- 提供配置文件
- 屡获殊荣的瑞士AI实验室IDSIA机器人实验室成立于2007年。这是一个将人工智能方法应用于各种类型的真实机器人的实验室:移动机器人、操纵机器人、人形机器人。该实验室位于瑞士Manno-Lugano的SUPSI基地。
产品组合
学习机器人
-
-
- 在部分可观察环境中的学习机器人
一些硬连接的、预先编程的机器人,如慕尼黑工业大学的人形双足行走机器人和慕尼黑工业大学的快速机器人汽车,执行着令人印象深刻的任务。但它们不像人类那样学习。
那么我们如何让他们从经验中学习呢?不幸的是,传统的强化学习算法仅限于简单的反应性行为,并不能很好地应用于现实机器人。
机器人在现实环境中的学习需要新颖的算法来学习识别感官输入流中的重要事件,并在自适应、动态、内部状态下暂时记忆它们,直到记忆可以帮助计算适当的控制动作。
我们相信,在学习记忆方面最有前途的方法是我们的循环神经网络、策略梯度和最优有序问题解决器。一个雄心勃勃的长期目标是为真正的学习机器人实现一个成熟的Gödel机器。我们CoTeSys小组的研究课题包括:DLR人工手和iCub婴儿机器人的人工好奇心和创造力,AM 180cm行走两足动物的行为进化,自适应移动机器人和机器人汽车的视觉注意力和无监督学习和序列学习,人类与学习机器人互动的安全性。
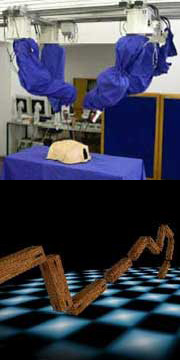
我们不仅研究真实的机器人,也研究虚拟机器人,它们生活在三维视频游戏般的世界中,具有相当逼真的模拟物理。我们也对非轮式学习机器人感兴趣,比如人造蛇。它们的导航问题比有轮子的要难。另一方面,他们可以应对崎岖的地形。
-
生物形态可变刚度
- 刚度和弹性如何提高人类和机械臂的性能?我们的目标建模研究将结合详细的生物物理模型和机器学习,以实现具身的,高维的,可变阻抗机器人系统的最佳控制。
许多工业机器人比人类强壮得多,但也非常不灵活。例如,人类可以把物体扔得更远,接得更优雅,暂时将能量储存在有弹性的肌腱和肌肉中。然而,这种灵活的执行器需要比传统机器人使用的更复杂的控制算法。STIFF联盟的目标是通过理解和模仿人类中枢神经系统有效使用的可变刚度范式,装备一个高度仿生的机器人手臂系统,具有敏捷性、健壮性和多功能性,这些都是人类运动系统的标志。我们研究的一个关键组成部分将是解剖学上精确的人类手臂和手的肌肉骨骼模型。该项目将开发新的方法来理解人类手臂如何适应其阻抗,例如,通过改变联合收缩水平或适应反射增益。手臂和手的阻抗将使用能够施加力扰动的强大机器人操纵器进行研究。虽然刚度和弹性目前是在人工实验室任务的背景下开发的,但我们将在自然任务中研究刚度依赖的行为,如投掷一个球或在洞中插入一个钉子。现有的闭环系统识别技术将通过非线性时变技术进行扩展,以识别到达和抓取任务中的行为。通过机器学习技术获得抓握力调制和手部肌肉活动相关性,然后转移到机器人系统中。 Finally, optimization techniques gleaned and validated on the detailed biophysical model will be transferred to the variable impedance actuation of the novel biomorphic robot.
-
-
-
-
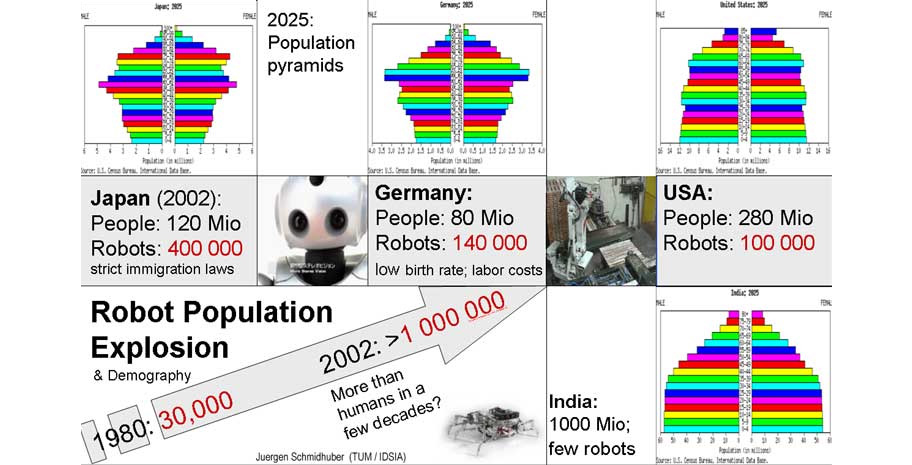
机器人数量爆炸
- 几十年来,施米德休伯教授的演讲都以上面这样的幻灯片为特色。
根据《自然》千禧年特刊的说法,20世纪最有影响力的发明是引发并维持了人口爆炸的发明:哈伯-博斯过程。如果没有它,数十亿人将不复存在。
目前我们正经历着机器人数量的大爆炸。在少数几个停止了人类活动的国家,这种现象最为明显。看看上面日本和德国怪异的人口金字塔(2025年的预测):年轻人很少;很多老人。最终,所有国家的人口统计数据都将相似。
那么谁来做所有的工作呢?当然是机器人。1980年,只有3万个机器人;到2002年,已经有100万辆,其中几乎一半在日本,三分之一在欧洲,尤其是在世界第二大市场德国。
机器人数量的激增最终可能会超过人类,一旦认知机器人不再需要硬连接,而是自己学习。这就是慕尼黑工业大学认知机器人实验室正在研究的课题。
-
-
-
有弹性、自我建模的机器人
- 2004年,机器人世界杯世界冠军亚历山大Gloye-Förster(目前在IDSIA)和他的团队使用连续自建模制造了第一台弹性机器。他们的机器人可以自主地从某些类型的意外伤害中恢复,通过从驱动-感觉关系中推导出的自适应自我模型,用于产生向前运动。参考资料是Gloye的博士学位
以下是Gloye等人2005年文章中的一些相关摘录:“在前一节中应用于机器人的技术不够精确,现在可以应用于解决电机损坏的问题。[…我们的机器人有四个全向轮,当一个电机损坏时,机器人有足够的冗余来继续全向驱动,但机器人上的PID控制器试图控制四个电机。我们当然可以在机器人中使用不同的PID控制器,当电机故障时,我们可以从四轮控制器切换到三轮控制器。然而,如果电机只是部分故障(它开始提供更少的功率,例如,如果电机变得非常热),有一种方法来适应由高级控制发送的命令是可取的。此外,机器人的电子设备可能是一个我们不想要或无法修改的黑盒子。在我们的实验中,我们拿了一个有四个马达的机器人,并断开了其中一个马达的连接。视觉系统跟踪机器人一段时间,并学习预测其对命令的响应函数,如上所述。然后,我们成功地将在线校正应用于受损机器人。可以看出[…]] the driving behavior of the damaged robot is similar to that of a fault-free robot. The robot is somewhat slower, but it can drive accurately again. As this simple experiment shows, it is then feasible to make these types of corrections during RoboCup games. If a motor completely fails, or loses power, the high-level control can let the robot drive for some time, relearn its driving behavior, and apply the online correction. The result is a robot that heals after a few seconds because the coach (the central computer) knows which commands to send ..."
-
-
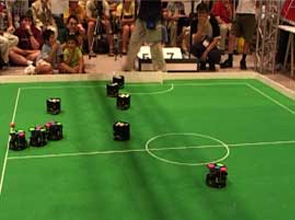
- 2004年决赛的场景。
-

- Gloye-Förster的FU-Fighters之一,在2004年的快速联赛中赢得了机器人世界杯(在快速联赛中,拥有操纵杆的人类对手没有机会)。该机器持续使用人工神经网络来模拟其四轮全向驱动的当前特性。
-
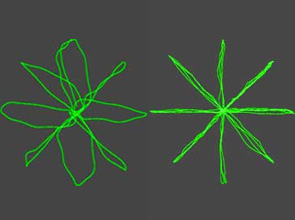
- 左:一台损坏的机器人无法再执行精确的星形驾驶模式。
正确的:与J. Schmidhuber的一篇论文的精神相一致,这个机器人可以快速调整其运动命令和感官输入之间关系的神经模型,并成功地利用它来规划和优化其驾驶轨迹
慕尼黑工业大学实验室
- 使命:制造会学习的机器人。
工具:循环网络,贝叶斯方法,强化学习,进化,最优搜索,等等。
理论:最优通用学习器,通用贝叶斯归纳,Kolmogorov复杂度,Gödel机器。
我们正经历着机器人数量的大爆炸。1980年,只有3万个机器人;到2002年,这个数字已经达到了100万台,其中几乎一半在日本,三分之一在欧洲,尤其是在世界第二大机器人市场德国。
但几乎所有的机器人都是预装的;它们不能像人类一样从经验中学习。少数适应的动物通常只是对当前的感官输入做出反应,而没有进一步利用过去的相关事件。在一般的未知环境中,是否存在学习非反应性行为的最佳方法?我们最近的理论见解证实了答案是肯定的。我们的生物学上可行的方法使用具有内部状态的自适应循环神经网络在现实的、部分可观察的环境中控制自主机器人。
根据《自然》千禧年特刊的说法,20世纪最有影响力的发明是引发并维持了人口爆炸的发明:哈伯-博斯过程。如果没有它,数十亿人将不复存在。
机器人数量的激增在少数几个国家最为明显,这些国家的人类数量已经停止增长,一旦认知机器人不再需要硬连接,而是可以自主学习,机器人数量的增长最终可能会超过人类。
-
-
为什么来TUM?
- 它是自动化和机器人领域的领导者,拥有许多独特而昂贵的机器人,与慕尼黑的宝马和西门子等行业领导者有着密切的联系。14位诺贝尔奖得主(最近的一位是2005年的)与慕尼黑有关,其中4位与慕尼黑工业大学有关。FOCUS调查(2004年9月20日)将慕尼黑工业大学排在德国大学之首,正好在慕尼黑大学之前。2006年10月13日,慕尼黑工业大学和LMU被“卓越计划”评选为德国三所“精英大学”中的两所,该计划将在未来5年内获得19亿欧元的资助。这是所有德国频道黄金时段的新闻。
-
为什么来慕尼黑?
- 它是世界上最宜居的地方之一(根据这项调查,它在世界上人口超过100万的城市中排名第二,仅次于维也纳),并一直被评为德国最具吸引力的城市。大量的文化和乐趣,10万名学生,世界上最大的节日(啤酒节),世界上最古老和最大的技术博物馆,风景优美的巴伐利亚环境,有湖泊、河流、山丘、草地、自行车道、城堡和啤酒花园,靠近主要的滑雪场等。Schmidhuber见过这个世界,他声称没有比慕尼黑和阿尔卑斯山之间的前高山地带更美丽的地方了。(不过他有偏见——他出生在慕尼黑。)
-
为什么来德国?
- 为什么来德国?这是科学家和发明家的好地方,拥有定义当今世界的基本突破的悠久传统,包括西方书籍印刷,计算器,二进制算术和微积分,手表和其他小机器,高斯数学,基于内燃机和汽车的第二次工业革命,第一个实用的发电机和电力运动,疾病的细菌理论,现代研究型大学,广义相对论,量子物理学,人口爆炸,晶体管,计算机,控制重型飞行,直升机,喷气式飞机,巡航导弹,铀裂变,x射线,以及无数其他的东西。
统计机器人
![]() 统计机器人将统计学和概率论(以前已广泛应用于计算机视觉)的知名技术应用于机器人问题。典型的方法有卡尔曼滤波、EM、贝叶斯网络、粒子滤波等。机器人对当前状态的信念是可能状态的概率密度函数;信念会根据新的感官输入和行动效果的先验概率模型不断更新。
统计机器人将统计学和概率论(以前已广泛应用于计算机视觉)的知名技术应用于机器人问题。典型的方法有卡尔曼滤波、EM、贝叶斯网络、粒子滤波等。机器人对当前状态的信念是可能状态的概率密度函数;信念会根据新的感官输入和行动效果的先验概率模型不断更新。
例如,机器人汽车先驱恩斯特·迪克曼斯(Ernst Dickmanns)(80年代和90年代)使用卡尔曼滤波器来处理自动驾驶汽车的不确定传感器读数。
自1990年左右以来,“概率机器人”领域的大部分工作都集中在机器人定位和地图构建上,这是由Durrant-Whyte团队(Kalman滤波器/同步定位和地图构建SLAM)以及Smith等人的开创性工作引发的。
最终的概率方法
参考文献是关于定位的(在较老但非常相似的视觉方法中,等效的目标是对象跟踪)。然而,我们的长期目标是建造能够在未知环境中学习复杂动作序列来解决给定任务的机器人(本地化只是其中的一部分)。
目前,越来越多的机器学习研究人员意识到,至少在我们暂时忽略计算时间的情况下,有一种通用的、贝叶斯的、理论上最优的方法可以做到这一点。它基于可计算概率分布的索罗门诺夫通用混合M。如果世界对机器人行动的反应的概率确实是可计算的(每个人都假设),那么机器人可以使用M来预测它未来的感官输入和奖励,而不是真实但未知的分布。根据Hutter最近的定理(当时在Schmidhuber的SNF补助金20-61847上),机器人确实可以通过选择那些使m预测奖励最大化的动作序列来实现最佳行为。这可能被称为机器人领域不可战胜的终极统计方法——它证明了可能性的局限性。-
Cotesys
- CoTeSys代表有限公司gnitiveTechnicalSys比如自动驾驶汽车、人形机器人和机器人工厂。我们的CoTeSys研究课题包括:
1.DLR人造手的人造好奇心
2.AM 180cm双足行走动物的行为进化
3.自适应移动机器人和机器人汽车的视觉注意、无监督学习和序列学习
4.人类与学习型机器人互动的安全
CoTeSys结合了TUM, LMU, UniBW, DLR, MPI在神经科学,自然科学,工程学,计算机科学和人文科学方面的专业知识。这是2006年全国范围内激烈竞争中少数几个被接受的提案之一。
慕尼黑大学。根据《焦点》和《明镜》杂志最近的调查,CoTeSys的合作伙伴TUM和LMU在德国大学中排名第一。14位诺贝尔奖得主(最近的一位是2005年的MPI)与慕尼黑有关。2006年10月13日,TUM和LMU被德国“卓越计划”评为三所“精英大学”中的两所,该计划由19亿欧元资助,为期5年。这是所有德国频道黄金时段的新闻。
慕尼黑(München)是世界上最宜居的城市之一(根据最近的调查,慕尼黑在世界人口超过100万的城市中排名第二,仅次于维也纳)。大量的文化和乐趣,10万名学生,世界上最大的节日(啤酒节),世界上最古老和最大的技术博物馆,宝马和西门子总部,风景优美的巴伐利亚环境,有湖泊、河流、山丘、草地、自行车道、城堡和啤酒花园,靠近主要的滑雪场等。许多人声称没有比慕尼黑和阿尔卑斯山之间的前阿尔卑斯山地区更美丽的地区了。
德国是科学家和发明家的好地方,有着悠久的基本突破传统,这些突破定义了当今世界,包括西方的书籍印刷、计算器、微积分和比特、手表等小型机器、高斯数学、基于内燃机和汽车、廉价电力和现代化学的第二次工业革命、疾病的细菌理论、现代研究型大学、广义相对论、量子物理学、人口爆炸、晶体管,计算机、控制重型飞行、直升机、喷气式飞机、铀裂变、导弹、x射线,以及无数其他的东西。在20世纪的大部分时间里,德国是获得诺贝尔奖最多的国家(1901-1956;如果我们只考虑获奖者的出生国家,那么直到1965年;直到1975年,如果我们只考虑科学的话)。中国仍是世界上最大的出口国。中国还是仅次于日本的世界第二大机器人制造商和用户,也是首批机器人汽车的诞生地。许多德国球队在机器人世界杯上成为世界冠军,这是最引人注目的机器人比赛。
-
-
- CoTeSys结合了TUM, LMU, UniBW, DLR, MPI在神经科学,自然科学,工程学,计算机科学和人文科学方面的专业知识。这是2006年全国范围内激烈竞争中少数几个被接受的提案之一。
-

- 自我意识认知技术系统见光
-

- CoTeSys自动驾驶汽车。早在20世纪80年代,UniBW就制造了世界上第一辆真正的机器人汽车,1995年,它的视觉导向奔驰机器人已经在车流中以高达180公里/小时的速度从慕尼黑开到丹麦,并自动超过其他汽车
-

- CoTeSys认知工厂大纲,旨在评估CoTeSys各个领域的基础和应用研究。
机器人汽车
- Schmidhuber教授对机器人汽车历史的回顾
1980年前的史前史:简单的自动驾驶车辆
1977:日本机械工程实验室的一辆汽车以30公里/小时的速度沿着道路行驶50米
1980年代:传奇人物恩斯特·迪克曼斯(右)和他在慕尼黑联邦国防军大学(UniBW)的团队使用眼视视觉、卡尔曼滤波器等概率方法和并行计算机制造了世界上第一辆真正的机器人汽车
1987 - 1995:近10亿美元用于泛欧普罗米修斯项目,有史以来最大的机器人汽车项目(与UniBW和许多其他公司合作)
1990年代:索普公司(CMU);神经网络学会驾驶(Pomerleau)
1994:Dickmanns @ UniBW的基于视觉的自主VaMP机器人在巴黎的交通中行驶,同时跟踪多达12辆其他汽车
1995:“横穿美国”(CMU)。但油门和刹车需要人工控制
1995:UniBW慕尼黑的快速奔驰机器人在高速公路上自动行驶了1000英里——在交通中——没有GPS!
2005:DARPA“大挑战”(仅限于美国团队):无交通,土路,GPS驱动:由2935个GPS点预定义的路线(每条街道弯道最多4个GPS点)。提前知道障碍类型
2006:欧洲陆地机器人试验(ELROB):自动越野车辆的演示
2007:ELROB和DARPA的新机器人汽车演示和挑战
未来会带来什么?2005年,每一美元的计算机速度大约是迪克曼斯时代的1000倍,而下一个十年将再提高1000倍左右。这种硬件的进步是机器人控制取得进步的主要原因——软件的进步似乎不那么重要,因为模式识别和概率推理的基本算法在过去十年中没有根本改变,除了这里和那里的改进。然而,有些令人惊讶的是,许多领先汽车公司的代表,如宝马和戴姆勒克莱斯勒(戴姆勒克莱斯勒拥有世界上最大的私人研究预算:2005年为67亿美元),对自动驾驶汽车并不太热情。为什么不呢?因为他们觉得完全自动驾驶的汽车并不一定符合他们客户群的自我形象。因此,他们目前的研究主要集中在更温和的主题上,比如驾驶辅助。即使商业自动驾驶汽车没有一个大的市场,自动驾驶汽车仍然可以找到重要的军事应用——比较美国陆军研究实验室(自20世纪90年代中期以来)、通用动力机器人系统和NIST(系统架构由J. Albus和团队完成)的工作。
-













