Hirata Engineering Europe
Videos
Loading the player ...
Product Portfolio
Applications
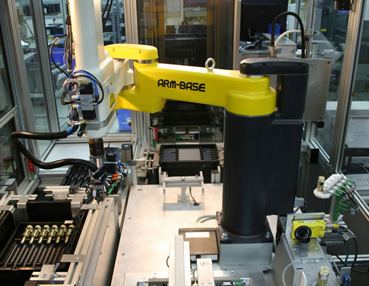
- From stand-alone robot to entire customized system – your way to your solution
Hirata has not only offered stand alone robots since 1978, but also conveyors, feeders and entire suitable robotized systems.
We create optimum automatic systems for your needs providing full technical and engineering support. We are planning, designing and building the system. Finally our automation experts are ready to install the system and to teach your operators.
Do you have a current project for automation – don’t hesitate to contact us.
For some typical requirement we have semi-standardized solutions like soldering robots, palletizer and insertion robots for odd shaped electronical components.
Turn-key Palletiser cell
- Do you have a task of palletising or depalletising, which you want to automize?
Our palletiser can work with different tray types as deep drawn or foam plastic material or sheet metal. We are offering the entire Engineering including robot technology, grippers and other feeders.
Assembly
- One of our main application area is Assembly. Basically we are specialize to handle work pieces with a volume of 100 mm x 100 mm x 100 mm and a weight of less then 5 kg. The cycle time of one piece handling is within 2 to 30 s and the accuracy of insertion is +/- 0.05 mm.
-
-
-
Assembly of small magnetic clutch
-
- System description:
This system is designed to assembly a small magnetic clutch which is used in household appliances. The machine consists of a turning table, two assembly robots, feeders, presses and adhesive dispenser.
- Feeding of work pieces by tray feeder and bowl feeder
- 胶粘剂的应用
- Assembly of magnets
- Press in of sinter bearings
- Automatic Optical inspection
- Assembly of the clutch
- Palletising of finished clutch
Adhesive bonding and Adhesive potting
- In case of dispensing of adhesive we differ between Potting and bonding/Beading. For both processes we are offering solutions for 1K and 2K material and are using well known dispenser makers.
For poisitioning the dispenser head we are using Cartesian robots because of high path accuracy and higher payload. Also piping from pump to dispenser is much easier then other robot mechanism.
-

Applying plastic compound
-
- System description:
This is a full-automated cell where the work piece will be feed in and out by a PCB conveyor. The robot moves the dispenser in u-shaped path to apply 1K material around a sensor. The speed of dispensing and motion have to be exactly synchronized. The dosage of material will be controlled by a laser sensor. Additionally the applied amount will be checked by a gauge.
-

Dispensing of 1K material
-
- System description:
This is a semi-automated cell with manual feed in and out of work pieces. The robot perform a CPC motion and applies 1K material like a bead. High precision of motion and dispensing is necessary to achieve the required quality. A second robot with a laser band scanner checks the bead.
Measurement and Testing
- An important process is measurement and testing within production. You can handle either the work piece by robot to bring it to the test equipment or robot can carry the probe and bring it to the work piece.
-
-
Automated measurement within production
-
- System specifications
| robot model: |
AR-S 550 |
| Tray feeder model: |
AST 700 |
| Tray size: |
400 mm x 300 mm |
| Tray material: |
deep drawn plastic |
| Cycle time: |
16s each work piece |
| Payload: |
200 g |
System description:
The robot handles the work piece and places it into the test jig. During testing the robot places the tested work piece into the tray and picks up a new untested piece.
Odd shaped component insertion
-
-
-
PCB insertion of odd shaped components
-
- We are offering full-automated system with robots for odd shaped component insertion. This cell consists of feeders, PCB conveyor, Insertion and Clinch robot.
Soldering robot
-
-
-
Soldering robot cell LRZ series
-
- Soldering robot cell LRZ series Video: soldering robot
The soldering robot cell, LRZ series, is developed for stable and better quality for soldering process at the same or even less cycle time than manual soldering.
The typical soldering processes are:
- Touch-up or resoldering of solder spot after soldering bath
- Soldering on the component side of PC board for jumper wires, connectors, switches and so on
- Making solder joints between PCB
- Making solder joints between pins and housing on the board
- Making solder joints between metal frame and PCB
- Soldering of odd shaped components with leads at SMD- PCB
On your specific requirements we design and integrate the entire soldering robot cell including conveyor system, fixtures or turning tables for presenting the work piece to the soldering robot.
The soldering robot cell consists of the soldering tool, the SCARA or cartesian robot, touch screen operation panel, robot base and safety fence.
For the stable soldering process control we are using the robot controller. This cell controller using HARL-III robot language for the optimized soldering motion and to set individual solder parameters at each spot such as pre/postheating times soldering times and cleaning cycles. The soldering spots are programmed by Teach-in method and the solder parameters can be entered by touch screen panel.
Products
Auto stocker
-
-
-
Auto stocker
-
- For automatic production systems a parts feeder to robot is one of an important element. If orientation and position of work pieces are not accurate, automatic system will not run efficiently. Frequently, sensitive or odd-shaped parts are not suitable for bowl feeders and vision systems will not be economical solution. These parts should be presented by trays which are available in the market and easy to transfer a reuse.
Hirata’s Auto Stocker solves your tray feeding problem economically. The Auto Stocker is designed as tray changing system to palletize or depalletize work pieces by robot. Its accurate positioning, fast tray change time and sufficient storage of trays meet the requirement of your automatic production system. The typical applications for the Auto Stocker are for assembly operation, palletizing for injection moulding machines and loading/unloading work pieces for machine tools.
- High Efficiency:The palletizer in combination with SCARA robot or Gantry robot is able to load or unload trays. Tray feeders for tray dimensions between 300 mm x 200 mm up to 800 mm x 600 mm are available. The maximum of tray stack weight could be 200 kg.
- Small footprint:The tray feeder model AST has a very small footprint and save a lot of factory space because the tray flow is vertically.
- Full automation:In combination with a AGV tray feeders can be load and unload automatically.
SCARA robots
- The robot models of AR-F series are four axes SCARA robots which are very well suitable for fast and flexible assembly and handling tasks. The AR-F series is the sixth generation of SCARA robot which Hirata developed and perform newest technology and long lasting experiences. Best features and high economy are characterizing these robot series. There are three models with different arm length of 450 mm, 500 mm and 650 mm available.
- High acceleration and speed:The AR-F series perform a standard cycle time of 0.28 s.
- Battery less encoder technology:Battery less Encoders makes maintenance easy and conserves the environment.
- Automatic acceleration calculation:Optimized motion by automatic calculation of acceleration and deceleration time.
-
-
AMR-450H
-
-

AR-F450
-
-

AR-F500
-
-

AR-F650
-
Semiconductor production equipment
-

Cleanroom robots
-
- The development and manufacturing of the clean room robots based on the long and detailed experiences of Hirata’s robot technology. These robots can be easily and very efficiently integrated into automatic semiconductor machine. The robots are conform with mandatory SEMI standards.
- Small foot print:
Therefore no disturbance of laminar air flow inside of clean room.
- Optimized Motion features:
Therefore higher throughput possible.
- Optional Flap device:
With optional flap device wafer can be turned upside down.
- Maintenance less robot arm:
No greasing, low maintenance cost
-

EFEM
-
- EFEM——设备前端模块是关键wafer handling units consist of robot, pre-aligner, load ports and machine housing. The design and functions are adapted to customer’s requirement.
- High Throughput
- Small foot print
- Certified according ISMI 2009
-

Prealigner
-
- Wafer can be centred and orientated by Hirata’s pre-aligner.
- Touchless and sensor controlled
- Very quick and high precisely orientation of standard and notch wafers
- 晶片尺寸选择:6”,8”,12”和8 / 12
-

FOUP
-
- Our FOUP openers are designed for handling of FOUP (Front Opening Unified Pods) and FOSB (Front Opening Shipping Boxes) and are available for wafer size 8” and 12”.
- Reliable opening and closing of FOUP and FOSB
- Integrated mapping function
For wafer sizes 8”, 12” and 18”
Cartesian robots
- A building block system of different linear axes offers a great variation of possible axis configuration and combination. These robots are mainly used for working tool and work piece handling..
- Solid and robust structure:
Reliable and long-lasting operation
- Batteryless Encoder technology:
Batteryless Encoders makes maintenance easy and conserves the environment .
- Various possibilities of configuration:
many selections in strokes, speed and payload
-

1 axis
-
- MB
linear axis for horizontal mounting position
MB-V
linear axis for vertical mounting position
-

2 axes CR type
-
- CR
X-Y system fixing Y axis frame to X axis slider
CRT
X-Y system with mobile Y axis at X axis slider
MV, MZC, MZF
X-Z system with vertical stroke > 300, 500, 700 mm
MZQ
X-Z system with vertical stroke 200 or 350 mm
-

3 axes CRZC type
-
- CRZC, CRZF
x y z系统vertical stroke > 300, 500, 700 mm
CRZQ
x y z系统vertical stroke 200 or 350 mm
MWQ
X-Z-W system with wrist axis and vertical stroke 200 or 350 mm
-

4 axes
-
- CRWQ
X-Y-Z-W system with vertical stroke 200 or 350 mm
-
Gantry robots
-
- The Gantry robots with three axes are configurable according customer’s need. These robots are able to carry heavy load and have long stroke option. They are very robust and have a high stability.
- Solid and robust structure:Low maintenance, payload 50 to 150 kg
- Batteryless Encoder technology:Batteryless Encoders makes maintenance easy and conserves the environment.
- Various possibilities of configuration:many selections in strokes, speed and payload.
Assembly cell
-
-
-
Assembly cell
-
- Assembly Cell ACS-MD is a modular structured production system for manufacturing of small electrical and electronic devices and units. These cells can be used as a standalone machine or can be combined together to an entire production line.
Controller and software for robots and handling devices
-

Controller
-
- The controller provides all functions of a motion control and the ability to control the entire peripheral devices. Thereby it is not necessary to use a PLC for sequence control. The controller is a micro processor system which is working with multi tasking.
-

Teach pendant
-
- The Teach pendant can be connected to all control models. It can be used for operation and position programming of robots. The Teach pendant can be connected and disconnected if required.
-

Programming enviroment
-
- The software package HBDE (Hirata BASIC Development Enviroment) are used to develop application software and for debugging of programs. The programming language is based on BASIC and very easy to learn. It provides structured programming, subroutines, Marco commands and a lot of powerful commands.

































