- 提供配置文件
- Technosoft是领先的DSP运动控制技术公司专业从事数字运动控制产品和定制运动系统——基于运动控制专用DSP MotionChipTM的智能伺服驱动器和电机。
通过嵌入式智能和简单的高级软件可编程性,Technosoft数字伺服/步进驱动器和电机为各种应用提供理想的解决方案,从医疗,工业,纺织到半导体工厂自动化。
产品组合
智能驱动

- Technosoft的iPOS系列智能驱动器是基于一种新的设计理念,带来了具有成本效益的,紧凑的,模块化的解决方案,旋转或线性无刷,直流刷和步进电机的位置,速度和转矩控制。iPOS智能驱动器设计涵盖小容量和大容量应用,将所有基本的电机控制功能和运动控制功能集成在一个模块中。随着新ipo智能驱动家族的发展,Technosoft也扩展了分布式运动控制的概念。现在您可以在ipo驱动器和EtherCAT或CANopen主控程序之间分割运动应用程序。使用TML (Technosoft的运动编程语言),您可以在每个驱动器上本地构建复杂的运动应用程序,只在EtherCAT或CANopen主机上保留高级运动应用程序,从而降低网络主机的复杂性。master监督整个动作应用程序,而ipo驱动器执行特定的任务。
-
-

iPOS2401 MX-CAN 7-30V 0.9A 24W CANopen/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:730 VDC / 740 VDC
- 输出电流:0.9 A连续/峰值
- 通讯通过RS232, TMLCAN和CANopen接口
- 具有很高集成密度的模块化插件模块
- 用于焊接/插入针头与间距2毫米
- 尺寸(长×宽×高):46.5 × 19.2 × 8.5毫米
产品特性
- 标准2毫米间距头匹配连接器
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 多种操作方式:转矩、速度或位置控制;位置或速度剖面;参考:外部模拟,或通过通信总线发送
- 用于定义和执行运动序列的TML指令集
- 独立操作与存储的运动序列
- 交流:
- rs - 232串行
- CAN-Bus 2.0B,最高可达1mbit /s或CANopen
- 数字和模拟I/ o:
- 5个数字输入:5- 24v, NPN(使能,2个限位开关和2个通用输入)
- 2数字输出:5- 24v, 0.5 A, NPN开路集电极(通用)
- 1模拟量输入:12位,0 ~ 5v:参考或通用
- 反馈设备支持:
- 增量式四编码器(单端、开路集电极和差分)
- 简单的配置和编程与EasyMotion Studio软件平台
- 过流保护、短路保护、接地保护、过欠压保护、I2t保护、控制错误保护
-

iPOS2401 MX-CAT 7-30V 0.9A 24W EtherCAT
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:730 VDC / 740 VDC
- 输出电流:0.9 A连续/峰值
- 通过RS232或EtherCAT通信
- 具有很高集成密度的模块化插件模块
- 用于焊接/插入针头与间距2毫米
- 尺寸(长×宽×高):46.5 × 19.2 × 8.5毫米
产品特性
- CANopen类似的驱动
- 标准2毫米间距头匹配连接器
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 多种操作方式:转矩、速度或位置控制;位置或速度剖面;参考:外部模拟,或通过通信总线发送
- 用于定义和执行运动序列的TML指令集
- 独立操作与存储的运动序列
- 交流:
- rs - 232串行
- EtherCAT通信周期降低到900 μ s;基于EtherCAT的CAN应用协议(CoE)
- 数字和模拟I/ o:
- 5个数字输入:5- 24v, NPN(使能,2个限位开关和2个通用输入)
- 2数字输出:5- 24v, 0.5 A, NPN开路集电极(通用)
- 1模拟量输入:12位,0 ~ 5v:参考或通用
- 反馈设备支持:
- 增量式四编码器(单端、开路集电极和差分)
- 数字霍尔传感器
- 简单的配置和编程与EasyMotion Studio软件平台
- 具有过温、过流、短路、接地、过欠压、I2t、控制错误等保护功能
-

iPOS3602 VX-CAN 9-36V 2A 75W CANopen/EtherCAT
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:936 VDC
- 输出电流:2 A连续;3.2峰值电流
- 通过RS232、CAN/CANopen(标准)或EtherCAT(可选)通信
- 集成密度非常高的PCIe插件模块
- 灵活的集成在单一或多轴主板
- 尺寸(长×宽×高):46.5 × 19.2 × 8.5毫米
产品特性
- 标准PCIe 4x匹配连接器
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 多种操作方式:转矩、速度或位置控制;位置或速度剖面;参考:外部模拟,或通过通信总线发送
- 用于定义和执行运动序列的TML指令集
- 独立操作与存储的运动序列
- rs - 232串行通信
- CAN-Bus 2.0B,最高可达1mbit /s或CANopen
- EtherCAT通过附加扩展模块进行通信(可选)
- 数字和模拟I/ o:
- 5路数字输入:5- 36v, NPN(使能,2个限位开关,2个通用开关)
- 4个数字输出:5- 36v, 0.5 A, NPN开路集电极(Ready, Error, 2个通用输出)
- 2模拟输入:12位,0- 5v:参考,反馈或通用
- 反馈设备支持:
- 增量式四编码器(单端、开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1 Vpp)
- 数字和线性霍尔传感器
- 简单的配置和编程与EasyMotion Studio软件平台
- 过流保护、短路保护、接地保护、过欠压保护、I2t保护、控制错误保护
-

iPOS3602 MX-CAN 9-36V 2A 75W CANopen/EtherCAT
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:936 VDC
- 输出电流:2 A连续;3.2峰值电流
- 通过RS232、CAN/CANopen(标准)或EtherCAT(可选)通信
- 用于焊接/插入与针头的间距为2.54毫米
- 尺寸(长×宽×高):55 × 26.4 × 13.1毫米
产品特性
- 标准的交配连接器
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 多种操作方式:转矩、速度或位置控制;位置或速度剖面;参考:外部模拟,或通过通信总线发送
- 用于定义和执行运动序列的TML指令集
- 独立操作与存储的运动序列
- 交流:
- rs - 232串行
- CAN-Bus 2.0B,最高可达1mbit /s或CANopen
- EtherCAT通过附加扩展模块(可选)
- 数字和模拟I/ o:
- 5路数字输入:5- 36v, NPN(使能,2个限位开关,2个通用开关)
- 4个数字输出:5- 36v, 0.5 A, NPN开路集电极(Ready, Error, 2个通用输出)
- 1模拟量输入:12位,0 ~ 5v:参考或通用
- 反馈设备支持:
- 增量式四编码器(单端、开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1 Vpp)
- 数字和线性霍尔传感器
- 简单的配置和编程与EasyMotion Studio软件平台
- 过流保护、短路保护、接地保护、过欠压保护、I2t保护、控制错误保护
-

iPOS3602 BX-CAN 9-36V 2A 75W CANopen/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:936 VDC
- 输出电流:2 A连续;3.2峰值电流
- 通讯通过RS232, TMLCAN和CANopen接口
- 封闭式框架设计,可伸缩连接器
- 尺寸(长×宽×高):80 × 55 × 16.3毫米
产品特性
- CAN-Bus 2.0B,最高可达1mbit /s或CANopen
- 数字和模拟I/ o:
- 5路数字输入:5- 36v, NPN或PNP(使能,2个限位开关,2个通用开关)
- 3个数字输出:5- 36v, 0.5 A, NPN开路集电极(Ready, Error, 2个通用输出)
- 1模拟量输入:12位,0- 5v:参考,反馈或通用
- 反馈设备支持:
- 增量式四编码器(单端、开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1 Vpp)
- 数字和线性霍尔传感器
- 简单的配置和编程与EasyMotion Studio软件平台
- 过流保护、短路保护、接地保护、过欠压保护、I2t保护、控制错误保护
-

iPOS3602 HX-CAN 9-36V 2A 75W CANopen/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:936 VDC
- 输出电流:2 A连续;3.2峰值电流
- 通讯通过RS232, TMLCAN和CANopen接口
- 封闭式框架设计,垂直可伸缩连接器
- 尺寸(长×宽×高):73 × 45 × 16毫米
产品特性
- RS-232,波特率高达115200
- CAN-Bus,高达1mbit, TMLCAN或CANopen (CiA 301, 305和402)协议
- 数字和模拟I/ o:
- 5位数字输入:5- 36v, NPN/PNP可编程
- 4位数字输出:5- 36v, 0.5 A, NPN开路集电极
- 1模拟量输入:12位,0- 5v
- 反馈设备:
- 增量四编码器,RS-422差分
- 正弦/余弦增量编码器,1 Vpp差分
- 数字霍尔传感器
- 过流保护、短路保护、接地保护、过欠压保护、I2t保护、控制错误保护
-

iPOS3604 VX-CAN 9-36V 4A 144W CANopen/EtherCAT
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:936 VDC
- 输出电流:4 A连续;10 A峰值电流
- 通过RS232、CAN/CANopen(标准)或EtherCAT(可选)通信
- 集成密度非常高的PCIe插件模块
- 灵活的集成在单一或多轴主板
- 尺寸(长×宽×高):46.5 × 19.2 × 8.5毫米
产品特性
- 标准PCIe 4x匹配连接器
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 多种操作方式:转矩、速度或位置控制;位置或速度剖面;参考:外部模拟,或通过通信总线发送
- 用于定义和执行运动序列的TML指令集
- 独立操作与存储的运动序列
- rs - 232串行通信
- CAN-Bus 2.0B,最高可达1mbit /s或CANopen
- EtherCAT通过附加扩展模块进行通信(可选)
- 数字和模拟I/ o:
- 5路数字输入:5- 36v, NPN(使能,2个限位开关,2个通用开关)
- 4个数字输出:5- 36v, 0.5 A, NPN开路集电极(Ready, Error, 2个通用输出)
- 2模拟输入:12位,0- 5v:参考,反馈或通用
- 反馈设备支持:
- 增量式四编码器(单端、开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1 Vpp)
- 数字和线性霍尔传感器
- 简单的配置和编程与EasyMotion Studio软件平台
- 过流保护、短路保护、接地保护、过欠压保护、I2t保护、控制错误保护
-

iPOS3604 MX-CAN 9-36V 4A 144W CANopen/EtherCAT
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:936 VDC
- 输出电流:4 A连续;10 A峰值电流
- 通过RS232、CAN/CANopen(标准)或EtherCAT(可选)通信
- 用于焊接/插入与针头的间距为2.54毫米
- 尺寸(长×宽×高):55 × 26.4 × 13.1毫米
产品特性
- EtherCAT通过附加扩展模块(可选)
- 数字和模拟I/ o:
- 5个数字输入,5- 36v, NPN:使能,2个用于限位开关,2个通用
- 4个数字输出,5-36V, 0.5A, NPN o.c.: Ready, Error, 2通用
- 1模拟量输入:12位,0-5V:参考或通用
- 反馈设备支持:
- 增量式四编码器(单端、开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1 Vpp)
- 数字和线性霍尔传感器
- 简单的配置和编程与EasyMotion Studio软件平台
- 过流保护、短路保护、接地保护、过欠压保护、I2t保护、控制错误保护
-

iPOS3604 BX-CAN 9-36V 4A 144W CANopen/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:936 VDC
- 输出电流:4 A连续;10 A峰值电流
- 通讯通过RS232, TMLCAN和CANopen接口
- 封闭式框架设计,可伸缩连接器
- 尺寸(长×宽×高):80 × 55 × 16.3毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 多种操作方式:转矩、速度或位置控制;位置或速度剖面;参考:外部模拟,或通过通信总线发送
- 用于定义和执行运动序列的TML指令集
- 独立操作与存储的运动序列
- rs - 232串行通信
- CAN-Bus 2.0B,最高可达1mbit /s或CANopen
- 数字和模拟I/ o:
- 5个数字输入,5- 36v, PNP或NPN:使能,2个用于限位开关,2个通用
- 3数字输出,5- 36v, 0.5 A,1.7 A峰值,PNP: Ready, Error,通用
- 1模拟量输入:12位,0- 5v:参考,反馈或通用
- 反馈设备支持:
- 增量式四编码器(单端、开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1 Vpp)
- 数字和线性霍尔传感器
- 简单的配置和编程与EasyMotion Studio软件平台
- 过流保护、短路保护、接地保护、过欠压保护、I2t保护、控制错误保护
-

iPOS3604 HX-CAN 9-36V 4A 144W CANopen/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:936 VDC
- 输出电流:4 A连续;10 A峰值电流
- 通讯通过RS232, TMLCAN和CANopen接口
- 封闭式框架设计,垂直可伸缩连接器
- 尺寸(长×宽×高):73 × 45 × 16毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 位置,速度和转矩控制
- 运动方式:位置和速度剖面;PVT & PT插补,电子传动装置和凸轮,外部参考:模拟或通过通信总线发送
- 通过TML或通过运动库进行运动编程
- 独立操作的完整运动程序存储在驱动器的记忆
- 交流:
- RS-232,波特率高达115200
- CAN-Bus,高达1mbit, TMLCAN或CANopen (CiA 301, 305和402)协议
- 数字和模拟I/ o:
- 5位数字输入:5- 36v, NPN/PNP可编程
- 4位数字输出:5- 36v, 0.5 A, NPN开路集电极
- 1模拟量输入:12位,0- 5v
- 反馈设备:
- 增量四编码器,RS-422差分
- 正弦/余弦增量编码器,1 Vpp差分
- 数字霍尔传感器
- 过流保护、短路保护、接地保护、过欠压保护、I2t保护、控制错误保护
-

iPOS4808 VX-CAN 11-50V 8A 400W CANopen/EtherCAT
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:1150 VDC / 1236 VDC
- 输出电流:8 A连续;峰值电流20a
- 通过RS232、CAN/CANopen(标准)或EtherCAT(可选)通信
- 开框PCB垂直插件设计
- 尺寸(长×宽×高):56 × 44 × 6.9毫米
产品特性
- 标准PCIe 8x匹配连接器
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 多种操作方式:转矩、速度或位置控制;位置或速度剖面;参考:外部模拟,或通过通信总线发送
- 用于定义和执行运动序列的TML指令集
- 独立操作与存储的运动序列
- rs - 232串行通信
- CAN-Bus 2.0B,最高可达1mbit /s或CANopen
- EtherCAT通过附加扩展模块进行通信(可选)
- 数字和模拟I/ o:
- 8路数字输入:5- 36v, NPN(使能,2个限位开关,5个通用开关)
- 5个数字输出:5- 36v, 0.5 A, NPN开路集电极(Ready, Error, 3个通用输出)
- 2模拟输入:12位,0- 5v:参考,反馈或通用
- 反馈设备支持:
- 增量式四编码器(单端、开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1 Vpp)
- 数字和线性霍尔传感器
- 简单的配置和编程与EasyMotion Studio软件平台
- 过流、短路、过欠压、I2t、控制错误等保护
-

iPOS4808 MY-CAN 11-50V 8A 400W CANopen/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:1150 VDC / 1236 VDC
- 输出电流:8 A连续;峰值电流20a
- 通讯通过RS232, TMLCAN和CANopen接口
- 用于焊接/插入栅格尺寸为2.54 mm的针头
- 尺寸(长×宽×高):60 × 43.6 × 12.4毫米
产品特性
- 标准头2.54毫米间距连接器
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 多种操作方式:转矩、速度或位置控制;位置或速度剖面;参考:外部模拟,或通过通信总线发送
- 用于定义和执行运动序列的TML指令集
- 通过不同的运动库(Linux、Delphi、Visual Basic、c++、LabView、Siemens、B & R、Omron)连接PC和PLC
- 独立操作与存储的运动序列
- rs - 232串行通信
- CAN-Bus 2.0B,最高可达1mbit /s或CANopen
- EtherCAT通信可用(关于- cat驱动器版本,请参阅“订购信息”)
- 数字和模拟I/ o:
- 6路数字输入:5- 36v(2个限位开关,4个通用开关)
- 5个数字输出:5- 36v, 0.5 A (Ready, Error, 3个通用输出)
- 2模拟输入:12位,0- 5v:参考,反馈或通用
- 安全:
- 驱动使电路
- 与iPOS4808-CAN-STO和iPOS4808-CAT-STO版本:2安全扭矩关闭输入,安全完整性等级(SIL3/Cat3/PLe)根据EN61800-5-1;-2/ EN61508-3;-4/ EN ISO 13849-1。
- 反馈设备(支持双回路):
- 1日反馈:
- 增量式四编码器(单端、开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分:1 Vpp)
- 数字和线性霍尔传感器
- 2日反馈:
- 增量式四轴编码器(差分)
- 脉冲和方向接口(差分)
- BiSS / SSI编码器接口
- 通过引脚配置127 h/w可选地址
- 简单的配置和编程与EasyMotion Studio软件平台
- 过流、短路、过欠压、I2t、控制错误等保护
-

iPOS4808 MY-STO 11-50V 8A 400W CANopen/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:1150 VDC / 1236 VDC
- 输出电流:8 A连续;峰值电流20a
- 通讯通过RS232, TMLCAN和CANopen接口
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 用于焊接/插入栅格尺寸为2.54 mm的针头
- 尺寸(长×宽×高):60 × 43.6 × 22毫米
产品特性
- 标准头2.54毫米间距连接器
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 多种操作方式:转矩、速度或位置控制;位置或速度剖面;参考:外部模拟,或通过通信总线发送
- 用于定义和执行运动序列的TML指令集
- 通过不同的运动库(Linux、Delphi、Visual Basic、c++、LabView、Siemens、B & R、Omron)连接PC和PLC
- 独立操作与存储的运动序列
- rs - 232串行通信
- CAN-Bus 2.0B,最高可达1mbit /s或CANopen
- EtherCAT通信可用(关于- cat驱动器版本,请参阅“订购信息”)
- 数字和模拟I/ o:
- 6路数字输入:5- 36v(2个限位开关,4个通用开关)
- 5个数字输出:5- 36v, 0.5 A (Ready, Error, 3个通用输出)
- 2模拟输入:12位,0- 5v:参考,反馈或通用
- 安全:
- 驱动使电路
- iPOS4808-CAN-STO和iPOS4808-CAT-STO版本:2个安全的扭矩关闭输入,
- 安全完整性等级(SIL3/Cat3/PLe)根据
- -2/ en61508-3;-4/ en iso 13849-1。
- 反馈设备(支持双回路):
- 1日反馈:
- 增量式四编码器(单端、开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分:1 Vpp)
- 数字和线性霍尔传感器
- 2日反馈:
- 增量式四轴编码器(差分)
- 脉冲和方向接口(差分)
- BiSS / SSI编码器接口
- 通过引脚配置127 h/w可选地址
- 简单的配置和编程与EasyMotion Studio软件平台
- 过流、短路、过欠压、I2t、控制错误等保护
-

iPOS4808 BX-CAN 11-50V 8A 400W CANopen/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:1150 VDC / 1236 VDC
- 输出电流:8 A连续;峰值电流20a
- 通讯通过RS232, TMLCAN和CANopen接口
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 封闭式框架设计,可伸缩连接器
- 尺寸(长×宽×高):88.5 × 77 × 16.4毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 多种操作方式:转矩、速度或位置控制;位置或速度剖面;循环同步定位方式;
- 参考:外部模拟,或通过通信总线发送
- 用于定义和执行运动序列的TML指令集
- 独立操作与存储的运动序列
- rs - 232串行通信
- 最高可达1mbit /s的CAN-Bus 2.0B或CANopen (CiA 301v4.2和402v3.0)协议
- 独立的使能电路(电路不活跃时电机不供电)
- 数字和模拟I/ o:
- 6路数字输入:5- 36v, NPN或PNP(使能,2个限位开关,3个通用开关)
- 5个数字输出:5- 36v, 0.5 A, NPN开路集电极(Ready, Error, 3个通用输出)
- 2模拟输入:12位,0- 5v:参考,反馈或通用
- 反馈设备(双回路支持):
- 1日反馈:
- 增量式四编码器(单端、开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1 Vpp)
- 数字和线性霍尔传感器
- 二次反馈(双回路)/数字参考:
- 增量式四编码器或脉冲&方向(差分)
- SSI / bis *编码器接口
- 简单的配置和编程与EasyMotion Studio软件平台
- 过流、短路、过欠压、I2t、控制错误等保护
-

iPOS4808 BX-CAT 11-50V 8A 400W EtherCAT
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:1150 VDC / 1236 VDC
- 输出电流:8 A连续;峰值电流20a
- 通过RS232或EtherCAT通信
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 封闭式框架设计,可伸缩连接器
- 尺寸(长×宽×高):88.5 × 77 × 16.4毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 多种操作方式:转矩、速度或位置控制;位置或速度剖面;循环同步定位方式;
- 参考:外部模拟,或通过通信总线发送
- 用于定义和执行运动序列的TML指令集
- 独立操作与存储的运动序列
- rs - 232串行通信
- EtherCAT:通信周期降至400 μ s;基于EtherCAT的CAN应用协议(CoE)
- 独立的使能电路(电路不活跃时电机不供电)
- 数字和模拟I/ o:
- 6路数字输入:5- 36v, NPN或PNP(使能,2个限位开关,3个通用开关)
- 5个数字输出:5- 36v, 0.5 A, NPN开路集电极(Ready, Error, 3个通用输出)
- 2模拟输入:12位,0- 5v:参考,反馈或通用
- 反馈设备(双回路支持):
- 1日反馈:
- 增量式四编码器(单端、开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1 Vpp)
- 数字和线性霍尔传感器
- 二次反馈(双回路)/数字参考:
- 增量式四编码器或脉冲&方向(差分)
- SSI / bis *编码器接口
- 简单的配置和编程与EasyMotion Studio软件平台
- 过流、短路、过欠压、I2t、控制错误等保护
-

iPOS4850 BX-CAN 11-60V 50A 2.5kW CANopen/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:1160 VDC / 936 VDC
- 输出电流:50 A连续;峰值电流90 A
- 支持各种反馈选项,包括Sin / Cos和绝对编码器
- 通讯通过RS232, TMLCAN和CANopen接口
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 封闭式框架设计,可伸缩连接器
- 尺寸(长×宽×高):139 × 93.9 × 24.6毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 三相步进器的开闭环控制
- 位置,速度和转矩控制
- 运动方式:位置和速度剖面;PVT & PT插补,电子传动装置和凸轮,外部参考:模拟或通过通信总线发送
- 通过TML (Technosoft Motion Language)或通过运动库为Windows (VC / VB / Labview), Linux和各种PLC进行运动编程
- 独立操作的完整运动程序存储在驱动器存储器
- 交流:
- RS-232,波特率高达115200
- CAN总线,高达1兆,与TMLCAN或CANopen (CiA 301, 305和402)协议
- 数字和模拟I/ o:
- 2位数字输入:7- 36v, PNP
- 2数字输出:5- 36v, 0.5 A, NPN开路集电极
- 3个模拟输入:12位,0-5 V
- 电机制动器电磁驱动器,2A, OUT0指令
- 安全:
- 2安全扭矩切断输入,安全完整性等级(SIL3/Cat3/PLe)
- 2/ EN61508-3;-4/ EN ISO 13849-1
- 反馈设备(支持双回路):
- 1日反馈:
- 增量四编码器,RS-422差分
- 2日反馈:
- 增量四编码器,RS-422差分
- SSI,国际清算银行
- 脉冲和方向接口,RS-422差分
- 32 h/w可选地址通过引脚配置
- 简单的配置和编程与EasyMotion Studio软件平台
- 保护:过流、短路、过温、接地故障、过欠压、I2t、控制错误
-

iPOS8010 BX-CAN 11-80V 10A 800W CANopen/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:1180 VDC / 936 VDC
- 输出电流:10a连续;峰值电流20a
- 支持各种反馈选项,包括Sin / Cos和绝对编码器
- 通讯通过RS232, TMLCAN和CANopen接口
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 封闭式框架设计,可伸缩连接器
- 尺寸(长×宽×高):139 × 94.2 × 24.5毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 位置,速度和转矩控制
- 运动方式:位置和速度剖面;PVT & PT插补,电子传动装置和凸轮,外部参考:模拟或通过通信总线发送
- 通过TML (Technosoft Motion Language)或通过运动库为Windows (VC / VB / Labview), Linux和各种PLC进行运动编程
- 独立操作的完整运动程序存储在驱动器存储器
- 交流:
- RS-232,波特率高达115200
- CAN总线,高达1兆,与TMLCAN或CANopen (CiA 301, 305和402)协议
- 数字和模拟I/ o:
- 4路数字输入:5- 36v, NPN/PNP可编程
- 4位数字输出:5- 36v, 0.5 A, NPN开路集电极
- 2个模拟输入:12位,0-5 V
- 安全:
- 具有BA和BR版本:驱动使能电路
- 带BX版本:2个安全扭矩关闭输入,安全完整性等级(SIL3/Cat3/PLe)
- 2/ EN61508-3;-4/ EN ISO 13849-1。
- 反馈设备(支持双回路):
- 1日反馈:
- 增量式四路编码器,RS-422差分(BX和BA型号)
- 正弦/余弦增量编码器,1 Vpp差分(BX和BA模型)
- 数字大厅传感器(BX和BA型号)
- 解析器(BR模型)
- 脉冲和方向接口,RS-422差分(BX和BA型号)
- 2日反馈:
- 增量式四轴编码器,RS-422差分(所有型号)
- 1 Vpp差分正弦/余弦增量编码器(BA模型)
- SSI, bis (BX和BA型号)
- EnDAT, Hiperface,绝对A编码器(BA型号)
- RS-422差分脉冲和方向接口(BX型号)
- 通过引脚配置127 h/w可选地址
- 简单的配置和编程与EasyMotion Studio软件平台
- 保护:过流、短路、接地故障、过欠压、I2t、控制错误
-

iPOS8010 BX-CAT 11-80V 10A 800W EtherCAT
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:1180 VDC / 936 VDC
- 输出电流:10a连续;峰值电流20a
- 支持各种反馈选项,包括Sin / Cos和绝对编码器
- 通过RS232或EtherCAT通信
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 封闭式框架设计,可伸缩连接器
- 尺寸(长×宽×高):139 × 94.2 × 24.5毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 位置,速度和转矩控制
- 运动方式:位置和速度剖面;PVT & PT插补,电子传动和凸轮,循环同步位置,速度和扭矩
- 通过TML (Technosoft Motion Language)进行运动编程
- 独立执行存储在驱动器存储器中的复杂运动函数
- 交流:
- RS-232,波特率高达115200,用于设置
- 使用CoE协议的EtherCAT
- 数字和模拟I/ o:
- 4路数字输入:5- 36v, NPN/PNP可编程
- 4位数字输出:5- 36v, 0.5 A, NPN开路集电极
- 2个模拟输入:12位,0-5 V
- 安全:
- 具有BA和BR版本:驱动使能电路
- 带BX版本:2个安全扭矩关闭输入,安全完整性等级(SIL3/Cat3/PLe)
- 2/ EN61508-3;-4/ EN ISO 13849-1。
- 反馈设备(支持双回路):
- 1日反馈:
- 增量式四路编码器,RS-422差分(BX和BA型号)
- 正弦/余弦增量编码器,1 Vpp差分(BX和BA模型)
- 数字大厅传感器(BX和BA型号)
- 解析器(BR模型)
- 脉冲和方向接口,RS-422差分(BX和BA型号)
- 2日反馈:
- 增量式四轴编码器,RS-422差分(所有型号)
- 1 Vpp差分正弦/余弦增量编码器(BA模型)
- SSI, bis (BX和BA型号)
- EnDAT, Hiperface,绝对A编码器(BA型号)
- RS-422差分脉冲和方向接口(BX型号)
- 通过引脚配置127 h/w可选地址
- 简单的配置和编程与EasyMotion Studio软件平台
- 保护:过流、短路、接地故障、过欠压、I2t、控制错误
-

iPOS8020 BX-CAN 11-80V 20A 1.6kW CANopen/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:1180 VDC / 936 VDC
- 输出电流:连续20 A;峰值电流40 A
- 支持各种反馈选项,包括Sin / Cos和绝对编码器
- 通讯通过RS232, TMLCAN和CANopen接口
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 封闭式框架设计,可伸缩连接器
- 尺寸(长×宽×高):139 × 94.2 × 24.5毫米
产品特性
- 具有BA和BR版本:驱动使能电路
- 带BX版本:2个安全扭矩关闭输入,安全完整性等级(SIL3/Cat3/PLe)
- 2/ EN61508-3;-4/ EN ISO 13849-1。
- 反馈设备(支持双回路):
- 1日反馈:
- 增量式四路编码器,RS-422差分(BX和BA型号)
- 正弦/余弦增量编码器,1 Vpp差分(BX和BA模型)
- 数字大厅传感器(BX和BA型号)
- 解析器(BR模型)
- 脉冲和方向接口,RS-422差分(BX和BA型号)
- 2日反馈:
- 增量式四轴编码器,RS-422差分(所有型号)
- 1 Vpp差分正弦/余弦增量编码器(BA模型)
- SSI, bis (BX和BA型号)
- RS-422差分脉冲和方向接口(BX型号)
- 通过引脚配置127 h/w可选地址
- 简单的配置和编程与EasyMotion Studio软件平台
- 保护:过流、短路、接地故障、过欠压、I2t、控制错误
-

iPOS8020 BX-CAT 11-80V 20A 1.6kW EtherCAT
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:1180 VDC / 936 VDC
- 输出电流:连续20 A;峰值电流40 A
- 支持各种反馈选项,包括Sin / Cos和绝对编码器
- 通过RS232或EtherCAT通信
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 封闭式框架设计,可伸缩连接器
- 尺寸(长×宽×高):139 × 94.2 × 24.5毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 位置,速度和转矩控制
- 运动方式:位置和速度剖面;PVT & PT插补,电子传动装置和凸轮,外部参考:模拟或通过通信总线发送
- 通过TML (Technosoft Motion Language)进行运动编程
- 交流:
- RS-232,波特率高达115200
- 带CoE协议的EtherCAT
- 数字和模拟I/ o:
- 4路数字输入:5- 36v, NPN/PNP可编程
- 4位数字输出:5- 36v, 0.5 A, NPN开路集电极
- 2个模拟输入:12位,0-5 V
- 安全:
- 具有BA和BR版本:驱动使能电路
- 带BX版本:2个安全扭矩关闭输入,安全完整性等级(SIL3/Cat3/PLe)
- 2/ EN61508-3;-4/ EN ISO 13849-1。
- 反馈设备(支持双回路):
- 1日反馈:
- 增量式四路编码器,RS-422差分(BX和BA型号)
- 正弦/余弦增量编码器,1 Vpp差分(BX和BA模型)
- 数字大厅传感器(BX和BA型号)
- 解析器(BR模型)
- 脉冲和方向接口,RS-422差分(BX和BA型号)
- 2日反馈:
- 增量式四轴编码器,RS-422差分(所有型号)
- 1 Vpp差分正弦/余弦增量编码器(BA模型)
- SSI, bis (BX和BA型号)
- RS-422差分脉冲和方向接口(BX型号)
- 通过引脚配置127 h/w可选地址
-

iMOTIONCUBE CAN CAN 11-80V 20A 1.6kW CANopen/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:1180 VDC / 936 VDC
- 输出电流:连续20 A;峰值电流40 A
- 支持各种反馈选项,包括Sin/Cos和绝对编码器
- 通讯通过RS232, TMLCAN和CANopen接口
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 尺寸(长×宽×高):60 × 40 × 28.2毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 两相和三相步进器的开环或闭环控制
- 位置,速度和转矩控制
- 运动方式:位置和速度剖面;PVT & PT插补,电子传动装置和凸轮,外部参考:模拟或通过通信总线发送
- 通过TML (Technosoft Motion Language)或通过运动库为Windows (VC / VB / Labview), Linux和各种PLC进行运动编程
- 独立操作的完整运动程序存储在驱动器的记忆
- 交流:
- RS-232,波特率高达115200
- CAN总线,高达1Mbit,与TMLCAN或CANopen (CiA 301, 305和402)协议
- 数字和模拟I/ o:
- 4路数字输入:5- 36v, NPN/PNP可编程
- 4位数字输出:5- 36v, 0.5 A, NPN开路集电极
- 2个模拟输入:12位,0-5 V
- 安全:驱动使能电路
- 反馈设备(双回路支持):
- 1日反馈:
- 增量式四编码器(单端、开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1 Vpp)
- 数字和线性霍尔传感器
- 二次反馈(双回路)/数字参考:
- 增量式四编码器或脉冲&方向(差分)
- SSI / bis *编码器接口
- 保护:过流、短路、过欠压、I2t、控制错误
-
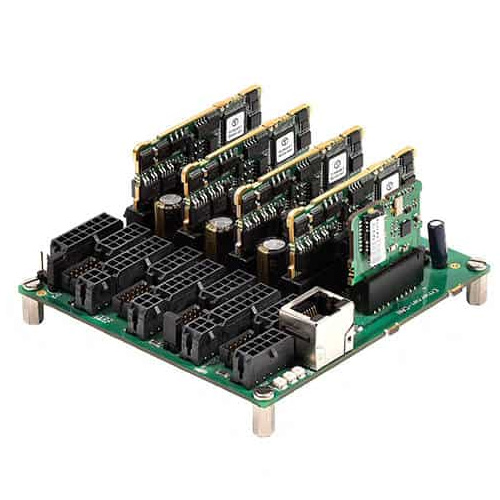
Ipos360x sx多轴运动系统
-
-
- 多达4个iPOS360x VX-CAN驱动控制器的运动系统
- 适用于直流无刷、直流刷、步进、直线和音圈电机
- 电源电压:9- 36vdc;逻辑电压:7- 36vdc
- 高达4 A连续,10 A峰值每个驱动器
- CAN轴间通信
- RS-232和以太网设置
- 尺寸(长×宽×高):98 × 100.3 × 21.2毫米
产品特性
- 紧凑(100.3 x 98 x 37毫米),可用于多达4轴的即时运行解决方案。
- 电源:电机/电源:+9 ~ +36 Vdc;逻辑:+7 ~ +36 Vdc
- 输出电流:
- iPOS3604: 4 A连续(无刷直流模式),每轴10 A峰值电流
- iPOS3602: 2 A连续(无刷直流模式),每轴峰值电流3.2 A
- 通信:can总线高达1mb /s, RS-232高达115k,以太网100 Mb/s
- can总线协议:CANopen (CiA301 v4.2, DSP305 v2.2, DSP402 v3.0)或Technosofts TMLCAN,可通过跳线选择
- 交货选择:从一个到四个iPOS3602 VX或iPOS3604 VX智能伺服驱动器,每个产品:
- 高性能控制旋转或线性无刷,直流有刷或步进电机
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 开环(最大可达512微步/步)或两相和闭环控制
- 三相步进
- 转矩、速度或位置控制
- 反馈选项:增量单端或RS-422差分编码器,1 Vpp正弦/余弦编码器,数字或线性霍尔传感器
- 多种操作方式:位置或速度剖面(梯形或s曲线),内插(PT和PVT),外部(脉冲和方向,模拟),电子传动或凸轮(通过can总线发送主位置)
- 强大的TML指令集,用于定义/执行运动序列(TMLCAN协议)
- 独立操作,存储运动序列(TMLCAN协议)
- 5个数字输入,5- 36v(兼容NPN输出):使能,2个限位开关,2个通用开关
- 3数字输出,5- 36v, 0.2 A: Ready, Error, 1通用
- 2个模拟输入,12位,0- 5v:参考,反馈或通用
- 反馈设备支持:
- 增量式四编码器(单端、开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1 Vpp)
- 数字和线性霍尔传感器
- 简单的配置和编程与EasyMotion Studio软件平台
- 过流保护、短路保护、接地保护、过欠压保护、I2t保护、控制错误保护
-
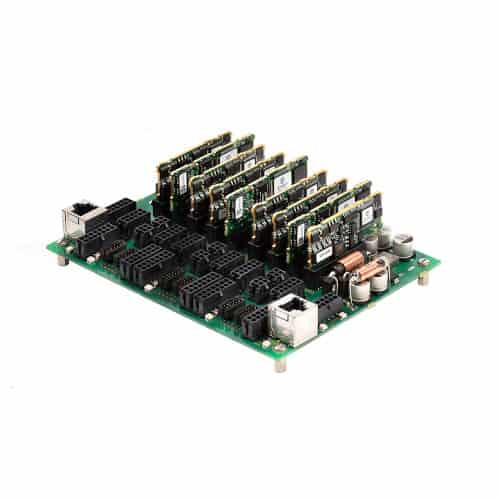
iPOS360x SY-CAN六轴运动系统CANopen/EtherCAT
-
-
- 运动系统拥有多达6个iPOS360x VX-CAN驱动控制器
- 适用于直流无刷、直流刷、步进、直线和音圈电机
- 电源电压:9- 36vdc;逻辑电压:7- 36vdc
- 高达4 A连续,10 A峰值每个驱动器
- CAN/CANopen (CiA301, 305和402)或EtherCAT (CoE)
- RS-232和以太网设置
- 尺寸(长×宽×高):160 × 122 × 22毫米
产品特性
- 紧凑(160 x 122 x 37毫米),可用于多达6个轴的即时运行解决方案。
- 电源:电机/电源:+12 ~ +36 Vdc;逻辑:+12 ~ +36 Vdc
- 输出电流:
- iPOS3604: 4 A连续(无刷直流模式),每轴10 A峰值电流
- iPOS3602: 2 A连续(无刷直流模式),每轴峰值电流3.2 A
- 交流:
- 带有CoE协议的EtherCAT (EtherCAT版本)
- CAN总线最高可达1mb /s (CAN版本),具有CANopen (CiA301, 305, 402)和Technosoft的TMLCAN协议,可通过跳线选择
- RS-232高达115 k
- 发货选项:1 - 6个iPOS3602 VX或iPOS3604 VX智能伺服驱动器,各提供:
- 高性能控制旋转或线性无刷,直流有刷或步进电机
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 开环(多达256微步/步)或两相和三相步进器的闭环控制
- 转矩、速度或位置控制
- 反馈选项:增量单端或RS-422差分编码器,1 Vpp正弦/余弦编码器,数字或线性霍尔传感器
- 多种操作方式:位置或速度剖面(梯形或s曲线),内插(PT和PVT),外部(脉冲和方向,模拟),电子传动或凸轮(通过CAN总线发送主位置)
- 强大的TML指令集,用于定义/执行运动序列(TMLCAN协议)
- 独立操作,存储运动序列(TMLCAN协议)
- 5个数字输入,5- 36v(兼容NPN输出):使能,2个限位开关,2个通用开关
- 3数字输出,5- 36v, 0.2 A: Ready, Error, 1通用
- 2个模拟输入,12位,0- 5v:参考,反馈或通用
- 反馈设备支持:
- 增量式四编码器(单端、开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1 Vpp)
- 数字和线性霍尔传感器
- 简单的配置和编程与EasyMotion Studio软件平台
- 过流保护、短路保护、接地保护、过欠压保护、I2t保护、控制错误保护
-

iPOS4808 SY-CAT四轴运动系统EtherCAT
-
-
- 四轴运动系统采用iPOS4808 MY
- 适用于无刷、直流电刷和步进电机
- 12- 50v电机电源,12- 36v逻辑电源
- 8个连续电流,每轴20个峰值电流
- EtherCAT通信(CoE协议)
- rs - 232的设置
- 尺寸(长×宽×高):122.6 × 103.5 × 106.9毫米
产品特性
- 紧凑(100 × 124 × 92毫米),可用于多达4个轴
- 一个电源连接器:电机/电源:+12至+50 Vdc;逻辑:+12 ~ +36 Vdc
- 输出电流:8 A连续,每轴峰值电流20 A
- 通信:带有CoE协议的EtherCAT;RS232的设置
- 基于多达4个iPOS4808 MY智能伺服驱动器,每个驱动器提供:
- 高性能控制旋转或线性无刷,直流有刷或步进电机
- 无刷电机的正弦(FOC)或梯形(霍尔为基础)控制
- 2相和3相步进器的开环(可达512微步/步)或闭环控制
- 多种操作方式:转矩、速度或位置控制;位置或速度剖面;循环同步定位方式;参考:外部模拟,或通过通信总线发送
- 用于定义/执行运动序列的TML指令集
- 独立操作与存储的运动序列
- 独立的使能电路(电路不活跃时电机不供电)
- 数字和模拟I/ o:
- 6个数字输入,5- 36v, NPN或PNP(使能,2个限位开关和3个通用开关)
- 5个数字输出,5- 36v, 0.5 A, NPN开路集电极(Ready, Error, 3通用)
- 2个模拟输入,12位,0- 5v:参考,反馈或通用
- 反馈设备(双回路支持):
- 1日反馈:
- 增量式四编码器(单端、开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1 Vpp)
- 数字和线性霍尔传感器
- 二次反馈(双回路)/数字参考:
- 增量式四编码器或脉冲&方向(差分)
- SSI / bis *编码器接口
- 简单的配置和编程与EasyMotion Studio软件平台
- 过流保护、短路保护、接地保护、过欠压保护、I2t保护、控制错误保护
-

iPOS4808 MY-STO 11-50V 8A 400W EtherCAT
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:1150 VDC / 1236 VDC
- 输出电流:8 A连续;峰值电流20a
- 通过RS232或EtherCAT通信
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 用于焊接/插入栅格尺寸为2.54 mm的针头
- 尺寸(长×宽×高):64 × 43.6 × 22毫米
产品特性
电气特性:
- 电机电源/逻辑电源:1150 VDC / 1236 VDC
- 输出电流:8 A连续,20 A峰值电流
发动机类型:
- 无刷直流电动机(BLDC, PMSM)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈致动器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器非易失性存储器中的复杂运动序列。
-

iMOTIONCUBE CAT 11-80V 20A 1.6kW EtherCAT
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:1180 VDC / 936 VDC
- 输出电流:连续20 A;峰值电流40 A
- 支持各种反馈选项,包括Sin/Cos和绝对编码器
- 通过RS232或EtherCAT通信
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 尺寸(长×宽×高):60 × 40 × 28.2毫米
产品特性
电气特性:
- 电机电源/逻辑电源:11 - 80vdc / 9 - 36vdc
- 输出电流:连续20 A,峰值电流40 A
发动机类型:
- 无刷直流电动机(BLDC, PMSM)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈致动器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器非易失性存储器中的复杂运动序列。
-

iGVD71 CAN-STO 11-80V 100A 8KW CANopen/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源/ STO电源:1180 VDC / 936 VDC / 1836 VDC
- 输出电流:100a连续;峰值电流140 A
- 支持各种反馈选项,包括Sin / Cos和绝对编码器
- 通讯通过RS232, TMLCAN和CANopen接口
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 封闭式框架设计,可伸缩连接器
- 尺寸(长×宽×高):104.2 × 95 × 47.1毫米
产品特性
电气特性:
- 电机电源/逻辑电源/ STO电源:11 - 80vdc / 9 - 36vdc / 18 - 36vdc
- 输出电流:100a连续,140a峰值电流
发动机类型:
- 无刷直流电动机(BLDC, PMSM)
- 有刷直流电机(直流电动机)
- 音圈致动器
- 线性马达
控制:
- 通过CAN总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器非易失性存储器中的复杂运动序列。
-

iPOS4810 MZ-CAN 11-50V 10A RMS 700W CAN/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源/ STO电源:1150 VDC / 936 VDC / 18-40VDC
- 输出电流:10a RMS连续;28a RMS峰值电流
- 通讯通过RS232, TMLCAN和CANopen接口
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 尺寸(长×宽×高):64 × 43.6 × 13.7毫米
产品特性
电气特性:
- 电机电源/逻辑电源/ STO电源:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:10a均方根连续,28a均方根峰值电流
发动机类型:
- 无刷直流电动机(BLDC, PMSM)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈致动器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器非易失性存储器中的复杂运动序列。
-
iPOS4810 MZ-CAT 11-50V 10A RMS 700W EtherCAT
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源/ STO电源:1150 VDC / 936 VDC / 18-40VDC
- 输出电流:10a RMS连续;28a RMS峰值电流
- 通过RS232或EtherCAT通信
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 尺寸(长×宽×高):64 × 43.6 × 13.7毫米
产品特性
电气特性:
- 电机电源/逻辑电源/ STO电源:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:10a RMS连续;28 RMS峰值电流
发动机类型:
- 无刷直流电动机(BLDC, PMSM)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈致动器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器非易失性存储器中的复杂运动序列。
-

iPOS4810 XZ-CAN 11-50V 10A RMS 700W CAN/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源/ STO电源:1150 VDC / 936 VDC / 18-40VDC
- 输出电流:10a RMS连续;28a RMS峰值电流
- 通讯通过RS232, TMLCAN和CANopen接口
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 尺寸(长×宽×高):64 × 43.6 × 13.7毫米
产品特性
电气特性:
- 电机电源/逻辑电源/ STO电源:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:10a均方根连续,28a均方根峰值电流
发动机类型:
- 无刷直流电动机(BLDC, PMSM)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈致动器
- 线性马达
控制:
- 通过CAN总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器非易失性存储器中的复杂运动序列。
-

iPOS4810 XZ-CAT 11-50V 10A RMS 700W EtherCAT
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源/ STO电源:1150 VDC / 936 VDC / 18-40VDC
- 输出电流:10a RMS连续;28a RMS峰值电流
- 通过RS232或EtherCAT通信
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 尺寸(长×宽×高):93 × 43.8 × 32毫米
产品特性
电气特性:
- 电机电源/逻辑电源/ STO电源:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:10a均方根连续,28a均方根峰值电流
发动机类型:
- 无刷直流电动机(BLDC, PMSM)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈致动器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器非易失性存储器中的复杂运动序列。
-

iPOS4815 MZ-CAN 11-50V 15A RMS 1kW CAN/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源/ STO电源:1150 VDC / 936 VDC / 18-40VDC
- 输出电流:15a RMS连续;28a RMS峰值电流
- 通讯通过RS232, TMLCAN和CANopen接口
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 尺寸(长×宽×高):64 × 43.6 × 13.7毫米
产品特性
电气特性:
- 电机电源/逻辑电源/ STO电源:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:15a均方根连续,28a均方根峰值电流
发动机类型:
- 无刷直流电动机(BLDC, PMSM)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈致动器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器非易失性存储器中的复杂运动序列。
-
iPOS4815 MZ-CAT 11-50V 15A RMS 1kW EtherCAT
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源/ STO电源:1150 VDC / 936 VDC / 18-40VDC
- 输出电流:15a RMS连续;28a RMS峰值电流
- 通过RS232或EtherCAT通信
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 尺寸(长×宽×高):64 × 43.6 × 13.7毫米
产品特性
电气特性:
- 电机电源/逻辑电源/ STO电源:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:15a RMS连续;28a RMS峰值电流
发动机类型:
- 无刷直流电动机(BLDC, PMSM)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈致动器
- 线性马达
控制:
- 通过CAN总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器非易失性存储器中的复杂运动序列。
-

iPOS4815 XZ-CAN 11-50V 15A RMS 1kW CAN/TMLCAN
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源/ STO电源:1150 VDC / 936 VDC / 18-40VDC
- 输出电流:15a RMS连续;28a RMS峰值电流
- 通讯通过RS232, TMLCAN和CANopen接口
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 尺寸(长×宽×高):64 × 43.6 × 13.7毫米
产品特性
电气特性:
- 电机电源/逻辑电源/ STO电源:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:15a均方根连续,28a均方根峰值电流
发动机类型:
- 无刷直流电动机(BLDC, PMSM)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈致动器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器非易失性存储器中的复杂运动序列。
-
iPOS4815 XZ-CAT 11-50V 15A RMS 1kW EtherCAT
-
-
- 智能、紧凑、可自由编程的电机控制器
- 适用于无刷、直流电刷和步进电机
- 电机电源/逻辑电源:1180 VDC / 936 VDC
- 输出电流:连续20 A;峰值电流40 A
- 支持各种反馈选项,包括Sin/Cos和绝对编码器
- 通过RS232或EtherCAT通信
- STO输入具有安全完整性等级SIL3/Cat3/PLe
- 尺寸(长×宽×高):60 × 40 × 28.2毫米
产品特性
电气特性:
- 电机电源/逻辑电源/ STO电源:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:15a均方根连续,28a均方根峰值电流
发动机类型:
- 无刷直流电动机(BLDC, PMSM)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈致动器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器非易失性存储器中的复杂运动序列。
智能汽车
- 智能无刷和步进电机的iMOT线路将智能驱动器、电机和位置传感器组合成一个单一单元。其结果是一种紧凑的经济有效的解决方案,可以将通过通信通道接收的运动指令转换为机械运动。
-
-

iMOT172S XM-CAN 12-48V 300 mm步进电机CANopen/TMLCAN
-
-
- 步进电机与嵌入式驱动器和运动控制器
- 步进电机采用可自由编程的伺服控制器
- 通过场定向控制(FOC)实现高动态和高效率
- 工作电压:1248 V /公称扭矩:300毫米
- 磁性单圈绝对编码器,4096 I / rev.(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:Molex Micro-Fit
产品特性
- 智能步进电机,内置运动控制器,驱动和位置反馈
- 高性价比的定位系统,由于紧凑和消除电机布线
- 连续扭矩:300毫米,高达1300转/分
- 空载速度:在48v 1750转/分
- 运动方式:位置和速度剖面;PVT & PT插补,电子传动装置和凸轮,外部参考:模拟或通过通信总线发送
- 使用TML (Technosoft Motion Language)进行运动编程,或使用PC或PLC的运动库
- 独立操作的完整运动程序存储在驱动器的记忆
- 交流:
- RS-232可达115kaud
- 高达1兆的can总线,具有TMLCAN或CANopen (CiA301, 305和402)协议
- 数字和模拟I/ o:
- 5位数字输入:5- 36v
- 2 .数字输出:0- 5v;0.5
- 1模拟量输入:12位分辨率,0-5 V
- 反馈设备:集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流、过温、短路、过压、欠压、I2t、控制错误
-

Imot17xs tm-can 300 MNM tmlcan & canopen
-
-
- 步进电机与嵌入式驱动器和运动控制器
- 步进电机采用可自由编程的伺服控制器
- 通过场定向控制(FOC)实现高动态和高效率
- 工作电压:1248 V /公称扭矩:300毫米
- 磁性单圈绝对编码器,4096 I / rev.(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:M8 / M12
产品特性
- 智能步进电机,内置运动控制器,驱动和位置反馈
- 步进变成了一个真正的伺服电机,由于FOC和无级技术由Technosoft
- 高性价比的定位系统,由于紧凑和消除电机布线
- 连续扭矩:300毫米,高达1300转/分
- 空载速度:在48v 1750转/分
- 运动方式:位置和速度剖面;PVT & PT插补,电子传动装置和凸轮,外部参考:模拟,或通过通信总线发送
- 使用TML (Technosoft Motion Language)进行运动编程,或使用PC或PLC的运动库
- 独立操作的完整运动程序存储在驱动器的记忆
- 交流:
- RS-232可达115kaud
- 高达1兆的can总线,具有TMLCAN或CANopen (CiA301, 305和402)协议
- 数字和模拟I/ o:
- 4路数字输入:5- 36v
- 2 .数字输出:0- 5v;0.5
- 1模拟量输入:12位分辨率,0-5 V
- 反馈设备:绝对单转集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流、过温、短路、过压、欠压、I2t、控制错误
-

iMOT172S TM-CAT 12-48V 300 mmm步进电机EtherCAT
-
-
- 步进电机与嵌入式驱动器和运动控制器
- 步进电机采用可自由编程的伺服控制器
- 通过场定向控制(FOC)实现高动态和高效率
- 工作电压:1248 V /公称扭矩:300毫米
- 磁性单圈绝对编码器,4096 I / rev.(12位)
- 接口:EtherCAT和RS232
- 连接器系统:M8 / M12
产品特性
- 智能步进电机,内置运动控制器,驱动和位置反馈
- 步进变成了一个真正的伺服电机,由于FOC和无级技术由Technosoft
- 高性价比的定位系统,由于紧凑和消除电机布线
- 连续扭矩:300毫米,高达1300转/分
- 空载速度:在48v 1750转/分
- 运动方式:位置和速度剖面;PVT & PT插补,电子传动装置和凸轮,外部参考:模拟,或通过通信总线发送
- 通信:EtherCAT与CAN应用协议的EtherCAT (CoE)
- 数字和模拟I/ o:
- 4路数字输入:5- 36v
- 2 .数字输出:0- 5v;0.5
- 1模拟量输入:12位分辨率,0-5 V
- 反馈设备:绝对单转集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流、过温、短路、过压、欠压、I2t、控制错误
-

iMOT171B XM-CAN 12-48V 80毫微米无刷电机CANopen/TMLCAN
-
-
- 嵌入式驱动和运动控制器的无刷电机
- 无刷电机与集成自由可编程伺服控制器
- 通过场定向控制(FOC)实现高动态和高效率
- 工作电压:1248 V /公称扭矩:80毫米
- 磁性单圈绝对编码器,4096 I / rev.(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:Molex Micro-Fit
产品特性
- 智能无刷伺服电机,内置运动控制器,驱动和位置反馈
- 高性价比的定位系统,由于紧凑和消除电机布线
- 3000转/分的连续扭矩:100毫米
- 运动方式:位置和速度剖面;PVT & PT插补,电子传动装置和凸轮,外部参考(模拟,或通过通信总线发送)
- 使用TML (Technosoft Motion Language)进行运动编程,或使用PC或PLC的运动库
- 独立操作的完整运动程序存储在驱动器的记忆
- 交流:
- RS-232可达115kaud
- 高达1Mbit的can总线,采用TMLCAN或CANopen (CiA301, 305和402)协议
- 数字和模拟I/ o:
- 5位数字输入:5- 36v
- 2 .数字输出:0- 5v;5 0,
- 1模拟量输入:12位分辨率,0-5 V
- 反馈设备:集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流、短路、过压、欠压、I2t、控制错误
-

Imot17xb tm-can - 100-300 MNM tmlcan & canopen
-
-
- 嵌入式驱动和运动控制器的无刷电机
- 无刷电机与集成自由可编程伺服控制器
- 通过场定向控制(FOC)实现高动态和高效率
- 工作电压:1248 V /公称扭矩:80毫米
- 磁性单圈绝对编码器,4096 I / rev.(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:M8 / M12
产品特性
- 全数字智能无刷伺服电机,内置运动控制器,驱动和位置反馈
- 高性价比的定位系统,由于紧凑和消除电机布线
- 3000转/分的连续扭矩:100毫米
- 运动方式:位置和速度剖面;PVT & PT插补,电子传动装置和凸轮,外部参考:模拟或通过通信总线发送
- 使用TML (Technosoft Motion Language)进行运动编程,或使用PC或PLC的运动库
- 独立操作的完整运动程序存储在驱动器的记忆
- 通信:高达1mbit的can总线,采用TMLCAN或CANopen (CiA301, 305和402)协议
- 数字和模拟I/ o:
- 4路数字输入:5- 36v
- 3 .数字输出:0- 5v;0.5
- 1模拟量输入:12位分辨率,0-5 V
- 标准M8和M12连接器用于can总线和I/ o
- 反馈设备:集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流、短路、过压、欠压、I2t、控制错误
-

Imot17xb tm-cat 100-300 MNM ethercat
-
-
- 嵌入式驱动和运动控制器的无刷电机
- 无刷电机与集成自由可编程伺服控制器
- 通过场定向控制(FOC)实现高动态和高效率
- 工作电压:1248 V /公称扭矩:80毫米
- 磁性单圈绝对编码器,4096 I / rev.(12位)
- RS232接口:EtherCAT
- 连接器系统:M8 / M12
产品特性
- 全数字智能无刷伺服电机,内置运动控制器,驱动和位置反馈
- 高性价比的定位系统,由于紧凑和消除电机布线
- 3000转/分的连续扭矩:300毫米
- 运动方式:位置和速度剖面;PVT & PT插补,电子传动装置和凸轮,外部参考:模拟或通过通信总线发送
- 使用TML (Technosoft Motion Language)进行运动编程,或使用PC或PLC的运动库
- 独立操作的完整运动程序存储在驱动器的记忆
- 通信:EtherCAT与CAN应用协议的EtherCAT (CoE)
- 数字和模拟I/ o:
- 4路数字输入:5- 36v
- 3 .数字输出:0- 5v;0.5
- 1模拟量输入:12位分辨率,0-5 V
- 标准M8和M12连接器用于can总线和I/ o
- 反馈设备:集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流、短路、过压、欠压、I2t、控制错误
-

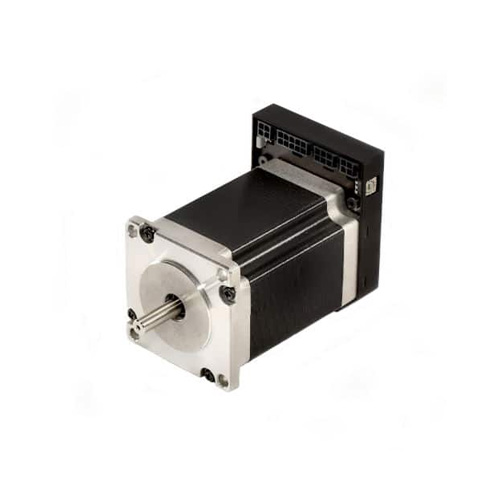
iMOT232S XM-CAN 12-48V 1.0 Nm步进电机CANopen/TMLCAN
-
-
- 智能步进器,NEMA 23
- 嵌入式驱动器和运动控制器
- 连续扭矩:1.5 Nm
- 电机供电:12.5- 48v;逻辑电源:12.5- 36v
- 集成位置传感器:4096计数/rev
- 输入:5个数字,1个模拟。输出:2的数字
- TMLCAN和CANopen通信
- 矩形连接器
产品特性
- 智能步进电机,内置运动控制器,驱动和位置反馈
- 高性价比的定位系统,由于紧凑和消除电机布线
- 连续扭矩:1.5 Nm
- 运动方式:位置和速度剖面;PVT & PT插补,电子传动装置和凸轮,外部参考:模拟或通过通信总线发送
- 使用TML (Technosoft Motion Language)进行运动编程,或使用PC或PLC的运动库
- 独立操作的完整运动程序存储在驱动器的记忆
- 交流:
- RS-232可达115kaud
- 最高可达1mbit的can总线,采用TMLCAN或CANopen (CiA301 & 402)协议
- 数字和模拟I/ o:
- 5位数字输入:5- 36v
- 2 .数字输出:0- 5v;0.5
- 1模拟量输入:12位分辨率,0-5 V
- 反馈设备:集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流、过温、短路、过压、欠压、I2t、控制错误
-

iMOT232S TM-CAN 12-48V 1.0 Nm步进电机CANopen/TMLCAN
-
-
- 智能步进器,NEMA 23
- 嵌入式驱动器和运动控制器
- 连续扭矩:1.5 Nm
- 电机供电:12.5- 48v;逻辑电源:12.5- 36v
- 集成位置传感器:4096计数/rev
- 输入:4个数字,1个模拟。输出:2的数字
- TMLCAN和CANopen通信
- 圆形连接器,M8和M12
产品特性
- 智能步进电机,内置运动控制器,驱动和位置反馈
- 高性价比的定位系统,由于紧凑和消除电机布线
- 连续扭矩:1.5 Nm
- 运动方式:位置和速度剖面;PVT & PT插补,电子传动装置和凸轮,外部参考:模拟或通过通信总线发送
- 使用TML (Technosoft Motion Language)进行运动编程,或使用PC或PLC的运动库
- 独立操作的完整运动程序存储在驱动器的记忆
- 交流:
- RS-232可达115kaud
- 最高可达1mbit的can总线,采用TMLCAN或CANopen (CiA301 & 402)协议
- 数字和模拟I/ o:
- 5位数字输入:5- 36v
- 2 .数字输出:0- 5v;0.5
- 1模拟量输入:12位分辨率,0-5 V
- 反馈设备:集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流、过温、短路、过压、欠压、I2t、控制错误
-
imo23xs tm-cat 1.0-1.5 nm ethercat
-
-
- 智能步进电机,NEMA 23
- 嵌入式驱动器和运动控制器
- 连续扭矩:1.0 mm (imo232s)/ 1.5 nm (imo233s)
- 电机供电:12- 48v;逻辑电源:12- 36v
- 位置传感器:4096计数/rev,绝对单转
- 输入:4个数字,1个模拟。输出:2的数字
- 圆形M8和M12连接器
- EtherCAT通信与CoE协议
产品特性
- 智能步进电机,内置运动控制器,驱动和位置反馈
- 步进变成了一个真正的伺服电机,由于FOC和无级技术由Technosoft
- 高性价比的定位系统,由于紧凑和消除电机布线
- 连续扭矩:1000和1600毫米
- 空载速度:1400rpm和750rpm在48v
- 运动方式:位置和速度剖面;PVT & PT插补,电子传动装置和凸轮,外部参考:模拟,或通过通信总线发送
- 通信:EtherCAT与CAN应用协议的EtherCAT (CoE)
- 数字和模拟I/ o:
- 4路数字输入:5- 36v (PNP和NPN)
- 2 .数字输出:0- 5v;0.5 A (PNP和NPN)
- 1模拟量输入:12位分辨率,0-5 V
- 反馈设备:绝对单转集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流、过温、短路、过压、欠压、I2t、控制错误
-

iMOT172B XM-CAN 12-48V 160mmnm无刷电机CANopen/TMLCAN
-
-
- 嵌入式驱动和运动控制器的无刷电机
- 无刷电机与集成自由可编程伺服控制器
- 通过场定向控制(FOC)实现高动态和高效率
- 工作电压:1248 V /公称扭矩:160毫米
- 磁单匝绝对编码器,4096 I / rev.(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:Molex Micro-Fit
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:3.1 A
- 公称扭矩:160毫米@ 4000转/分
交流:
- RS232 -高达115kbit /s
- CANopen -根据CiA档案301 305和402
- TMLCAN - technsoft专有的CAN协议
数字和模拟输入/输出:
- 5位数字输入:5- 24v, NPN或PNP可配置
- 2数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟量输入:12位,0- 5v
-

iMOT172B TM-CAN 12-48V 160mmnm无刷电机CANopen/TMLCAN
-
-
- 嵌入式驱动和运动控制器的无刷电机
- 无刷电机与集成自由可编程伺服控制器
- 通过场定向控制(FOC)实现高动态和高效率
- 工作电压:1248 V /公称扭矩:160毫米
- 磁性单圈绝对编码器,4096 I / rev.(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:M8 / M12
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:3.1 A
- 公称扭矩:160毫米@ 4000转/分
交流:
- RS232 -高达115kbit /s
- CANopen -根据CiA档案301 305和402
- TMLCAN - technsoft专有的CAN协议
数字和模拟输入/输出:
- 4位数字输入:5- 24v, NPN或PNP可配置
- 2数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟量输入:12位,0- 5v
-
iMOT172B TM-CAT 12-48V 160mmm无刷电机EtherCAT
-
-
- 嵌入式驱动和运动控制器的无刷电机
- 无刷电机与集成自由可编程伺服控制器
- 通过场定向控制(FOC)实现高动态和高效率
- 工作电压:1248 V /公称扭矩:160毫米
- 磁单匝绝对编码器,4096 I / rev.(12位)
- RS232接口:EtherCAT
- 连接器系统:M8 / M12
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:3.1 A
- 公称扭矩:160毫米@ 4000转/分
交流:
- RS232 -高达115kbit /s
- EtherCAT -在EtherCAT (CoE)协议上具有CANopen
数字和模拟输入/输出:
- 4位数字输入:5- 24v, NPN或PNP可配置
- 2数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟量输入:12位,0- 5v
-

iMOT173B XM-CAN 12-48V 240毫微米无刷电机CANopen/TMLCAN
-
-
- 嵌入式驱动和运动控制器的无刷电机
- 无刷电机与集成自由可编程伺服控制器
- 通过场定向控制(FOC)实现高动态和高效率
- 工作电压:1248 V /公称扭矩:160毫米
- 磁单匝绝对编码器,4096 I / rev.(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:Molex Micro-Fit
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:3.1 A
- 公称扭矩:160毫米@ 4000转/分
交流:
- RS232 -高达115kbit /s
- CANopen -根据CiA档案301 305和402
- TMLCAN - technsoft专有的CAN协议
数字和模拟输入/输出:
- 5位数字输入:5- 24v, NPN或PNP可配置
- 2数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟量输入:12位,0- 5v
-

iMOT173B TM-CAN 12-48V 240毫微米无刷电机CANopen/TMLCAN
-
-
- 嵌入式驱动和运动控制器的无刷电机
- 无刷电机与集成自由可编程伺服控制器
- 通过场定向控制(FOC)实现高动态和高效率
- 工作电压:1248 V /公称扭矩:160毫米
- 磁性单圈绝对编码器,4096 I / rev.(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:M8 / M12
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:3.6 A
- 公称扭矩:240毫米@ 4000转/分
交流:
- RS232 -高达115kbit /s
- CANopen -根据CiA档案301 305和402
- TMLCAN - technsoft专有的CAN协议
数字和模拟输入/输出:
- 4位数字输入:5- 24v, NPN或PNP可配置
- 2数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟量输入:12位,0- 5v
-

iMOT173B TM-CAT 12-48V 240毫米无刷电机EtherCAT
-
-
- 嵌入式驱动和运动控制器的无刷电机
- 无刷电机与集成自由可编程伺服控制器
- 通过场定向控制(FOC)实现高动态和高效率
- 工作电压:1248 V /公称扭矩:160毫米
- 磁单匝绝对编码器,4096 I / rev.(12位)
- RS232接口:EtherCAT
- 连接器系统:M8 / M12
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:3.1 A
- 公称扭矩:240毫米@ 4000转/分
交流:
- RS232 -高达115kbit /s
- EtherCAT -在EtherCAT (CoE)协议上具有CANopen
数字和模拟输入/输出:
- 4位数字输入:5- 24v, NPN或PNP可配置
- 2数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟量输入:12位,0- 5v
-
iMOT233S XM-CAN 12-48V 1.6 Nm步进电机CANopen/TMLCAN
-
-
- 步进电机与嵌入式驱动器和运动控制器
- 步进电机采用可自由编程的伺服控制器
- 通过场定向控制(FOC)实现高动态和高效率
- 工作电压:1248 V /公称扭矩:1.6 Nm
- 磁性单圈绝对编码器,4096 I / rev.(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:Molex Micro-Fit
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:2.8 A
- 公称扭矩:1.6 Nm @ 750 rpm
- 空载速度:1400转@ 48 VDC
交流:
- RS232 -高达115kbit /s
- CANopen -根据CiA档案301 305和402
- TMLCAN - technsoft专有的CAN协议
数字和模拟输入/输出:
- 5位数字输入:5- 24v, NPN或PNP可配置
- 2数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟量输入:12位,0- 5v
-

iMOT233S TM-CAN 12-48V 1.6 Nm步进电机CANopen/TMLCAN
-
-
- 步进电机与嵌入式驱动器和运动控制器
- 步进电机采用可自由编程的伺服控制器
- 通过场定向控制(FOC)实现高动态和高效率
- 工作电压:1248 V /公称扭矩:1.6 Nm
- 磁性单圈绝对编码器,4096 I / rev.(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:M8 / M12
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:2.8 A
- 公称扭矩:1.6 Nm @ 750 rpm
- 空载速度:1400转@ 48 VDC
交流:
- RS232 -高达115kbit /s
- CANopen -根据CiA档案301 305和402
- TMLCAN - technsoft专有的CAN协议
数字和模拟输入/输出:
- 4位数字输入:5- 24v, NPN或PNP可配置
- 2数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟量输入:12位,0- 5v
-

iMOT233S TM-CAT 12-48V 1.6 Nm步进电机EtherCAT
-
-
- 步进电机与嵌入式驱动器和运动控制器
- 步进电机采用可自由编程的伺服控制器
- 通过场定向控制(FOC)实现高动态和高效率
- 工作电压:1248 V /公称扭矩:1.6 Nm
- 磁性单圈绝对编码器,4096 I / rev.(12位)
- RS232接口:EtherCAT
- 连接器系统:M8 / M12
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:2.8 A
- 公称扭矩:1.6 Nm @ 750 rpm
- 空载速度:1400转@ 48 VDC
交流:
- RS232 -高达115kbit /s
- EtherCAT -在EtherCAT (CoE)协议上具有CANopen
数字和模拟输入/输出:
- 4位数字输入:5- 24v, NPN或PNP可配置
- 2数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟量输入:12位,0- 5v
微型汽车

-
无槽无刷直流电机
- 与传统直流电机相比,Technosoft无芯直流电机具有效率高、机械时间短、惯性小等主要优点。因为核心它s构造没有铁和质量它s低,它有能力加速和减速比任何其他直流电机更快。无铁消除了齿槽和无芯电机运行平稳,即使在低速。我们为客户提供的优势之一是模块化,因为他们可以配备齿轮头,编码器和驱动器,为您的需求提供完整的解决方案。我们设法以较低的价格提供了您想要的性能。电机规格,组装选项和配件可以在微型电机的完整目录中找到
- 平滑控制
- 小尺寸(Ø8, Ø10, Ø13, Ø16, Ø17和Ø24 mm)
- 高扭矩
- 高速
- 模块化设计
- 无齿槽定位转矩
- 低体重
- 成本效益
-

TSU13026
-
- 无槽无刷直流电机,F13mm, 2.8 mm, 20000rpm
-

TSU13038
-
- 无槽无刷直流电机,F13mm, 5.5 mm, 20000rpm
-

TSU16036
-
- 无槽无刷直流电机,Ø16mm, 9.4 mmnm, 14000rpm
-

TSH16056
-
- 无槽无刷直流电机,F16mm, 13.2 mmnm, 46000rpm
-

TSU22048
-
- 无槽无刷直流电机,F22mm, 33.1 mm, 17000rpm
-

TSH22045
-
- 无槽无刷直流电机,f22毫米,21.2毫米,37000rpm
-

TSH22060
-
- 无槽无刷直流电机,f22毫米,33.8毫米,36000转/分
无芯刷直流电机
- 创新自主专利的无铁电机绕组设计,体积小巧,功率高。无刷电机有两个版本,以满足广泛的应用要求:TSU版本专门用于标准速度和扭矩应用,而TSH模型已优化为更高的速度。此外,该电机具有低噪声、低惯性和短响应时间,可满足任何动态应用。典型的无刷电机的定子是用槽构造的,定子绕组是围绕着槽形成的,这一技术是众所周知的,随之而来的问题是不可忽视的。主要问题是齿槽转矩,这是一个挑战的应用,需要快速响应,快速加速,平稳运行。
- 无铁心的绕组
- 小尺寸(Ø13, Ø16, Ø22 mm)
- 高扭矩
- 高速
- 模块化设计
- 长期运行寿命
- 成本效益
- 沉默的操作
-

TCU08017
-
- 无芯有刷直流电机,Ø8mm, 0.6 mmnm, 5400rpm
-

TCU10017
-
- 无芯有刷直流电机,Ø10mm, 0.71 mmnm, 5000rpm
-
TCU10025
-
- 无芯有刷直流电机,Ø10mm, 1.63 mm, 6700rpm
-

TCU13020
-
- 无芯有刷直流电机,Ø13mm, 1.83 mmnm, 8600rpm
-

TCU13028
-
- 无芯有刷直流电机,Ø13mm, 3.48 mmnm, 7900转/分
-

TCU16025
-
- 无芯有刷直流电机,Ø16mm, 2.23 mmnm, 8100rpm
-

TCU17025
-
- 无芯有刷直流电机,Ø17mm, 3.89毫微,8200转/分
-

TCU17035
-
- 无芯有刷直流电机,Ø17mm, 7.72 mmnm, 9000rpm
-

TCU24032
-
- 无芯有刷直流电机,Ø24mm, 10.92 mmnm, 8000rpm
行业
- 智能无刷和步进电机的iMOT线路将智能驱动器、电机和位置传感器组合成一个单一单元。其结果是一种紧凑的经济有效的解决方案,可以将通过通信通道接收的运动指令转换为机械运动。
-
-

医疗
-
- Technosoft在定制运动解决方案方面的基准贡献是领先医疗应用的一部分,例如:
- 临床诊断
- 手术器械和机器人
- 离心泵
- x光设备
- 生物
- 眼科设备
对于医疗行业的零部件制造来说,质量控制的制造工艺是零部件系列化生产和使用的绝对要求。因此,我们的开发团队集中精力扩展过程监控系统。科技软件通过iso9001:2008认证。
-

仪器和光学
-
- Technosoft在定制运动解决方案方面的基准测试贡献是领先的仪器和光学应用的一部分,例如:
- 数码显微镜
- 激光测量系统
- 鸟瞰图相机
- 光度法
- 镜片整形抛光
- 自动对焦和自动缩放
-
机器人
-
- 机器人运动控制解决方案
- 机器人和cobots
- 外骨骼
- 叨纸牙
- 自动导向车辆(agv)
- 仓库自动化
-

实验室自动化
-
- 实验室自动化运动控制解决方案
-

工厂自动化
-
- 工厂自动化的运动控制解决方案
- 拾取和放置机器人
- 笛卡儿的机器人
- 焊接机器人
- 印刷设备
- 焊接系统
- 激光打标
- 晶片检查
-
半导体设备
-
- 半导体设备运动控制解决方案
-

包装
-
- 为包装市场提供运动控制解决方案
-
工业设备
-
- 运动控制解决方案
- 电梯
- 电梯门
- 太阳能电池
- 液压泵
- 太阳能追踪器
- 伏打板照片
-

纺织
-
- 纺织运动控制解决方案











































































