类别
机器人
21日xx
会堂图/类别
大厅25
以前的
...宾夕法尼亚大学
G3: iCub.org
卡尔斯鲁厄理工学院
下一个
以前的
下一个
导航:
EXPO21XX
>
机器人21 xx
>
H25:人工智能,IT和计算机视觉
> iCub.org
iCub.org
概述
业务概况
详细联系方式
网站
发送电子邮件
分享:
视频
加载播放器…
提供配置文件
iCub是一款人形机器人
意大利技术学院
作为欧盟项目RobotCub的一部分,随后被全球20多个实验室采用。
由意大利技术学院的机器人、大脑和认知科学系负责
由欧盟委员会认知系统和机器人项目资助
产品组合
iCub
iCub是一款人形机器人
意大利技术学院
作为欧盟项目RobotCub的一部分,随后被全球20多个实验室采用。它有53个马达,可以移动头部、手臂和手、腰部和腿。它可以看到和听到,它有本体感觉(身体结构)和运动(使用加速计和陀螺仪)。我们正在努力改进这一点,以赋予iCub触觉,并评估它对环境施加的力。
认知类人实验室的科学家在机器人和神经科学研究的前沿工作,在类人形状的机器人中实现认知模型。这群不同种类的人的目标是了解大脑的功能,实现机器人控制器,可以从他们的错误中学习和适应。
这些活动包括硬件(我们称之为“身体部件”)和软件的建造,这些软件将在未来的某一天使机器具有与人类相当的智能。我们称这种技术为“心智软件”。在车身方面,我们开发了iCub,一个人形机器人,形状像一个4岁的孩子。与此同时,我们正在解决下一代机器人技术的发展,这些技术基于用于传感和处理的柔软和适应性材料。在思维方面,实验室参与了类人机器人认知技能的实现;也就是说,为机器人提供视觉、听觉和触觉感知,以及凝视、触摸和操纵物体的能力。
更多信息
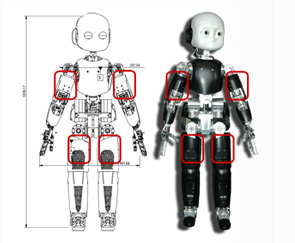
iCub 6轴力/扭矩传感器
iCub在上臂和腿部安装了4个6轴力/扭矩传感器。它们被设计为与ATI Mini-45传感器兼容(尺寸上)。电子器件已经小型化,以适应直接提供数字(CAN)输出的传感器。
CFW-2、PC104卡10口CAN总线
这是一个多端口PC104+卡,拥有10个CAN总线端口(由两个微控制器管理),两个火线端口和音频前置放大器。一个大缓冲区(2Mbyte)可用于存储CAN消息,还提供了PCI总线上的DMA接口。
iCUb控制器
iCub控制器是基于飞思卡尔56F807芯片的小型微控制器板。每个卡都可以通过can总线连接到主机CPU (PC104卡)。它们有两种不同的类型,控制4个有刷直流电动机(每个0.5A)或2个无刷直流电动机(48V, 6A连续,20A峰值)。拉丝版本由一个小电源补充;无刷版本由两部分组成(一个用于逻辑,另一个用于放大器)。
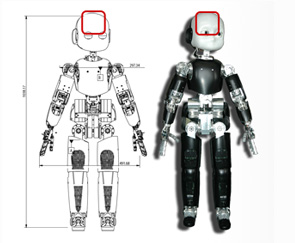
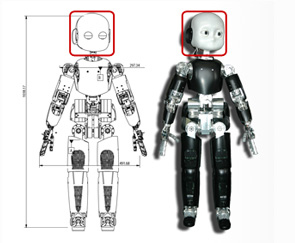
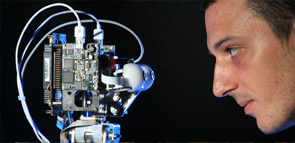
iCub头1.1
iCub头部有6个自由度,配有两个摄像头(Dragonfly2)、两个麦克风(带有特殊的翼状结构)、陀螺仪和加速度计(Mtx)。它还安装了一个PC104双核机器,有足够的端口来控制整个机器人,读取数据并通过Gbit/s以太网端口发送数据。
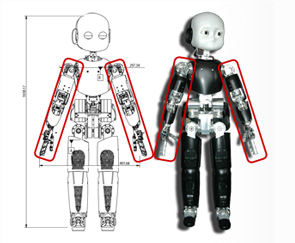
伸出手臂和手
iCub的手臂和手是拟人化的,共同运动16个自由度。手臂(包括手腕)7针,手9针。8个自由度分配给拇指、食指和中指,因此具有相当大的灵活性。这只手可以在指尖和手掌上集成108个触觉传感器。
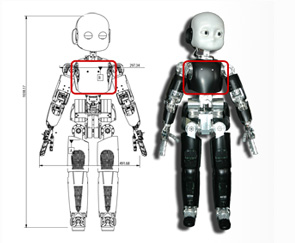
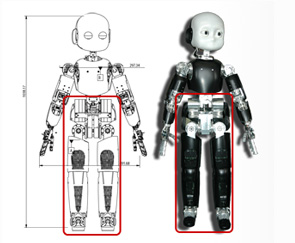
iCub的腿和躯干
iCub的腿和躯干共有15个自由度。它们主要是为四肢爬行而设计的,但测试表明,两足行走是可能的。力/扭矩传感器安装在每条腿的上部。
通过力控制的发展,iCub平台正在注入新的生命。这项新技能可以使机器人与人类教师进行安全温和的互动。一段短视频展示了一名实验人员使用这项新功能来教一个全新的iCub做简单的动作。
由于Poeticon EU项目,iCub的抓取技能最近得到了提高。通过使用Poeticon团队开发的口语工具,将抓取等简单动作结合起来。在这个例子中,iCub将谷物倒入杯子中。
iCub的新视觉技能。使用光流的iCub独立运动跟踪。看看我们如何轻松地跟踪独立于iCub移动的物体或人。
iCub在2010年访问热那亚和IIT期间会见了意大利总统。这里总统在收到iCub手中最新的IIT传单后询问机器人。照片中还有乔治·梅塔、朱利奥·桑迪尼和罗伯特·辛戈拉尼。
2010年4月,iCub作为意大利代表团的一部分在汉诺威参加国际博览会和展览。这是它与德国总理默克尔的互动,同时展示了它的运动协调能力和软件可靠性。iCub连续运行了整整三天,吸引了成千上万好奇的游客
洛伦佐,图片中的那个家伙,在进行操作实验之前正在检查新的iCub。iCub在指尖和手掌上安装了电容皮肤系统,可以测量接触情况并实施安全抓取策略。
按摩皮肤和指尖
iCub可以安装两种形式的电容皮肤系统:指尖皮肤和通用身体皮肤。
表皮是基于一个模块化的三角形结构和最小的外部布线。
每个紫杉树可以在50Hz(8位)采样,并通过can总线连接到CFW-PC104卡。
iKart
这是一个完整的iCub移动底座,安装了六个瑞典轮子,一个高性能的i7-CPU,它运动无线连接和高性能锂离子电池。iCub可以站在底座上,使用标准接口控制底座。
iCub 2.0
iCub 2.0是我们实验性的(正在进行中的)新iCub。iCub在扭矩测量(关节水平)、张力传感器(用于肌腱)、全身皮肤、指尖、新头部、所有无刷电机上的额外高分辨率编码器、力学和布线方面的许多小改进以及新的足部设计(用于双足运动)方面进行了升级。
iCub头2.0
新的头部(暂时称为2.0)处于设计和原型的高级阶段。´颈部已重新设计,以获得更大的扭矩,眼睛将安装零间隙谐波驱动齿轮。进一步的小修改已经实施,特别是支持精确的相机校准。
项目
RobotCub
更多信息
RobotCub的目标是通过实现一个3.5岁儿童大小的人形机器人iCub来研究认知能力。这是一个完全开源的硬件项目,独一无二!这个项目启动了iCub的硬件和软件。
的经验
更多信息
经验将证明,通过使用结构自举来生成新知识,最先进的制定系统可以显著地扩展。这一过程建立在探索性知识获取的基础上,随后通过基于经验的泛化进行验证。
EFAA
更多信息
实验功能安卓助手(EFAA)项目将通过推动单一类人社交能力的发展,以及它们在一致架构中的集成,为社会智能类人的发展做出贡献。
MACSi
更多信息
MACSi项目是一个基于iCub人形机器人的发展性机器人项目。从2010年到2012年,该项目由ANR Blanc资助。
达尔文
更多信息
达尔文项目旨在开发一种“会行动、会学习、会推理”的组装机器人,最终将能够从其组成部分组装和拆卸复杂物体
ITALK
更多信息
ITALK项目旨在开发能够通过个人和社会学习获得复杂行为、认知和语言技能的人工具身代理。这将通过iCub人形机器人的实验来实现。
Poeticon
更多信息
POETICON是一个探索日常生活的诗学的项目,即在日常人类互动中感觉运动表征和自然语言的综合。这与人工智能领域的一个老问题有关,即意义是如何产生的。
克里斯
更多信息
CHRIS项目(协作人机交互系统)从运动和认知的角度解决了安全人机交互(HRI)的基本问题。
RobotDoc
更多信息
RobotDoC学院是一个发展认知机器人跨学科培训的多国博士培训网络。RobotDoc研究员将通过开源人形机器人iCub的实验获得实践经验。
Roboskin
更多信息
RoboSKIN将开发并展示一系列基于机器人皮肤从机器人身体大面积提供的触觉反馈的新型机器人功能。到目前为止,由于缺乏触觉传感技术,对这些主题的原则性研究受到了限制。
Amarsi
更多信息
与机器人相比,人类和动物的运动技能仍然令人震惊。AMARSi的目标是在机器人运动技能上实现质的飞跃,以实现生物丰富性。
IM-CLeVeR
更多信息
IM-CLeVeR旨在开发一种新的方法来设计机器人控制器,可以通过基于内在动机的自主开发来累积学习新的有效技能,并重用这些技能来完成多个、复杂的和外部分配的任务。
eMorph
更多信息
eMorph项目的目标是设计具有非均匀形态的异步视觉传感器,使用模拟VLSI神经形态电路,并开发支持机器视觉的数据驱动异步计算范式。
罗西
更多信息
从认知是具象的假设出发,ROSSI项目解决了智能体(例如人类和机器人)之间交流的可能性如何受到感觉运动能力差异的影响的问题。
会堂图/类别
大厅25
以前的
...宾夕法尼亚大学
G3: iCub.org
卡尔斯鲁厄理工学院
下一个
以前的
下一个