合探索数据未来研究中,我们将调查更多类型对象表示法,以适合对象分类、识别和生成抓取服
-
自探索机体Schema
- 以传统方式手对准几乎无法实现人类通过纯自探索成功解决问题,这导致生物启发机制适应机器人领域神经科学中常识显示 人体模式关联自感知感官信息联合配置,与可见体形并代表对当前状态的无意识认知














