- Offer Profile
- 欢迎来到高级驾驶员援助系统研究小组,该研究小组是位于西班牙巴塞罗那大学的计算机视觉中心的一部分。
Our group is focused on combining computer vision techniques as pattern recognition, feature extraction, learning, tracking, 3D vision, etc. to develop real-time algorithms able to assist the driving activity.
Product Portfolio
项目

- 智能车辆参考汽车,卡车,公共汽车等。在哪些传感器和控制系统上进行了集成以协助驾驶任务,因此他们的名字高级驾驶员援助系统(ADAS)。
The aim is to combine sensors and algorithms to understand the vehicle environment so that the driver can receive assistance or be warned of potential hazards. Vision is the most important sense employed for driving, therefore cameras are the most used sensor in these systems.
In this context, our group is focused on combining computer vision techniques as pattern recognition, feature extraction, learning, tracking, 3D vision, etc. to develop real-time algorithms able to assist the driving activity. Examples of assistance applications are: Lane Departure Warning, Collision Warning, Automatic Cruise Control, Pedestrian Protection, Headlights Control, etc.
The group was founded in year 2002, and it is leaded by Dr Antonio M. López. The group is composed by nine doctors and and thirteen PhD students. Currently the group is supported by: Spanish Ministry of Education and Science (MEC) Research Project TRA2011-29454-C03-00.
-
-
Lanemakings
-
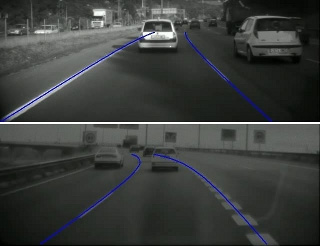
- Detection of lane markings based on a camera sensor can be a low cost solution to lane departure and curve over speed warning. A number of methods and implementations have been reported in the literature. However, reliable detection is still an issue due to cast shadows, wearied and occluded markings, variable ambient lighting conditions etc.
我们专注于提高检测的可靠性,同时计算相关的道路几何参数,例如曲率,车道WITDH和车道内的车辆位置。视频序列是按框架处理的,即没有实施时间连贯性或连续性。我们的方法至少能够在40毫秒时运行。
-
-
Pedestrians
-
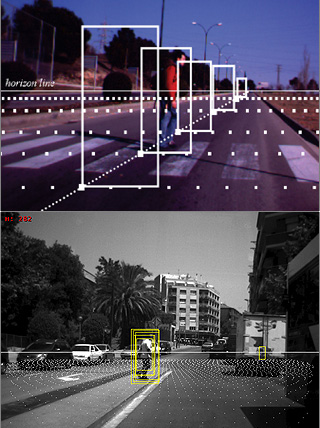
- Pedestrian accidents are the second source of traffic injuries and fatalities in the European Union. In this sense, advanced driver assistance systems (ADAS), and specifically pedestrian protection systems (PPS), have become an important field of research to improve traffic safety. Of course, in order to avoid collisions with pedestrians they must be detected, being camera sensors key due to the rich amount of cues and high resolution they provide.
目前,有两种主要的工作,一个基于可见光谱的图像,另一个基于夜间的夜间,基于热红外。前者积累了更多的文献,因为CCD或CMOS传感器在可见频谱中的可用性更容易,其价格较低,信噪比和分辨率更好,并且大多数事故发生在白天。目前,我们使用此可见频谱图像。
在这种背景下,差异iculties of the pedestrian detection task for PPS arise both from working with a mobile platform in an outdoor scenario, recurrent challenge in all ADAS applications, and from dealing with a so aspect-changing class like pedestrians. Difficulties can be summarized in the followings:
- targets have a very high intra-class variability (e.g., clothes, illumination, distance, size, etc.);
- 背景可能会混乱并在毫秒内变化;
- targets and camera usually follow different unknown movements;
- and fast system reaction together with a very robust response is required.
-

-
Video Matching
-
- 可以将两个序列的视频同步表示为它们的时间维度的对齐,也就是说,在第二个视频中的第一个视频中,在第一个视频中找到(离散的)映射c(t1)= t2,这样在第二个视频中,时间C(T1)在时间C(T1)上,第一个视频的框架最适合其相应的帧。
The final goal is the comparison of videos: find out what's different on a pair of videos shot by moving platorm which has followed more or less similar trajectories. This is possible because once two videos are synchronized and under certain assumptions, corresponding frame pairs can be spatially registered. Therefore, the two videos can be compared pixel-wise.
We are exploring two possible applications of video comparison: outdoor surveillance at night and the comparison of vehicle headlights systems:
- Outdoor surveillance at night
- Comparison of vehicle headlights systems
- 道路细分
-
-
Headlights comparsion
-
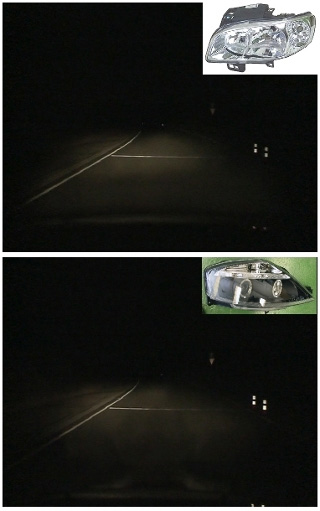
- Headlights are an important active safety element of vehicles. As such, they are continuously improved by the automotive component manufacturers. This poses the problem of how to assess them. An important step in the evaluation of a headlights system consists in the actual experience of driving at night along a test track while observing their behaviour with regard features like the lateral and longitudinal reach of the low beams and the homogeneity of the light cast on the road surface.
Dynamic headlights assessment is usually relative, that is, the performance of two headlights are compared. This comparison could be greatly facilitated by recording videos of what the driver sees, with a camera attached to the windshield screen. The problem now becomes how to compare a pair of such sequences. Two issues must be addressed: the temporal alignment or synchronization of the two sequences, and then the spatial alignment or registration of all the corresponding frames. We propose a semiautomatic but fast procedure for the former, and an automatic method for the later.
In addition, we explore an alternative to the joint visualization of corresponding frames called the bird's view transform, and propose a simple fusion technique for a better visualization of the headlights differences in two sequences.
-
-
智能大灯
-
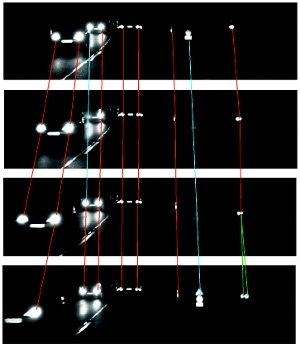
- 智能车辆照明系统旨在自动调节头灯的光束角度,以便在尽可能多的路线上照亮前方的道路,同时避免令人眼花azz乱的其他驾驶员。这种系统的关键组成部分是计算机视觉软件,能够将车辆头部和后光与源自路灯和反射元件(例如电线杆和交通标志)的斑点区分开。
我们已经设计了一组专门的监督分类器,以基于与其强度和形状相关的BLOB功能做出此类决策。根据超过60.000斑点的训练集(!),我们确实区分了大灯,尾灯,杆子和交通唱歌。
尽管总体表现良好,但仍有具有挑战性的案例尚未解决,这阻碍了这种系统的采用。值得注意的是,微弱而微小的斑点对应于相当远的车辆,这些车辆不时失望和出现。分类错误的原因之一是它是独立于其他框架进行的。因此,我们通过跟踪斑点来解决该问题,以便为1)沿其轨道获得更多特征测量值,2)计算运动特征,我们认为这与分类相关,3)执行其时间一致性。我们的跟踪方法涉及斑点的阻塞以及分裂和合并。








