类别
机器人
21日xx
会堂图/类别
大厅22
以前的
...夸祖鲁-纳塔尔大学
康奈尔大学
奥克兰理工大学…
下一个
以前的
下一个
导航:
EXPO21XX
>
机器人21 xx
>
移动机器人研究
康奈尔大学
康奈尔大学
概述
业务概况
详细联系方式
网站
发送电子邮件
分享:
视频
加载播放器…
提供配置文件
我们的目标是在机器人的基本问题上进行突破性的研究,以使自主移动机械手能够执行这些和其他具有挑战性的任务。我们的重点不仅是令人兴奋的新研究,而且还将开发强大的、广泛适用的新工具和软件,供其他研究人员部署和使用。
产品组合
项目
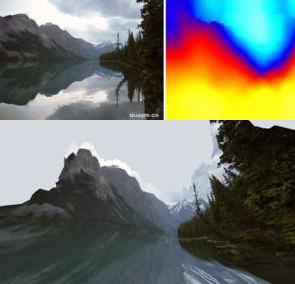
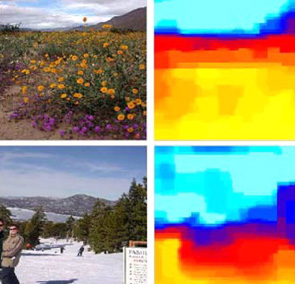
Make3D:单幅图像深度感知
更多信息
学习预测深度和推断三维模型的算法,只给一张静止图像。应用包括从用户照片中创建沉浸式3d体验,提高立体视觉性能,从少量图像中创建大型模型,机器人导航等。成千上万的用户已经将他们的单张照片转换成3D模型。
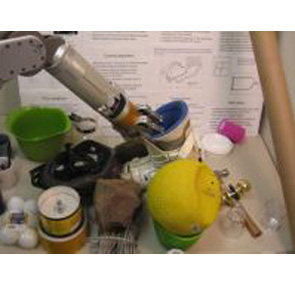
个人机器人:学习机器人操作
更多信息
学习算法来预测机器人的抓取,即使是机器人从未见过的物体类型。适用于从洗碗机中取出物品,清理杂乱的桌子,打开新门等任务。
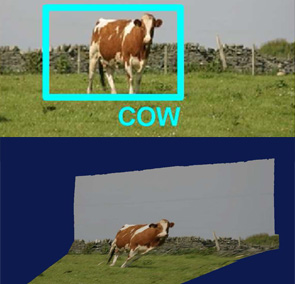
整体场景理解:将模型作为黑盒组合
更多信息
整体场景理解需要同时解决几个任务,包括目标检测、场景分类、有意义区域标记和三维重建。我们开发了一种学习方法,将这些单独的子任务结合起来,以提高每个子任务的表现。
视觉导航:微型飞行器
更多信息
使用单眼深度感知和强化学习技术在非结构化环境中高速驾驶小型rc车。也可以使用单个机载摄像头自主飞行室内直升机/四旋翼机。
楼梯:打开新的门
更多信息
对于实际部署在家庭和办公室环境中的机器人来说,它们应该能够操纵环境以进入新的空间。我们提出了学习算法来做到这一点,从而使我们的机器人成为第一个能够通过打开门和电梯在新建筑的任何地方导航的机器人,即使是那些它从未见过的门和电梯。
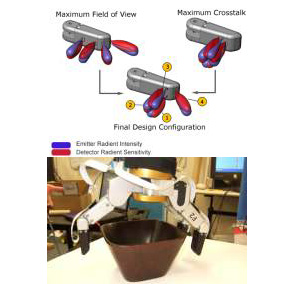
楼梯:光学接近传感器
更多信息
我们提出了一种新型的光学接近传感器来提高抓地力。这些传感器安装在指尖上,允许预触摸姿势估计,因此允许在线抓取调整到初始抓取点,而不需要过早接触物体或重新抓取策略。
Zunavision
更多信息
我们开发了通过添加纹理来自动修改视频的算法。我们的算法执行稳健的跟踪、遮挡推断和颜色校正,使纹理看起来是原始场景的一部分。
视觉导航:高速避障
更多信息
使用单眼深度感知和强化学习技术在非结构化环境中高速驾驶小型rc车。
Make3D扩展:从稀疏视图大比例模型
更多信息
创建大型环境的3d模型,只提供少量(可能)不重叠的图像。该技术集成了运动结构(SFM)技术和Make3D的单图像深度感知算法。
利用单目线索改善立体视觉
更多信息
立体视觉基本上受到两个摄像机之间基线距离的限制。也就是说,当考虑的距离较大时,深度估计往往不准确。我们相信单目视觉线索提供的深度信息在很大程度上是正交的,因此是互补的。我们提出了一种将单眼线索与立体(三角测量)线索结合起来的方法,以获得比单独使用任何一种线索都更准确的深度估计。
会堂图/类别
大厅22
以前的
...夸祖鲁-纳塔尔大学
康奈尔大学
奥克兰理工大学…
下一个
以前的
下一个