类别
机器人
21日xx
会堂图/类别
大厅19
以前的
...米兰理工大学
德克萨斯大学奥斯汀分校
ECOVACS……
下一个
以前的
下一个
导航:
EXPO21XX
>
机器人21 xx
>
娱乐机器人
德克萨斯大学奥斯汀分校
德克萨斯大学奥斯汀分校
概述
业务概况
详细联系方式
网站
发送电子邮件
分享:
提供配置文件
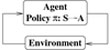
我是德克萨斯大学奥斯汀分校计算机科学系人工智能实验室学习代理研究小组(LARG)的创始人和主任。
我在人工智能方面的主要研究兴趣是了解我们如何才能最好地创建完整的智能代理。我认为适应、交互和体现是这类代理的基本能力。因此,我的研究主要集中在机器学习、多智能体系统和机器人技术。对我来说,最令人兴奋的研究课题是那些受到现实问题挑战的启发。我相信,成功的研究既包括精确、新颖的算法,也包括完全实现和严格评估的应用程序。
产品组合
研究
我的应用领域包括机器人足球、自主投标代理、自主车辆、自主计算和社交代理。我的长期研究目标是创建完整的、健壮的、自主的代理,可以学习在广泛的复杂动态环境中与其他智能代理交互。
当前的项目
强化学习
更多信息
实验室的很大一部分研究重点是开发新的强化学习算法,特别关注大规模应用的扩展。
可替换主体系统
更多信息
该实验室的一个主要主题是研究独立自主代理(包括机器人)之间的相互作用,他们是队友,对手,或者两者都不是。我们在这个话题上的一些研究有助于并利用博弈论。
机器人足球
更多信息
在整个实验室中使用的主要应用领域之一是机器人足球,无论是在模拟还是在真实的机器人上。我们赢得了多次机器人世界杯冠军。
贸易代理
更多信息
另一个主要应用领域是自主交易代理,包括供应链管理、广告拍卖和机制设计。我们赢得了多次交易代理比赛。
自主交通管理
更多信息
我们引入了一种新颖、高效的多智能体机制,用于未来的自动驾驶汽车在十字路口导航。
自主驾驶
更多信息
我们有一辆全尺寸的自动驾驶汽车,用来研究现实世界中的自动驾驶。
通过评估强化(TAMER)手动教学智能体
更多信息
TAMER项目旨在创造一种代理,它可以由外行使用积极和消极的反馈信号有效地教授行为(类似于动物训练中的奖惩“塑造”)。
机器人视觉
更多信息
我们开发适合移动机器人实时视觉感知物理世界的算法。
过去的项目
转移学习
更多信息
我们开发了将知识从以前学习的任务转移到类似但不同的新学习任务的算法。我们特别关注强化学习任务。
学习机器人走路
更多信息
我们让Aibo机器人学会了比以前更快的走路速度。
一般游戏玩法
更多信息
我们成功地参加了前几届的一般游戏比赛。
自主计算
更多信息
我们正在为计算机系统应用开发机器学习方法。
社会代理
更多信息
我们在2007年RoboCup@Home比赛中获得第二名。
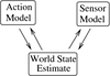
发展机器人技术
更多信息
我们已经开发了机器人自主发现它们自己的传感器和执行器模型的方法。
预测状态表示
更多信息
我们对文献做出了贡献,即完全通过预测其未来感觉作为其可能行为的函数来表示智能体的状态。因此,它不需要明确地对对象进行推理。
分层学习
更多信息
我的博士论文介绍了一个通用的分层机器学习范式,通过这个范式,复杂的任务可以通过几个相互作用的学习层来学习。
规划
更多信息
我读博士期间的第一项研究是经典人工智能规划领域。我们目前的一些研究属于现代计划和调度领域
会堂图/类别
大厅19
以前的
...米兰理工大学
德克萨斯大学奥斯汀分校
ECOVACS……
下一个
以前的
下一个