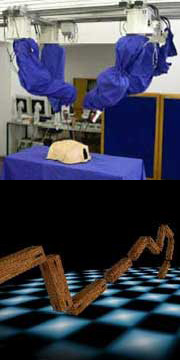
许多工业机器人比人类强壮得多,但也非常不灵活。例如,人类可以把物体扔得更远,接得更优雅,暂时将能量储存在弹性肌腱和肌肉中。然而,这种灵活的执行器需要比传统机器人使用的更复杂的控制算法。STIFF联盟的目标是通过理解和模仿人类中枢神经系统有效使用的可变刚度范式,装备一个高度仿生的机器人手臂系统,具有敏捷性、鲁棒性和多功能性,这些都是人类运动系统的特征。我们研究的一个关键组成部分将是人体手臂和手的精确的解剖学肌肉骨骼模型。该项目将开发新的方法来理解人类手臂如何适应其阻抗,例如通过改变共收缩水平或通过适应反射增益。手臂和手的阻抗将使用能够施加力扰动的强大的机器人操纵器进行研究。虽然刚度和弹性目前是在人工实验室任务的背景下开发的,但我们将在自然任务中研究刚度依赖行为,如扔球或在洞中插入钉子。现有的闭环系统识别技术将被非线性时变技术所扩展,以识别触手和抓取任务中的行为。通过机器学习技术获取握力调制和手部肌肉活动的相关性,然后将其传递给机器人系统。 Finally, optimization techniques gleaned and validated on the detailed biophysical model will be transferred to the variable impedance actuation of the novel biomorphic robot.
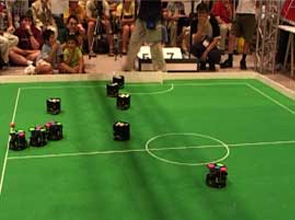
以下是Gloye等人2005年的文章中的一些相关摘录:“在前一节中应用于机器人不够精确的技术现在可以应用于解决电机损坏的问题。[…我们的机器人有四个全向轮,当一个电机损坏时,机器人仍然有足够的冗余来进行全向驱动,但机器人上的PID控制器试图控制四个电机。当然,我们可以在机器人中使用不同的PID控制器,当电机故障时,我们可以从四轮控制器切换到三轮控制器。然而,如果电机只是部分故障(它开始提供更少的功率,例如,如果电机已经变得非常热),就需要有一种方法来适应由高级控制发送的命令。此外,机器人的电子设备可能是一个我们不想或不能修改的黑盒子。在我们的实验中,我们取了一个有四个马达的机器人,并断开其中一个马达的连接。视觉系统跟踪机器人一段时间,并学习预测其对命令的响应函数,如上所述。在此基础上,对受损机器人进行了在线校正,取得了良好的效果。可以看出[…]] the driving behavior of the damaged robot is similar to that of a fault-free robot. The robot is somewhat slower, but it can drive accurately again. As this simple experiment shows, it is then feasible to make these types of corrections during RoboCup games. If a motor completely fails, or loses power, the high-level control can let the robot drive for some time, relearn its driving behavior, and apply the online correction. The result is a robot that heals after a few seconds because the coach (the central computer) knows which commands to send ..."
终极概率方法 参考资料是关于定位(在较早但非常相似的视觉方法中,一个等价的目标是对象跟踪)。然而,我们的长期目标是建造能够在未知环境中学习复杂动作序列来解决给定任务的机器人(本地化只是其中的一部分)。 目前,越来越多的机器学习研究人员开始意识到,至少在我们暂时忽略计算时间的情况下,有一种通用的贝叶斯理论最优方法可以做到这一点。它是基于可计算概率分布的索罗门诺夫通用混合M。如果世界对机器人行为的反应的概率确实是可计算的(这是每个人都假设的),那么机器人就可以使用M来预测其未来的感官输入和奖励,而不是真实但未知的分布。根据Hutter最近的定理(当时在Schmidhuber的SNF grant 20-61847上),机器人确实可以通过选择那些最大化m预测奖励的动作序列来进行最优行为。这可能被称为无人能敌的终极统计方法——它展示了可能性的极限。