- 提供配置文件
- 移动机器人实验室开发并原型实验移动机器人系统,包括创新移动机器人、避免阻塞系统、定位系统以及残疾人机器人辅助工具
产品组合
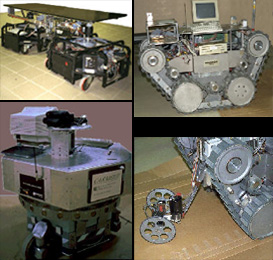
创新移动机器人
-

MDOF机器人
-
-
- UM多点自由飞行器完全面向全局性(可全方向旅行并同时旋转)。
- 唯一、专利兼容连接消化瞬时控制器错误以避免轮滑
- 从启动器故障恢复 :
- 车辆即使在电机、电源放大器或其他关键部件失效后也可以远程移动和控制
-

CLAPPER系统
-
-
- UM开发出一种新的偏差校正方法,该方法应用到UMMMDOF飞行器上,现命名为CLAPPER
- CLAPPER使用冗余编码器持续测量其两道卡车的相对位置和方向
- 每一卡车都可检测并纠正另一卡车的偏差
-

omniMate
-
-
- Oak Ridge国家实验室-需要高精度移动机器人实施他们的“移动映射器”项目
- ORNL发现没有商业机器人满足需求,而UM的CLAPER接近
- helpMate机器人公司UM建首商业CLAPER称OmniMate
-

OmniTread
-
- OmniTread蛇形机器人设计可穿行极难地形,如倒塌楼瓦砾
OmniTread也可以冲沙石它可以穿过小洞爬过高屏障
创新:
- 充气波束用于联合激活Bellows强健顺从并占用最小空间
- 最大覆盖方 所有段加宽移动轨迹
- 唯一充气控制法允许同时对僵硬度和联合角进行比例控制
- 驱动轴柱由中心段单电机驱动脊柱遍历所有段中心并对所有轨迹提供托盘
-

赛格威RMP
-
-
- DARPAMARS程序接收Segway机器人移动平台
- 塞格维RMP设备精密FLEXnav自知*定位估计系统
*)Propriotive指无外部引用
- 塞格威安装了避免阻塞能力
故障避免
-

CARMEL
-
- CARMEL是UM最老移动机器人自1987年
测试床开发VFH避免阻塞法
- VFH广泛使用
- VFH补偿超声波传感器误差
- VFH目前显示为最快避免阻塞法
-
EERUF系统
-
-
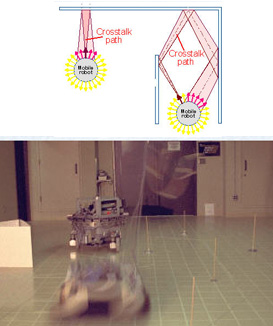
- 多声纳问题:一个传感器从其他传感器接收回声注册虚读取
- 系统大都等待很长时间后发射下一声纳++
- UM开发专利错误消除快速超声波开射
- EERUF声纳可快速点火,生成数据以四尺/秒速度避免阻塞
-

OmniNav
-
-
- OmniNav新方法为非点全向移动机器人提供屏障避免
- 问题比屏障避免近似机器人难
- UM目前正在调查基于多点VFH“act-on”方法的可行性
-

isleNav
-
-
- UM开发出一种新的方法通过狭窄通道导航移动机器人
- 关键需求:通道内出出出百分百免碰撞
- 难与声纳相遇的要求,因为脉冲反射和交叉跟踪引起误差读数
- UM解决方案基础如下:
- 优化传感器定位
- 仅精确线程用于转播读数
- 精确测距仅用于“是/否”决策
-
隐式移动机器人
-
- 1998年,我们把VFH/EERUF避免屏障技术移植到所谓的策略移动机器人上
- 在这个DARPA资助的项目中,我们开发出极可靠的避免阻塞方法,供在敌对环境中操作的移动机器人使用
-
微控件界面板
-
-
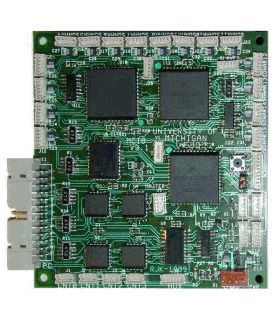
- 在TMR项目过程中发现小脚硬件实施EERUF方法对小移动机器人大有裨益
- EERUF等功能使用软盘大小板
- 由于其他移动机器人研究者强烈兴趣,我们通过商业渠道提供MCIB
-

难易避免测试台
-
-
- 内含计算机控制运动驱动四米线性运动表和固定板/图板表
- 对象(sostacles)可投向板/板表搭建的避免屏障传感器(如声纳)或反向
- 允许在完全受控动态条件下精确复制动态阻塞检测条件
- 唯一测试对象 很可能只有其中一种
移动机器人定位
-
UMB马克
-
- UM开发模型精度测试 移动机器人称UMBmark
- UM测试六种不同车辆配置
- TRCLABMate差分驱动
- 网络移动K2A同步驱动
- CLAPPERMDOF车
- 远程c Andros跟踪车
- Andros编码器拖车
- 智能编码器轨迹模拟
-

校准
-
- UM开发新法标定移动机器人
- 方法基础UMBmark
- 适用于差分驱动器(例如LabMate)。
- 减少系统误差一阶
- 方法可完全自动应用
- 方法测试并获得其他研究者确认
-

热量测定
-
-
- 其他问题:地面冲突或破解可造成重大偏差
- UM开发新方法来减少这些非系统错误
- 最近的UM开发 : 热量测量 。使用陀螺仪数据检测并纠正非系统错误
-
导航书籍
-
-
- 1994年ORNL请求报告移动机器人定位方法
- UM调查文献,咨询公司,并制作最全面的类调查,即“我在哪里”报告
- 由于其普遍重要性,UM报告如下:
-

热标定
-
- UM开发精准标定法
光学陀螺仪
图片描述 :
- Top:
Gyro标定:典型gyro输出错误
- 博托姆:
应用UM新校准法后错误减少多级数
-

高精度死回击系统
-
- HATRS密钥特征
- 工作轮或履带地面车辆
- 工程各种地形,包括崎岖倾斜
- 只需要主机电源连接和轮/轨编码器数据可选择性地系统使用从可变加码器获取的编码器数据,使其独立于主机车辆编码器
- 无GPS、计算机视觉、信标或任何其他外部引用工作,但可容纳并综合选外部GPS
- 漠不关心环境:室内、室外、城市或农村
- 小型并适合1/3打包机有效载荷海湾(rev.2开发中比小6.23x2.87x3.25英寸)。
- 设计最小电耗
- 输出JAUS兼容时间标XYZ
- Ethernet、WiFi、RF或远程RF数据调制解调器输出数据
- 不受极端操作温度或操作温度突变的影响
-

头人导航
-
-
- 目标 :
- 操作原理 :
- 头戴个人死回击系统
- 跟踪者有死回击能力(典型:IMU和Odo量度学)。
- 死回调制解调器
- 领先执行者方法同步两个死回调系统
- 期望性能 :
- 跟踪者引导符无限持续环境
- 跟踪者可能落后于领导2-60秒不需要直观观察
-

精密室内跟踪远程操作UGVs
-
-
- 目标 :
- 向远程操作者提供GPS相似视觉轨迹便利UGVs远程操作
- 操作原理 :
- 低成本陀螺与UGV内置odhoy
- 使用专利使用HDE消除所有陀螺错误效果方法,包括陀螺流
- 不需要GPS、RF信标或教程
- 性能 :
-

NASA火星漫游2009
-
-
- NASA资助的项目旨在开发高精度死回击系统
- 我们搭建Fluffy全功能半级克隆NASAFido类火星旋转器
- Fluffy应用了模糊逻辑专家规则导航法
- 优化FLEXnav系统以适应沙土上独特的轮滑条件
- 主体创新 :
轮滑检测和校正滑动监控
-

启发式稀释
-
-
- 多车辆跟踪系统使用GPS作为初级传感器和Gyro+odo度量法作为二级传感器后者帮助计算GPS停机时车辆位置
- 问题在于低廉陀螺仪高漂移率 导致几秒或分钟后 大标题误差
- 启发式稀释法估计yrro瞬时偏移基于测试并证明推理学,然后从gyro输出中去掉估计漂移法
- 结果是大幅下降有效流出,结果产生最高二级低头误差
- 人类发展报告完全不需要硬件小软件段可添加到现有程序代码中
- 人发报告与Gyro或IMU合作最有效使用低成本/高频陀螺仪
行人跟踪
-

室内行人跟踪
-
- 操作原理:脚架IMU
特征学
- 记录传递行人或爬虫位置
- 消除加速计滑动效应
- 使用专利缓冲漂移算法消除MEMS陀螺敏度对线性加速度和流
- Works with walking/jogging/crawling/skipping forward/backward/sideways/any direction.
性能显示
- 平均标题误差接近零
- 平均位置误差 <1%行走时距离 > 30分钟
- 平均高度误差: < 1m
-

门外行人跟踪
-
- 操作原理:脚架IMU
特征学
- 记录传递行人位置
- 不需要GPS
- 不需要信标或任何其他外部引用
- 消除加速计滑动效应
- 不需要用户专用标定*
- 记录流实时定位数据
性能显示
- 平均定位误差2里向上:~0.5%距离遍历
- 最大定位误差二里向上: < 40米
-

室内Segway跟踪
-
- 启发式增强ODEA消除内部结构环境使用odoID标题错误
特征:
- 不需要除轮子编码器以外的传感器
- 不需要信标或任何其他外部引用
- 实时工作 只需要20-30行C代码
- 提供无限持续时间和距离驱动器近零标题错误*
- 提供位置误差 <1%距离旅行*
机器人辅助残疾人
-

导航会长
-
-
- UM为严重残疾用户开发了Nav轮廓
- Nav教程避免故障解决了这些问题:
- 用户提供通向游戏杆旅行导航长跟踪此方向
- 遇有阻力时,Nav轮椅环游并尽量贴近用户指定方向
-

导航Belit
-
-
- 类似Nav轮椅方法,UM开发为盲人使用NavBelt
- UM避免阻塞使用
- Navabelt系统不向机器人控制器发布方向感应信号,而是生成声讯信号,通过耳机传递用户
- 导航Belit限制 :
- 需要数百小时培训后用户才能及时响应声提示,即使是慢行速
-

向导Cane
-
-
- 引导盲人有希望解决办法:UM使用超声波感应屏障避免
- 轮廓阻塞
- 用户即刻感知方向动作,然后由用户跟踪引导传感器头修改路径
- 指南Cane的主要长处
- 完全自动避免阻塞
- 完全直觉操作 完全不需要训练
- 组合odo度量数据、指南针数据并用陀螺仪数据维护定位信息





























