Videos
Loading the player ...
- 提供个人资料
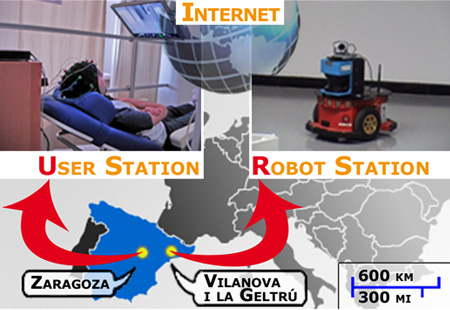
- The first week of June 2008 a research team of the University of Zaragoza achieved a brain-actuated robot teleoperation between two remote cities (260km). During one week, five subjects used the brain-machine interface to develop navigation and visual exploration tasks with the robot in a remote place. The non-invasive method to record the human neural activity was the EEG, the communication channel between Zaragoza and Barcelona was internet, and the mobile robot was equipped with an orientable camera and an autonomous navigation system.
产品介绍
Zaragoza神经技术项目
- Zaragoza大学的神经技术实验室在“神经技术”领域具有广泛的知识,在实时检测脑状态和各自的数据分析方法以及实验性脑成像技术方面具有经验(尤其是EEG和MEG)随着技术的发展。这项研究的技术应用领域是神经心理(机器人技术)和神经疗法(神经反馈)。
-

Brain-actuated Robot Wheelchair
-
- In this project, it was constructed a brain-actuated robotic wheelchair to provide people with severe neuromuscular disabilities a certain degree of mobility. During operation, the user faces a screen displaying a real-time virtual reconstruction of the scenario and concentrates on the location to be reached. The electroencephalogram (EEG) signal processing detects the user’s intents, which are transferred to the autonomous navigation system that drives the wheelchair to the desired location while avoiding collisions with obstacles detected by the sensors. This concept gives the user the flexibility to operate the device even in unknown or evolving scenarios. The prototype has been tested and validated with users at the University of Zaragoza
-
脑部驱动机器人电视系统
-
- 该项目探讨了偏僻的用户在远程方案中脑部驱动器机器人的好处。这些患者 - 无法离开临床环境 - 提供了一个体现在真实环境中(世界上互联网访问的任何地方)的物理实体,随时可以感知,探索,操纵和相互作用,仅受大脑活动控制。该系统的基本想法是,脑计算机系统将用户的意图解码;此类意图通过Internet传输到机器人系统,最后,机器人自动执行任务。用户可以在导航模式(控制机器人运动),勘探模式(控制相机方向)和交互模式(通过声音和短表达式交互)之间交替交替。该设备已由Zaragoza大学的用户评估了机器人巴塞罗那理工大学,以及患者图宾根大学with the robot at the University of Zaragoza.
-

Brain-Actuated Robotic Arm Prosthesis
- 这个研究项目的总体目标to develop a new generation of brain-controlled robotic arms, which operate using more natural and intuitive control strategies. This project focuses on augmenting human capabilities compensating for reduced motor functions, in particular for those users who need autonomous manipulation and grasping. The results will be demonstrated by users performing daily manipulation tasks at home using the brain-controlled robotic arm. Furthermore, this project is coordinated with theFaktronik Foundation,这将开发功能刺激系统(FES),以实现患者手臂的运动作为机器人臂的替代方案。
-
低成本机器人的脑部攻击
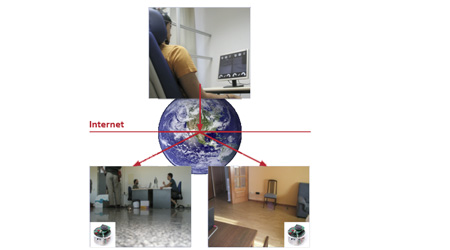
- This project explores the benefits of a brain-actuated telepresence system with several low-cost robots located in different and remote places. The developed system allows the user to control simultaneously the motion of two robots located anywhere in the world (with Internet connection) only through brain activity, also providing the user with the functionality of interaction. The mobile robots are low-cost systems, portable (fits into one hand) and equipped with a mobile phone camera. The prototype has been tested and validated by users at the University of Zaragoza.
-
大脑计算机界面软件体系结构
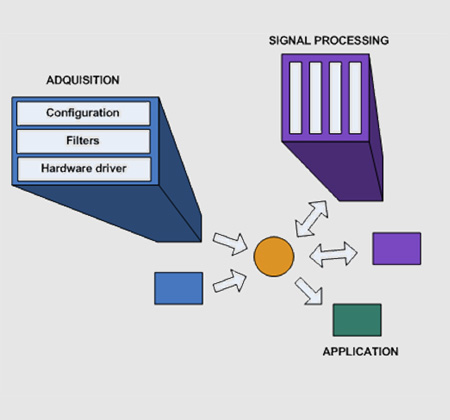
- 该项目探讨了新的软件体系结构的好处,该架构围绕着脑部计算机界面和神经反馈应用程序,绕开了现有的局限性。正在开发一个模块化,灵活和便携式体系结构,该体系结构将支持从多个硬件设备中获取信号,同步它们,并同时将几种信号处理算法应用于不同的应用程序。此外,它将根据脑部计算机界面需求以及与机器人体系结构和其他常见相互作用框架的互操作性提供共同的功能。
-
Machine Learning for Brain Computer Interfaces
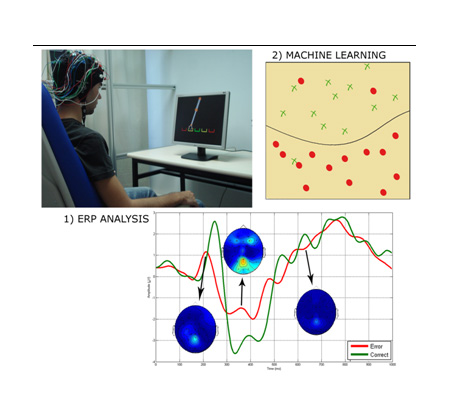
- 在该项目中,正在开发机器学习技术来识别和检测在线神经生理事件,这对于基于脑电图的大脑计算机界面很有意义。在单个试验中,已成功开发了技术来识别在线P300和与错误相关的电位。这些技术基于几个空间过滤器和最先进的监督模式识别策略,以使每个特定用户的性能以及在不同日期处理脑电图的非阶段性。结果已应用于机器人控制和在线错误检测和校正。
-
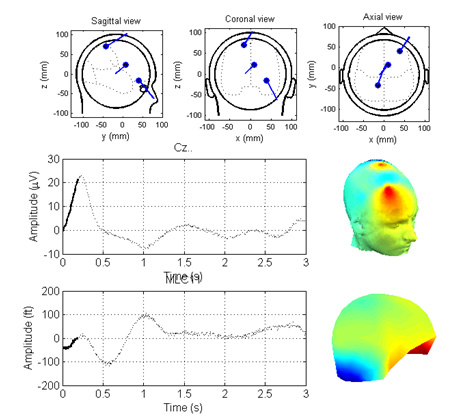
Dynamic Source Localization methods for EEG and MEG
- In this project, new methods are being developed to localize the neural processes of the dynamic brain activity by using simultaneous electroencephalography (EEG) and magnetoencephalography (MEG) recordings or each modality by itself. For such, a methodology was developed for solving the source localization problem considering the dynamic nature of the neural activation within a Bayesian framework. The advantages of the approach are: (1) the variable multidimensionality of the problem is dealt with, (2) different brain dynamics in different areas are dealt with simultaneously, and (3) it is real-time. The technique has been validated using simulated EEG and MEG data from realistic neurophysiologic conditions and transition of brain activations, and also by real EEG and MEG data recorded during a specific neurophysiologic protocol designed to elicit error-related potentials. The approach is being tested using different neurophysiologic protocols and addressing such common problems as the identification of epileptic focus.
-
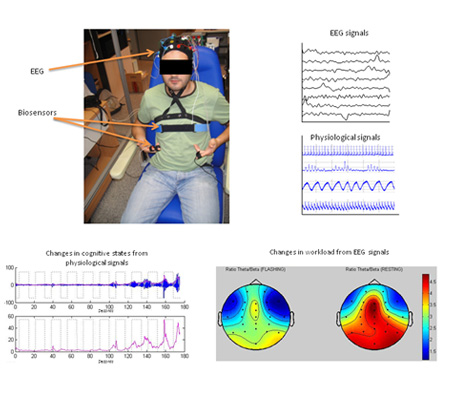
Identification of Cognitive States with a Brain Computer Interface and Biosignals
- In this project an automatic system is being developed to recognize cognitive states (relaxation, stress, etc) through physiological recordings (electrocardiogram, skin conductivity, body temperature, breathing, etc.) and EEG signals. This system is used to perform physiologic understanding and evaluation of users while using a BCI system. This type of system is relevant in order to improve the user-machine adaptability, performance, and robustness. The system is being tested with ALS patients in collaboration with the图宾根大学. The evaluation results of the telepresence robot showed that while the patient used the P300 BCI to control the robot, various cognitive states, such as relaxation and stress, and also changes between the “alert” and “distracted” states could be identified.
-

Neurofeedback focused on Attention Deficit-Hyperactivity Disorder (ADHD)
- ADHD是一种精神障碍,据报道,在美国约有7%的儿童中受苦。尽管绝大多数研究表明药理学治疗可以对其核心症状产生积极影响,但(i)大约25%的患者表现出不良反应或没有反应,(ii)没有证据表明临床改善继续在没有持续的长期治疗和(iii)的情况下,用兴奋剂的长期治疗涉及风险。在该项目中,基于EEG的脑部计算机界面系统被开发为用于治疗多动症核心症状的临床疗法。EEG生物反馈涉及运作调理技术的应用,为患者提供某些“神经反馈行为”的视觉和听觉“反馈”,从而在特定频带内加强或抑制电生理活性,这可能会产生持续的临床益处。










