- 提供配置文件
- AMCEurope Ltd.,欧洲AVENCAD运动控制中心,Servo驱动解决方案和精密运动控制世界领先者,总部设在美国加利福尼亚州
ADVENCAD运动控件创建于1987年,目的是提供高质量servo放大器和驱动器,满足许多行业快速扩展自动化机器需求AMC焦点与客户合作开发并制作运动控制放大器和驱动器,从20W向48kW峰值投送
ADVENCED运动控件有许多标准产品可用,但也为OEMs定制产品提供满足需求的具体需求或特殊选项适配设计包括模拟和数字技术,覆盖广泛的解决方案新引进Digiflex-Scholip提供多构件能力、联网解决方案和备有可选软件库以缩短编程时间
产品组合
塞尔沃驱动器

性能显示
高性能Servo驱动器启动时优化调时速回路FlexPro和Digiflix性能servo驱动器很容易通过软件调适,包括流路、速度环路和定位环路axCentservo驱动器配置当前循环调试参数,这些参数适合大多数应用程序,但可使用传统调试方法进一步优化电源
servo驱动器范围从50W到2万W持续电量峰值评分通常比连续评分翻倍广选子80Vservo驱动器,这些驱动器最适合电池电源系统,如移动机器人和便携式设备,包括IMR、AMR、AGV、医学和实验室应用高电压servo驱动器可用从120VAC到480VAC并用等量DC电压覆盖大多数工业应用网络连通性
支持网络包括EtherCAT、Canopen、EtherNet/IP、RS485等机器很容易适应4.0和智能工厂,因为网络总线控制器可访问大多数servo驱动参数形状和大小
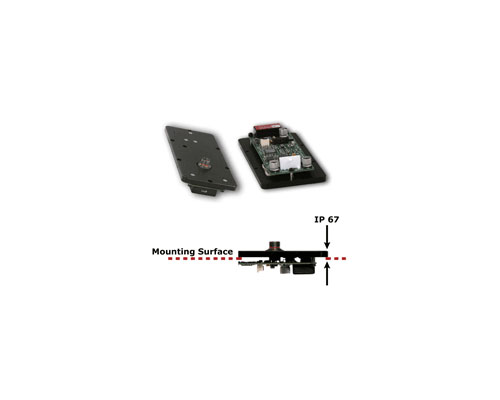
机器设计师很容易发现servo驱动器,面板山驱动器典型见工厂和工业环境, PCB山驱动器完美集成系统, 机器嵌入式设计则方便地混合两者不论形式因素如何,性能从不牺牲
模拟驱动器
-

100A40
-
- 面板挂载器 :经典
标注符
- 当前连续50码
- 当前峰值百元
- DC供应电压80-400
- 网络通信无
- 大小(mm)235x183.2x92.4
- 权值(g)3410
100A40面板servo驱动器目标集中控制并提供高带宽和快速响应时间
- 控制/COMMAND
++10V模拟
- 初级feback
Tachometer (±60 VDC)
- 操作模式
- 运动类型
单级化
-

120A10
-
- 面板挂载器 :经典
标注符
- 当前连续60码
- 当前峰值120DC
- 供电电压20-80
- 网络通信无
- 大小(mm)254x130.2x48.7
- 权值(g)1140
120A10面板Servo驱动器目标集中控制并提供高带宽和快速响应时间
- 控制/COMMAND
++10V模拟
- 初级feback
Tachometer (±60 VDC)
- 操作模式
- 运动类型
单级化
-

B30A40
-
- 面板挂载器 :AxCent
标注符
- 当前连续15
- 当前峰值30码
- DC供应电压60-400
- 网络通信无
- 大小(mm)203.2x142.9x40.7
- 权值(g)990
B30A40AxCentTM磁盘servo驱动器目标集中控制并提供高带宽和快速响应时间
- 控制/COMMAND
++10V模拟
- 初级feback
- 大厅
- 增量编码器
- Tachometer (±60 VDC)
- 操作模式
- 运动类型
-

B30A40AC
-
- 面板挂载器 :AxCent
标注符
- 当前连续15
- 当前峰值30码
- DC供应电压60-400
- AC供应电压45-265
- 网络通信无
- 大小(mm)203.2x165.7x103.1
- 权值(g)2230
B30A40ACAxCentTM磁盘servo驱动器目标集中控制并提供高带宽和快速响应时间
- 控制/COMMAND
++10V模拟
- 初级feback
- 大厅
- 增量编码器
- Tachometer (±60 VDC)
- 操作模式
- 运动类型
控制/COMMAND
- ++10V模拟
- 阶梯方向24V
- 编码器跟踪
- 索引慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
运动类型
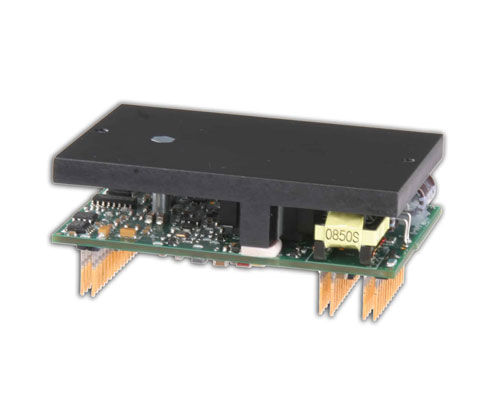
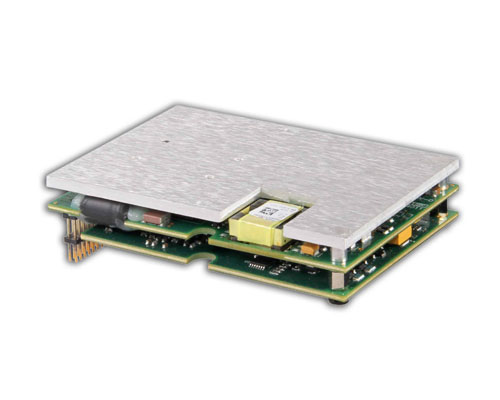
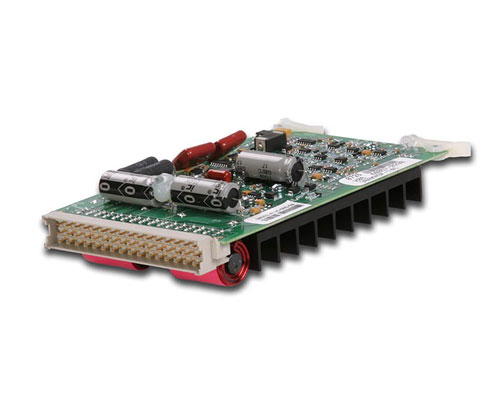
数字驱动器
-

DPRAHIE-030A800
-
- 面板挂载器 :digiFlex性能
标注符
- 当前连续15
- 当前峰值30码
- DC供应电压255-747
- AC供应电压200-480
- 网络通信ModbusRTU,RS-485/232
- 功能安全安全托盘脱机
- 大小(mm)300.5x231.3x91.4
- 权值(g)5437
DPRAHIE-030A800DigiFlex-Servo驱动板提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动器使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向24V
- 编码器跟踪
- 索引慢跑
- 网络PWM引导
- 顺序排列
初级feback
操作模式
运动类型
-

DPRAHIE-060A800
-
- 面板挂载器 :digiFlex性能
标注符
- 当前连续30码
- 当前峰值60码
- DC供应电压255-747
- AC供应电压200-480
- 网络通信ModbusRTU,RS-485/232
- 功能安全安全托盘脱机
- 大小(mm)300.5x231.3x140.91
- 权值(g)6165
DPRAHIE-060A800DigiFlex-Servo驱动器为分布式或集中式servo系统设计全调控制所有servo回路servo驱动器使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向24V
- 编码器跟踪
- 索引编译
- 慢跑
- 网络PWM引导
- 顺序排列
初级feback
操作模式
运动类型
-

DPRALTE-015B200
-
- 面板挂载器 :digiFlex性能
标注符
- 当前连续式7.5
- 当前峰值15
- DC供应电压网络通信模式RTU,RS-485/232
- 大小(mm)132.5x89.5x35.9
- 权值(g)486
DPRALTE-015B200DigiFlex-Servo驱动器为分布式或集中式servo系统设计所有servo回路全调控制servo驱动器使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- 顺序排列
初级feback
操作模式
运动类型
-

DPRALTE-020B080
-
- 面板挂载器 :digiFlex性能
标注符
- 当前连续10
- 当前峰值20码
- DC供应电压20-80
- 网络通信ModbusRTU,RS-485/232
- 大小(mm)132.5x89.5x35.9
- 权值(g)486
DPRALTE-020B080DigiFlex-Servo驱动板提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动器使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- 顺序排列
初级feback
操作模式
运动类型
-

DPRALTE-025B200
-
- 面板挂载器 :digiFlex性能
标注符
- 当前连续12.5
- 当前峰值25码
- DC供应电压20-190
- 网络通信ModbusRTU,RS-485/232
- 大小(mm)190.5x111.8x35.9
- 权值(g)872
DPRALTE-025B200DigiFlex-Servo驱动器为分布式或集中式servo系统设计全调控制servo驱动器使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- 顺序排列
初级feback
操作模式
运动类型
-

DPRALTE-040B080
-
- 面板挂载器 :digiFlex性能
标注符
- 当前连续20码
- 当前峰值40码
- DC供应电压20-80
- 网络通信ModbusRTU,RS-485/232
- 大小(mm)190.5x111.8x35.9
- 权值(g)872
DPRALTE-040B080diFlex-Servo驱动板提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动器使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- 顺序排列
初级feback
操作模式
运动类型
-

DPRALTR-015B200
-
- 面板挂载器 :digiFlex性能
标注符
- 当前连续7.5
- 当前峰值15
- DC供应电压40-190
- 网络通信ModbusRTU,RS-485/232
- 大小(mm)132.5x89.5x35.9
- 权值(g)486
DPRALTR-015B200DigiFlex-Servo驱动板提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动器使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- 顺序排列
初级feback
操作模式
运动类型
-

DPRALTR-015B200
-
- 面板挂载器 :digiFlex性能
标注符
- 当前连续7.5
- 当前峰值15
- DC供应电压40-190
- 网络通信ModbusRTU,RS-485/232
- 大小(mm)132.5x89.5x35.9
- 权值(g)486
DPRALTR-015B200DigiFlex-Servo驱动板提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动器使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- 顺序排列
初级feback
操作模式
运动类型
-

DPRALTR-025B200
-
- 面板挂载器 :digiFlex性能
标注符
- 当前连续12.5
- 当前峰值25码
- DC供应电压20-190
- 网络通信ModbusRTU,RS-485/232
- 大小(mm)190.5x111.8x35.9
- 权值(g)872
DPRALTR-025B200DigiFlex-Servo驱动板提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动器使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引慢跑
- 跨网络
- 顺序排列
初级feback
操作模式
运动类型
-

DPRALTR-040B080
-
- 面板挂载器 :digiFlex性能
标注符
- 当前连续20码
- 当前峰值40码
- DC供应电压20-80
- 网络通信ModbusRTU,RS-485/232
- 大小(mm)190.5x111.8x35.9
- 权值(g)872
DPRALTR-040B080diFlex-Servo驱动板提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动器使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- 顺序排列
初级feback
操作模式
运动类型
-

DPRANIE-030A800
-
- 面板挂载器 :digiFlex性能
标注符
- 当前连续15
- 当前峰值30码
- DC供应电压255-747
- AC供应电压200-480
- 网络通信ModbusRTU,RS-485/232
- 功能安全安全托盘脱机
- 大小(mm)300.5x231.3x91.4
- 权值(g)5437
DPRANIE-030A800DigiFlex-Servo驱动板提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动器使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
运动类型
-

DPRANIE-060A800
-
- 面板挂载器 :digiFlex性能
标注符
- 当前连续30码
- 当前峰值60码
- DC供应电压255-747
- AC供应电压200-480
- 网络通信ModbusRTU,RS-485/232
- 功能安全安全托盘脱机
- 大小(mm)300.5x231.3x140.91
- 权值(g)6165
DPRANIE-060A800DigiFlex-Servo驱动板提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动器使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
运动类型
-

DPRANIR-030A800
-
- 面板挂载器 :digiFlex性能
标注符
- 当前连续15
- 当前峰值30码
- DC供应电压255-747
- AC供应电压200-480
- 网络通信ModbusRTU,RS-485/232
- 功能安全安全托盘脱机
- 大小(mm)300.5x231.3x91.4
- 权值(g)5437
DPRANIR-030A800DigiFlex-Servo驱动板提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动器使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 编码器
- 后继
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
运动类型
-

DPRANIR-060A800
-
- 面板挂载器 :digiFlex性能
标注符
- 当前连续30码
- 当前峰值60码
- DC供应电压255-747
- AC供应电压200-480
- 网络通信ModbusRTU,RS-485/232
- 功能安全安全托盘脱机
- 大小(mm)300.5x231.3x140.91
- 权值(g)6165
DPRANIR-060A800DigiFlex-Servo驱动器为分布式或集中式servo系统设计全调控制所有servo回路servo驱动器使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
运动类型
-

DZCANTE-012L080
-
- PCB山:digiFlex性能
标注符
- 当前连续6
- 当前峰值12
- DC供应电压20-80
- 网络通信Canopen
- 大小(mm)63.5x50.8x18.4
- 权值(g)99.8
DZCANTE-012L080DigiFlex-SperceTMpcbservo驱动提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动程序使用CanopenQ通信程序,并委托DriveWareQi通过RS-232接口
控制/COMMAND
- ++10V模拟
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
- 插值定位模式
- 剖析模式
- 循环同步模式
- 当前位置
- 速率
运动类型
-

DZCANTE-020L080
-
- PCB山:digiFlex性能
标注符
- 当前连续12
- 当前峰值20码
- DC供应电压10-80
- 网络通信Canopen
- 大小(mm)63.5x50.8x22.9
- 权值(g)105
DZCANTE-020L080DigiFlex性能TMcbservo驱动器提供所有servo回路全调控并设计分布式或集中式servo系统servo驱动程序使用CanopenQ通信程序,并委托DriveWareQi通过RS-232接口
控制/COMMAND
- ++10V模拟
- 编码器跟踪
- 索引编译
- 慢跑
- 网络PWM引导
- 顺序排列
初级feback
操作模式
- 插值定位模式
- 剖析模式
- 循环同步模式
- 当前
- 位置定位
- 速率
运动类型
-

DZCANTE-025L200
-
- PCB山:digiFlex性能
标注符
- 当前连续12.5
- 当前峰值25码
- DC供应电压40-175
- 网络通信Canopen
- 大小(mm)76.2x50.8x22.9
- 权值(g)123
DZCANTE-025L200DigiFlexaceTMcbservo驱动器提供所有servo回路全调控并设计分布式或集中式servo系统servo驱动程序使用CanopenQ通信程序,并委托DriveWareQi通过RS-232接口
控制/COMMAND
- ++10V模拟
- 编码器跟踪
- 索引编译
- 慢跑
- 网络PWM引导
- 顺序排列
初级feback
操作模式
运动类型
-

DZCANTE-060L080
-
- PCB山:digiFlex性能
标注符
- 当前连续30码
- 当前峰值60码
- DC供应电压10-80
- 网络通信Canopen
- 大小(mm)76.2x50.8x22.9
- 权值(g)123
DZCANTE-060L080DigiFlex-SperceTMpcbservo驱动提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动程序使用CanopenQ通信程序,并委托DriveWareQi通过RS-232接口
控制/COMMAND
- ++10V模拟
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
- 插值定位模式
- 剖析模式
- 循环同步模式
- 当前
- 位置定位
- 速率
运动类型
-

DZEANTU-020B080
-
- PCB山:digiFlex性能
标注符
- 当前连续10
- 当前峰值20码
- DC供应电压18-80
- 网络通信EtherCATDxM技术
- 功能安全安全托盘脱机
- 大小(mm)88.9x63.5x20.1
- 权值(g)126
DZEANTU-020B080DigiFlex性能TMcbservo驱动提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动使用EtherCATQ通信
控制/COMMAND
- ++10V模拟
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- 顺序排列
初级feback
- ++10VDC位置
- sine/Cosine编码器
- ssC模式
- EnDat#2.1
- EnDat2.2大厅
- hiperface
- 增量编码器
- 破解计
操作模式
运动类型
-

DZRALTE-012L080
-
- PCB山:digiFlex性能
标注符
- 当前连续6
- 当前峰值12
- DC供应电压20-80
- 网络通信ModbusRTU,RS-485/232
- 大小(mm)63.5x50.8x18.4
- 权值(g)99.8
DZRALTE-012L080DigiFlex-SperceTMpcbservo驱动提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动程序使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
运动类型
-

DZRALTE-020L080
-
- PCB山digiFlex性能
标注符
- 当前连续12
- 当前峰值20码
- DC供应电压10-80
- 网络通信ModbusRTU,RS-485/232
- 大小(mm)63.5x50.8x22.9
- 权值(g)105
DZRALTE-020L080DigiFlex-SperceTMpcbservo驱动提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动程序使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
- ++10VDC位置
- 大厅
- 增量增量
- 编码器
- 破解计
操作模式
运动类型
-

DZRALTE-025L200
-
- PCB山:digiFlex性能
标注符
- 当前连续12.5
- 当前峰值25码
- DC供应电压40-175
- 网络通信ModbusRTU,RS-485/232
- 大小(mm)76.2x50.8x22.9
- 权值(g)123
DZRALTE-025L200DigiFlex-SperceTMpcbservo驱动器提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动程序使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引编译
- 慢跑
- 网络PWM引导
- 顺序排列
初级feback
操作模式
运动类型
-
DZRALTE-040L080
-
- PCB山:digiFlex性能
标注符
- 当前连续20码
- 当前峰值40码
- DC供应电压10-80
- 网络通信ModbusRTU,RS-485/232
- 大小(mm)76.2x50.8x22.9
- 权值(g)123
DZRALTE-040L080diFlex-SperceTMpcbservo驱动提供所有servo回路全调控制并设计分布式或集中式servo系统servo驱动程序使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
运动类型
-

DZRALTE-060L080
-
- PCB山:digiFlex性能
标注符
- 当前连续30码
- 当前峰值60码
- DC供应电压10-80
- 网络通信ModbusRTU,RS-485/232
- 大小(mm)76.2x50.8x22.9
- 权值(g)123
DZRALTE-060L080diFlex-SperceTMpcbservo驱动器提供所有servo回路全调控制程序,设计面向分布式或集中式servo系统servo驱动程序使用RS485或modbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
运动类型
-
DZSANTU-020B080
-
- PCB山:digiFlex性能
标注符
- 当前连续10
- 当前峰值20码
- DC供应电压18-80
- 网络通信DxM技术
- 功能安全安全托盘脱机
- 大小(mm)88.9x63.5x20.1
- 权值(g)124
DZSANTU-020B080DigiFlex-SperceTMpcbservo驱动提供所有servo回路全调控制并设计分布式或集中式servo系统DZSANTUservo驱动器设计成EtherCATQETU网络子节点使用,必须与DZEANTU节点并用驱动程序使用dxMTM技术并委托DriveWare
控制/COMMAND
初级feback
- ++10VDC位置
- sine/Cosine编码器
- ssC模式
- EnDat#2.1
- EnDat2.2
- 大厅
- hiperface
- 增量编码器
- 破解计
操作模式
运动类型
-

DZXCANTE-008L080
-
- PCB山:digiFlex性能
标注符
- 当前连续4
- 当前峰值8
- DC供应电压10-80
- 网络通信Canopen
- 大小(mm)63.5x50.8x22.9
- 权值(g)105
DZXCANTE-008L080DigiFlexTM扩展环境cbsorve驱动器提供所有servo回路全调控制程序,设计面向高温或崎岖环境中分布式或集中式servo系统servo电机驱动程序使用CanopenQ通信程序,并委托DriveWareQS通过RS-232接口使用
控制/COMMAND
- ++10V模拟
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
- 插值定位模式
- 剖析模式
- 循环同步模式
- 当前
- 位置定位
- 速率
运动类型
-

DZXCANTE-015L080
-
- PCB山:digiFlex性能
标注符
- 当前连续7.5
- 当前峰值15
- DC供应电压10-80
- 网络通信Canopen
- 大小(mm)63.5x50.8x22.9
- 权值(g)105
DZXCANTE-015L080DigiFlexTM扩展环境cbsorve驱动器提供所有servo回路全调控制程序,设计面向高温或崎岖环境中分布式或集中式servo系统servo电机驱动程序使用CanopenQ通信程序,并委托DriveWareQS通过RS-232接口使用
控制/COMMAND
- ++10V模拟
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
- 插值定位模式
- 剖析模式
- 循环同步模式
- 当前位置
- 速率
运动类型
-

DZXCANTE-040L080
-
- PCB山:digiFlex性能
标注符
- 当前连续20码
- 当前峰值40码
- DC供应电压10-80
- 网络通信Canopen
- 大小(mm)76.2x50.8x22.9
- 权值(g)123
DZXCANTE-040L080DigiFlexTM扩展环境cbsorve驱动器提供所有servo回路全调控制程序,设计面向高温或崎岖环境中分布式或集中式servo系统servo电机驱动程序使用CanopenQ通信程序,并委托DriveWareQS通过RS-232接口使用
控制/COMMAND
- ++10V模拟
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
- 插值定位模式
- 剖析模式
- 循环同步模式
- 当前
- 位置定位
- 速率
运动类型
-

DZXRALTE-008L080
-
- PCB山:digiFlex性能
标注符
- 当前连续4
- 当前峰值8
- DC供应电压10-80
- 网络通信ModbusRTU,RS-485/232
- 大小(mm)63.5x50.8x22.9
- 权值(g)105
DZXRALTE-008L080DigiFlex-Servo载运扩展环境pcb全调控所有servo回路并设计为高温或崎岖环境中分布式或集中式servo系统servo电机驱动器使用RS485或MedbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
运动类型
-

DZXRALTE-015L080
-
- PCB山:digiFlex性能
标注符
- 当前连续7.5
- 当前峰值15
- DC供应电压10-80
- 网络通信ModbusRTU,RS-485/232
- 大小(mm)63.5x50.8x22.9重(g)105
DZXRALTE-015L080DigiFlexTM扩展环境cbsorve驱动器提供所有servo回路全调控制程序,设计面向高温或崎岖环境中分布式或集中式servo系统servo电机驱动器使用RS485或MedbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
运动类型
-

DZXRALTE-040L080
-
- PCB山:digiFlex性能
标注符
- 当前连续20码
- 当前峰值40码
- DC供应电压10-80
- 网络通信ModbusRTU,RS-485/232
- 大小(mm)76.2x50.8x22.9
- 权值(g)123
DZXRALTE-040L080DigiFlex-Servo驱动器扩展环境pcbservo电机驱动器使用RS485或MedbusRTU通信并委托DriveWare
控制/COMMAND
- ++10V模拟
- 阶梯方向5V
- 编码器跟踪
- 索引编译
- 慢跑
- 跨网络
- PWM方向
- 顺序排列
初级feback
操作模式
运动类型
运动控制
性能显示
ApVENCED运动控件 我们的目标是制作servo驱动器 与尽可能多的控制器兼容EtherCAT、Canopen、Powerlink这使你和其他系统设计师可以自由选择各种控制器而不锁定任何特定制造商
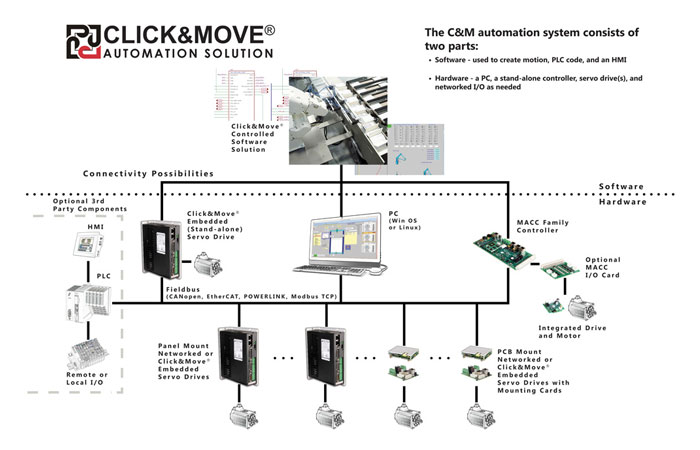
点击并移动自动化软件求解

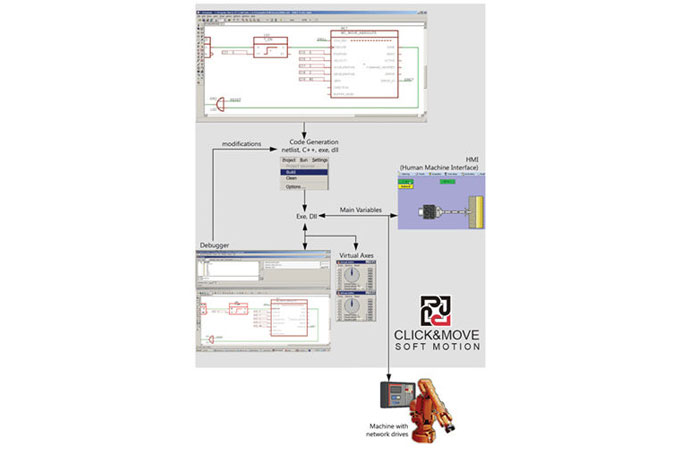
- C&M为OEMs系统集成器设计自动化求解可包括运动控制、PLC逻辑、局部I/O和联网I/O应用简单单轴并最小I/O对复杂多轴实时运行
点击移动系统由软件构件组成,用于创建逻辑 HMI和运动剖面和硬件构件,如控制器、servo驱动器和i/O设备
-
点击并移动快速事实
-
-
- 组合运动、PLC和HMI控件
- PLCopen基础工业控制编程全局标准
- Canopen、EtherCAT和POWERLINK网络协议
- IEC 61131-3完全兼容使用图形函数块图
- 多平台支持:PC(WinOS和Linux)、单机控制器MACC和ADVENCAD运动控制驱动
-
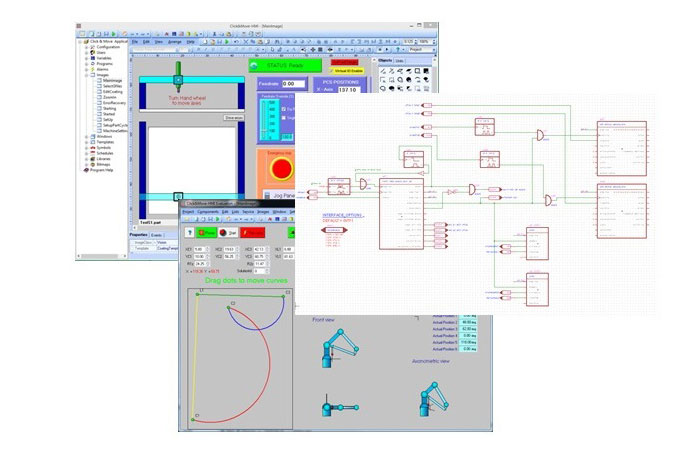
集成设计环境
-
- C&M综合开发环境为用户提供程序设计环境
- 运动控制
- PLC机控
- G编码文件处理cNC应用
- 进程控制
- 机器人学
IDE由图形创建/编辑函数块图基础逻辑图学和HMI屏幕应用码、调试应用码、整理归档应用码、合并比较代码以及构建/编译状态自动化等应用组成
从何开始
HMI需求:HMI表示用户界面控件用户使用此程序与系统实时交互
FBD需求:FBD功能块图代表运动和逻辑行为
视项目或工作风格而定,用户可能想从两个端开始归根结底取决于他们
-
HMI
-
- 点击运动收集运动控制、实时计算和人界面等数方面点击运动所建HMI完全可定制HMI屏幕可简单化像启动/停止按钮并读出驱动状态
或可完全操作控制屏,用户可输入命令、启动并禁用单个servo驱动器、显示系统信息、调整参数甚至显示运动系统动态图形并实时更新只要从函数块图中拉取值,HMI可显示用户选择的任何数据
编辑器用模板创建按钮、字段和其他元素,用户很容易启动用户甚至可以嵌入图像并改变元素颜色和大小,使其HMI完全照样处理
- 函数块图处理运动、PLC函数和I/O行为
- 实时外壳处理编译运动程序与FieldBus和HMI通信
- 虚拟轴或实轴选择基于XML文件配置
- HMI显示直播信息并实时操作改变变量
-
MC块和G-Code
-
-
- 努力保持进化运动控制标准允许内置知识库
- 层抽象解析部分编程设计题
- PLCopen手册在C&M内分发
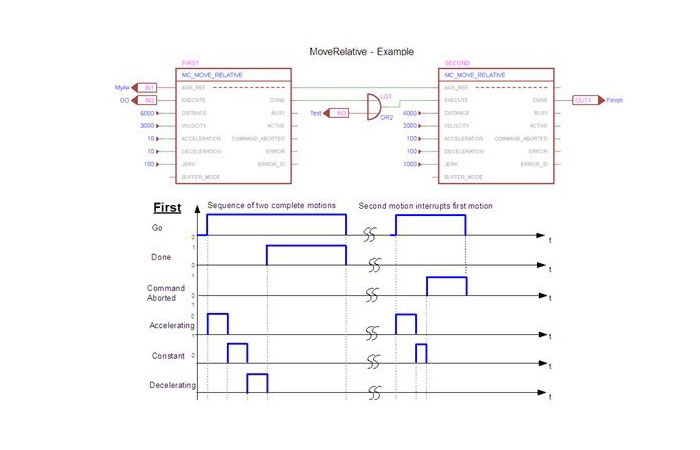
- 协调运动特征遵循PLCopen标准
- G-Code处理
-
调试
-
-
- PLCopenFBD语言应用编程
- 开发过程完全可以在用户PC内展开
- 虚拟轴运动模拟
- 虚拟轴项目可用技术支持打包交换
- 完全数字开发系统帮助支持过程虚拟轴比实轴更容易移植
- 调试工具:图形化和文本化
- 集成HMI
- 内容广泛的内置帮助-教程、演示文摘、白文论文等
- 广示例应用
-
求解架构
-
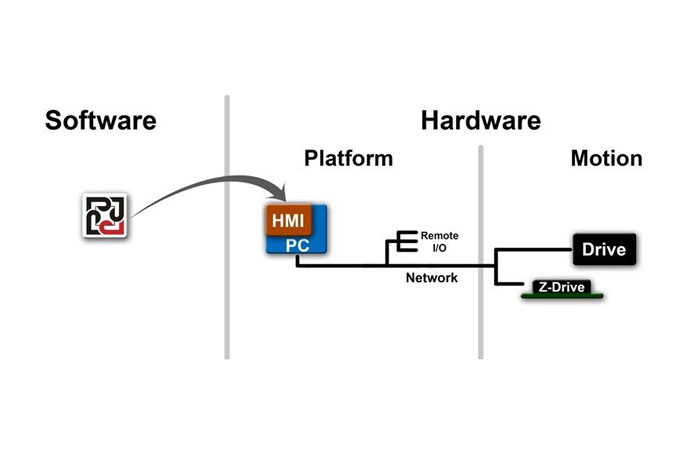
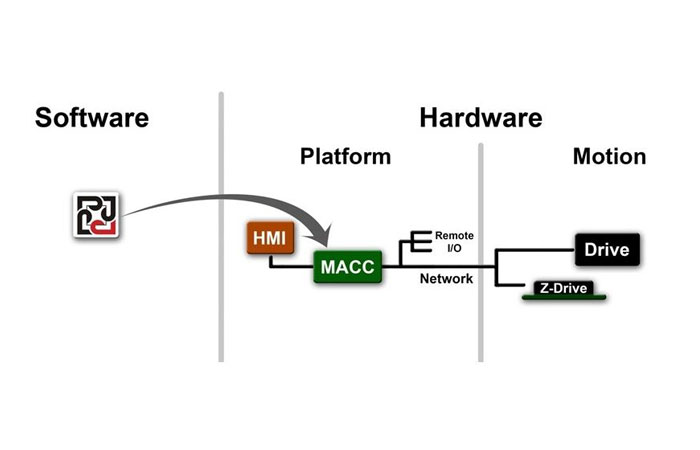
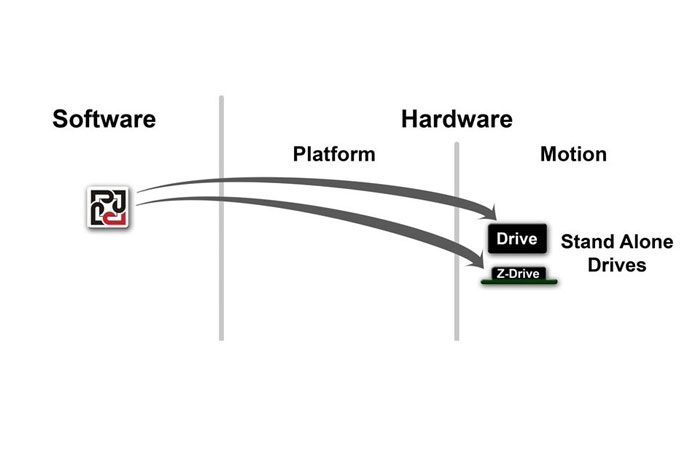
- 点击和运动系统可以千方百计组合,但大多数架构都遵循三大结构之一优先方法取决于应用
PC基础
C&M开发软件用于创建运动代码、PLC逻辑和用户界面屏幕代码编译目标PC平台并下载Servo驱动器和i/O通过网络连接PC平台
PC基础架构显然最适合操作期间与系统连接是可行的应用,如工业机器、栅格和其他基本静止设备等也是所有系统首选架构 拥有超过8个运动轴
-
运动自动化控制卡
-
- 运动自动化控制卡(MACC)是一个通用运动/导航控制器,嵌入式点击和运动能力在此假设中,代码编译MACC平台并下载servo驱动器和i/O通过网络连接MACC平台可选择通过机上HDMI连接器组成单独的HM屏幕
MACC解决方案对AGV等移动应用大有帮助,但也可以比PC基础架构高成本效益替代8轴或更少应用ACC还最适合数字和模拟servo驱动器组合应用
-
塞尔沃驱动器嵌入式
-
- ADVENCAD运动控件提供数字驱动器,设计这些驱动盘存储并运行嵌入式C&M程序C&M开发软件用于创建运动代码和PLC逻辑代码编译目标驱动平台并下载I/O本地驱动
servo驱动接收计算工作,否则留待PC或单机控制器处理,节省空间和金钱
简单强求小应用但它主要最佳地用于单轴应用
电源源
-

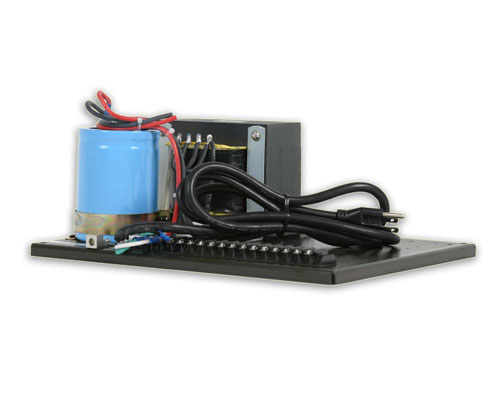
PFC2400W375
-
- 标注符
- 输出电压375
- 当前连续6.4
- 定速电源连续2.4
- AC供应电压120 240
- AC输入阶段一号
- 附加特征权因子校正,改制,内建分块控制器
PFC2400W375受管DC电源校正
-

PS16H120-L
-
- 标注符
- 输出电压120
- 当前连续7
- 定速电源连续0.8
- AC输入阶段一号
- 附加特征隔离区
PS16H120-L使用隔离变压器不受管电源
-

PS16H160
-
- 标注符
- 输出电压160 当前连续5
- 定速电源连续0.8
- AC输入阶段一号
- 附加特征隔离区
PS16H160无节制供电并配有隔离变压器
-

PS16H30-L
-
- 标注符
- 输出电压30码
- 当前连续27号
- 定速电源连续0.8
- AC输入阶段一号
- 附加特征隔离区
PS16H30-L使用隔离变压器不受管电源
-

PS16L120-L
-
- 标注符
- 输出电压120
- 当前连续7
- 定速电源连续0.8
- AC输入阶段一号
- 附加特征隔离区
PS16L120-L是一个配有隔离变压器的无节制电源
-
PS16L60
-
- 标注符
- 输出电压60码
- 当前连续13
- 定速电源连续0.8
- AC输入阶段一号
- 附加特征隔离区
PS16L60无节制电源配有隔离变压器
-

PS300H24
-
- 标注符
- 输出电压24码
- 当前连续12
- 定速电源连续0.3
- AC输入阶段一号
- 附加特征隔离区
PS300H24无节制供电并配有隔离变压器
-

PS300W170
-
- 标注符
- 输出电压170
- 当前连续15
- 定速电源连续2.55AC
- 输入阶段一号
PS300W170非隔离无节制电源
-

PS30A
-
- 标注符
- 输出电压340
- 当前连续15
- 定速电源连续10.1
- AC输入阶段3
- 附加特征内置阵容管理器,内置阵容
PS30A非隔离无节制电源
其它存取器
-

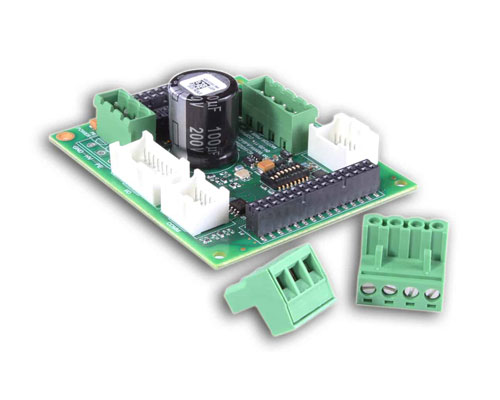
挂牌MC1XAZ01
-
- 家族化 :AxCent
- 大小(mm)101.6x71.9x15.7
- 权值(g)58.3
- 当前峰值25码
MC1XAZ01安装卡设计用于持有AxCentTM家庭cbservo驱动器以简化连接控制器、电机和反馈
-
挂牌MC1XAZ02
-
- 家族化 :AxCent
- 大小(mm)38.1x38.1x16.2
- 权值(g)11.3
- 当前峰值10
MC1XAZ02安装卡设计用于持有微量AxCentTM家庭cbservo驱动器以简化连接控制器、电机和反馈
-
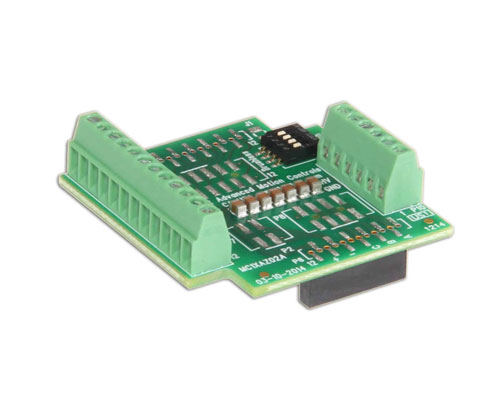
挂牌MC1XDZC03-QD
-
- 家族化 :digiFlex性能
- 大小(mm)63.5x76.2x25.4
- 权值(g)50.7
- 网络通信Canopen
- 当前峰值25码
MC1XDZC03-QD安装卡设计用于持有DZCANTE或DZXCANTEDiclexFLETT家庭cbservo驱动器以简化连接控制器、电机和反馈电源连接器使用快速分解样式连接
-

sunt监管 SRST175
-
- 标注符
- Clamping电压175
- 率分解能力95
- 大小(mm)203.2x108.0x66.70
- 权值(g)385
SRST175分流调控器在再生或电压波动期间阻塞175VDC的供应电压
-

sunt管理器SRST380
-
- 标注符
- Clamping电压380
- 率分解能力190大小(mm)203.2x108.0x66.70
- 权值(g)385
SRST380分流调节器在再生或电压波动期间阻塞向380VDC的供应电压
-

sunt监管SRST50
-
- 标注符
- Clamping电压50码
- 率分解能力95
- 大小(mm)203.2x108.0x66.70
- 权值(g)385
SRST50分流调节器在再生或电压波动期间阻塞向50VDC的供应电压
-

连接器KC-23AMPSEAL01
-
- 家族化 :AxCent
KC-23AMPSEAL01配方连接器包提供连接器嵌套、插座连接器插件和密封插件参考配方连接器包数据表兼容servo驱动
-

连接器KC-MC1XDZ02
-
- 家族化 :digiFlex性能
KC-MC1-XDZ02配方连接器包提供配方连接器寄存器和叉针参考配方连接器包数据表兼容安装卡
-

连接器KC-MC1-XFE01
-
- 家族化 :FlexPro
KC-MC1-XFE01交配连接器包提供表层连接器和机上空间器参考配方连接器包数据表兼容servo驱动模型
-
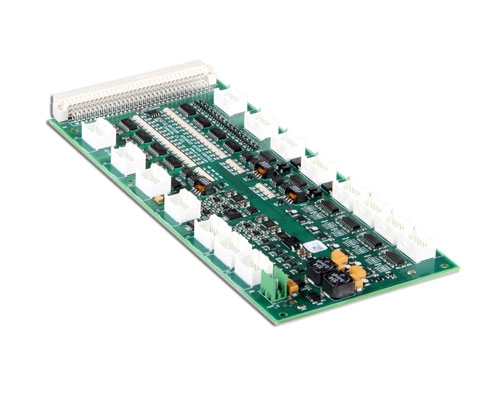
ACCI/O董事会
-
- 标注符
- 大小(mm)219.96x9995x13.60
- 权值(g)153
MACCIO1模块拥有必要的数字模拟I/O支持四种当前模式servo驱动器++10V模拟命令输入可使用机载MACCFPGA硬件资源以及ClickDove软件开发环境软件资源构建高成本效益高性能运动控制系统
- 816位模拟输入
- 816位数字输入
- 16位点对数字输入
- 16位偶数输出
- 2x4隔离高速RS422差分输出
- 4个隔离高速RS422差分输入
- 4增量或EnDat2.0编码输入器
-
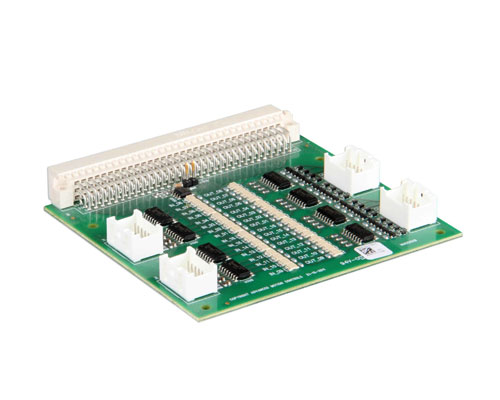
ACCI/O董事会MACCIO2
-
- 标注符
- 大小(mm)99.9x800x11.5
- 权值(g)53.9
MACCIO2模块对简单应用使用开关输入设备LEDS或小信号中继输出
-
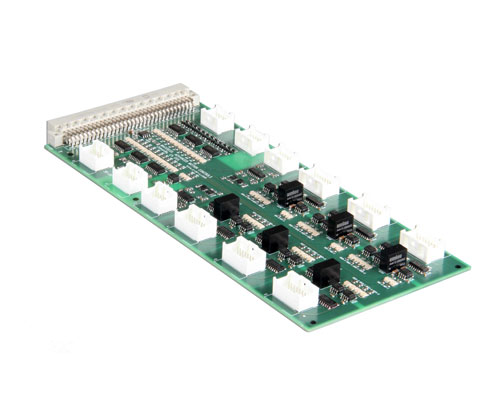
ACCI/O董事会MACCIO3
-
- 标注符
- 大小(mm)219.96x99.95x11.04
- 权值(g)127号
MACCIO3模块内含有支持最多六位模式servo或steper驱动器的必要数字I/O输入Step/Dir命令可使用机载MACCFPGA硬件资源以及ClickDove软件开发环境软件资源构建高成本效益高性能运动控制系统
- 12元数字输入2高速差分数字输入
- 12位偶数输出
- 12高速RS422差分数字输入2-轴
- 24高速RS422差分数字输出
- 4个独立的编码器输入支持编码器或手轮
-
滤卡BFC10010
-
- 标注符
- 当前连续10
- 引文(行对行)二百
- 大小(mm)71.0x50.6x25.0
- 权值(g)210
BFC10010滤波卡提供附加推理满足最小推理要求并减少PWM切换噪声三相电机使用
-

滤卡BFC1010
-
- 标注符
- 当前连续10
- 引文(行对行)20码
- 大小(mm)56.5x28.6x15.8
- 权值(g)37号
BFC1010滤波卡提供附加推理满足最小推理要求并减少PWM切换噪声三相电机使用
-
滤卡BFC15030
-
- 标注符
- 当前连续30码
- 引文(行对行)300
- 大小(mm)134.6x113.7x43.5
- 权值(g)1430
BFC15030滤波卡提供附加推理满足最小推理要求并减少PWM切换噪声三相电机使用
自定义Servo驱动器和存取器

- 令我们与竞争者相分离的事物之一是,我们愿意制作修改定制servo驱动器和其他产品自始即制作定制servo放大器今日,占业务的三分之一修改后的产品构成另外三分之一
开发定制servo驱动器时, 我们与他们密切合作 给他们一个servo解决方案可包括创建驱动器,这些驱动器有不同的连接器、形状、轴数以及其他特征修改Servo求解选项
ADVENCED运动控件提供现成产品包括各种权势、性能和设计考虑然而,有时对标准产品稍作微小调整可能有利于使事物完全适合特定应用,而无需投资全习惯解决办法。修改式解决方案可快速实现并大大提高机器性能最优,我们会为你做
多年来,ApVENCAD运动控件乐于制作并销售我们现成Servo驱动产品改版改型servo驱动器约占业务量的三分之一微小修改保证每个人都能得到量身定制的解决方案
简单修改后,单位成本可接近标准产品等值量上升后差小同时,有些选项可能实际使修改设计成本低于标准举例说,有些客户喜欢没有servo驱动覆盖的单元,从而降低物料成本
-

修改后产品和选项实例
-
-
- 教程专用机器
- 增益调整
- 当前限值和电荷限值
- 温度、震荡和IP考量
- 复合编译
- 丝绸屏幕布局
- 倒置hibit逻辑
- 快速断开 多多
-
自定义Servo求解选项
-
- ADVENCAD运动控件大赛推送和变换产品销售能力,但某些运动控件应用需要与现成模型大不相同感恩地说,ApVentAD运动控件可迅速开发并交付批量请求OEMs专用产品
它可以从疯狂思想、特征爬虫或近似不可能规范开始,但有时你只需要从头开始开机新设计提供无限可能性,使设计师扩展能力超出servo驱动函数,包括外围构件完全集成
-

非常规形状
-
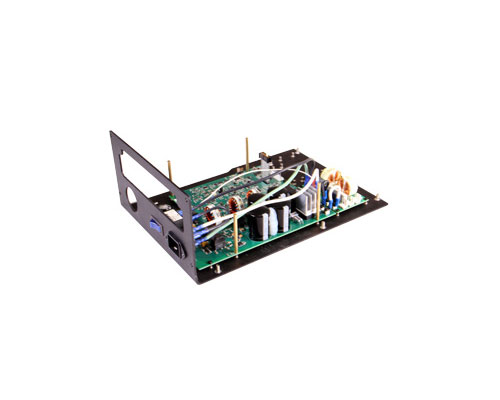
- 与其把方形嵌入圆洞,何不找到合用套件运动控制应用在电子空间上可能非常有限,这意味着可能没有标准servo驱动空间定制servo驱动器可在此必不可缺我们交付所有自定义驱动器形状,包括综合到电机背面的圆驱动器
问题不总是变矩形圆圈或减少足迹和牺牲高度
-

多轴
-
- 个体servo驱动器通常只用于驱动一电机和一电机多应用程序多电机并发与其使用多轴驱动器,不如使用自定义多轴servo驱动器,可同时控制多马达
多轴设计小于部件总和,因为它们减少冗余函数和组件并利用板布局
-
集成驱动器控件
-
- 以制造servo驱动器和控制器为傲,但两者同时并举如何?驱动器和控件可合并并打包成单单元,而不是用线和电缆连接servo驱动器和控制器
综合解决方案大大简化供应管理,缩短装配时间,保存空间并增强可靠性此外,像多轴servo驱动器,它可以合并多轴控制单单元
-

专用网络选项
-
- 目前ApenceD运动控件已有标准产品支持EtherCAT、Canopen、Ethernet/IP、EthernetTCP、EthernetPOWERLINK、ModbusRTU/TCP和RS-485232任何网络都可应用到定制产品中技术经验为更多网络创建定制驱动器,如ProfinetRT、ProfinetIRT、Profibus和SERCOS III海关甚至可以为拓展标准网络提供铺路
-

环境考量
-
- 当我们拥有扩展环境驱动线时,有时你需要特殊的东西我们所有扩展环境特征和修改都可应用到定制产品中,有时甚至更大程度地应用到定制产品中。举例说,我们制作定制servo驱动器 可以在100摄氏度以上环境温度下安全操作超出标准扩展环境产品容量
-
唯一能力
-
- 需要比标准开销更多电流驱动器自定义性需要比平时多I/O端口驱动自定义性需要带特殊安全特征的驱动器吗自定义性需要驱动器分享它与设备相框自定义性需要磁编码器或无接触反馈自定义性
实例
- 不只是聊天,我们走步多年以来,我们制作数以百计定制和修改servo驱动模型这里我们只有小小数 供你退房
-
高压Servo驱动
-
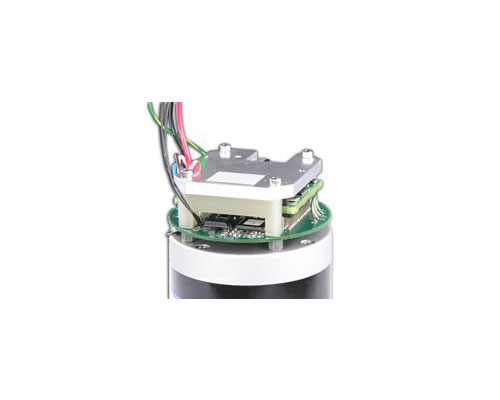
- servo驱动器用于控制水下摄像头 深度为6000米以标准解决方案之一为基础, 并加几密钥修改, 允许它在这个应用中工作
- 设计上挂电机尾
- 废代代电容和其他构件,不因强压压压
- 自定义基板
- 嵌入旋转磁模块替换传统Hall传感器和编码器反馈
- 配置控件驱动速度模式操作 主控器关闭定位环路
-

双轴Servo驱动
-
- 其中有2个驱动器同时用于控制军用遥控飞行器的踏脚和肘关节建立每个驱动器是为了控制一肘接头和一叉接头,而不是用双轴接字和双轴接字和双肘接头以这种方式,独有部件数目减少,易替换
- 无开关或强力计
- 任务周期模式运维
- Axis#1:30A峰值,24A连续
- Axis#2:30A峰值20A连续
- 自定义操作电压
- 指定的峰值当前持续时间
- 指定的I/O连接器
- 专用电机和主电源连接器
- 复合涂层
- 基础板集成控制盒覆盖
-

双轴Servo驱动
-
-
- 基础板形状匹配自定义挂载
- 动态制动中继机停机
- 指定的连接器
- 搭建电机兼容性教程
- +/3V命令范围
- 特殊访问调值
- RTV应用到组件休克/振荡
- 复合涂层
- 自定义标签
- 在收到规格后不到2个月交付
-

当前高输出驱动
-
-
- 70A峰值流
- 7A连续流
- 80khz交换频率
- 自定义电压范围
- PWM指令
- 任务周期模式指定连接器
- 基础板流系统积分
-
超高性能驱动
-
-
- 5khz波段
- 最大相位差实现系统稳定
- 无开关或强力计
- 3U回架
-
极端环境驱动
-
- 驱动器控制军用遥控车抓爪
- MIL特征连接器保有IP67内外部封印,同时允许通信和电源驱动
- 扩展温度范围
- 复合涂层
- USB接口通信并命令客户现有通信硬件
- 高功率DC/DC转换器由客户指定
-

自定义值吗
-
- 寻找定制解决方案总值不值 特别是有方法实现标准产品所有习惯都不同, 所以我们必须逐例处理然而,我们仍可提供一些一般性指导。
海关复杂性增加 最好加起来单片成本比较多轴解决方案可合并二分驱动器和加载卡相加单个组件的价格极有可能定制二轴驱动成本较低(即使包括工程成本和NRE成本)。
自定义servo驱动收集Even举例说,设计自己的servo驱动器需要多少钱?多年客户争先恐后 设计出自己的解决方案 最终结果不尽人意 可靠性差几星期或数月内提供优异解决方案令客户非常快乐,
如何实现
如何快速交付最佳解决方案简单答案是-它就是我们设计servo驱动器的技能集每日实践和梳理,并显示时间交付、质量、性能和定价我们真的相信所有事都有可能应用ApVenceD运动控件,而我们定制产品则能实现这一点。
-
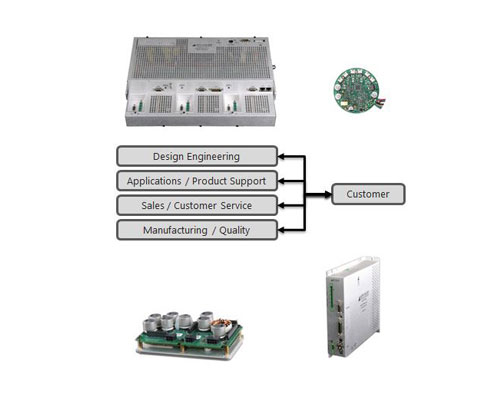
我们的强项
-
-
- 现场工程制造
- 工程应用系与客户密切合作
- 搭建同一种设备 由同一批人制作
-
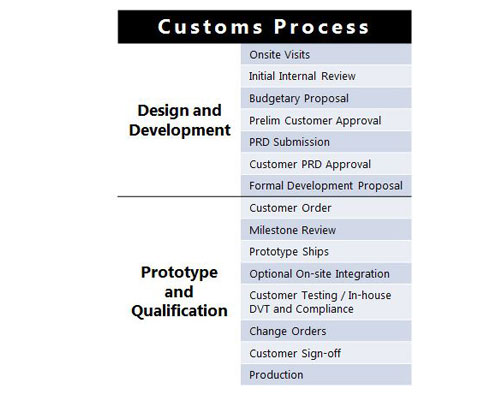
海关流程
-
- 自定义设计在成本和周转时间方面有许多长处
- 定制满足精确形式、适配和函数需求
- 节省费用是因为某些系统不需要组件或特征
- ADVENCED运动控制公司的经验和内部设施将产生可靠定制解决方案比市场上任何其他供应商都快

























































































