- 提供配置文件
- 布鲁塞尔自由大学机械工程系多体力学小组于1990年开始了其刚柔机械系统计算机辅助分析的研究活动。它的主要研究集中在运动学和动力学模拟,开发和使用新的执行器,以及机械系统的控制。
产品组合
准智能拥抱机器人
- Probo是一款智能拥抱机器人,是专门研究儿童认知人机交互(cHRI)的研究平台。机器人Probo被设计成一个社交界面,在使用类似人类的社交提示和交流方式的同时,提供自然的互动。该机器人有一个完全驱动的头部,有20个自由度,能够显示面部表情。一个显著的特点是可移动的行李箱和柔软而令人拥抱的外套。用户友好的机器人用户界面(RUI)使操作员能够控制机器人。
-
-
-
露西——两足行走机器人
- 这个项目的目标是创造一个轻量级的两足动物,它能够以动态稳定的方式行走。这种两足动物的外形是拟人化的,重点是由两条关节腿组成的下部行走部分。该机器人(包括所有部件)重约30公斤,高150厘米。由于该机器人是一维关节,每个关节都由一对对抗性的折叠气动人工肌肉提供动力,因此只能在矢状面内移动。这些肌肉是轻量级的气动执行器,在低压下工作,可以直接耦合,无需复杂的齿轮传动机构。这些执行器的适应性被动行为将在行走算法中得到利用。
设计中的一个关键思想是模块化,这导致了每个结构元素以及机械、电子和底层控制软件部分几乎相同的配置。关节设计本身允许容易改变驱动器的特性,这创造了一个灵活的实验平台。
-
-
-
气动人工肌肉
- 气动人工肌肉本质上是一种薄膜,充气时会向径向扩张,向轴向收缩,同时沿纵轴产生高拉力。不同的设计已经开发出来。最著名的是所谓的McKibben肌肉(例如影子机器人公司的空气肌肉)。肌肉中有一根橡胶管,当充气时橡胶管会膨胀,而周围的网则会传递张力。由于网和橡胶管之间的干摩擦造成的迟滞现象,使这种装置的控制相当复杂。典型的这种类型的肌肉是在任何动作发生之前的压力阈值水平。新设计的主要目标是避免摩擦和迟滞,从而使控制更容易,同时避免阈值。这是通过将薄膜排列成径向布局的褶皱来实现的,在充气时可以展开而不受径向应力的影响。膜的刚性纵向纤维传递张力。
-
-
-
柔软的手臂
- 在装配中,重复的手工处理重负荷是常见的,是下背部疾病的常见原因。这可能对生活质量产生重大影响,并产生严重的经济成本。操纵器是为避免这些问题而设计的机器人系统。他们帮助人们执行繁重的任务。
大多数商业上可用的机械手使用配重,这限制了他们的使用处理特定质量的负载。其他的是电动或液压驱动。这通常使它们沉重、复杂和昂贵。
PPAM执行器的使用使我们能够解决这些问题,并开发出一种结合了人体工程学、操作安全、低成本、低重量和易于操作的操作臂。
我们的研究目标是开发一种概念验证型机械手,该机械手将与操作员直接接触使用,不需要昂贵的力或扭矩传感器,也不需要通过控制元件(如操纵杆)进行用户交互。我们正在努力实现这样一个系统:当操作员想要移动附着在机械手上的负载时,他/她开始移动它,就像没有机械手一样。通过测量肌肉压力表压力,系统可以估计操作人员施加的力,并帮助操作人员完成所需的负载运动。理想情况下,移动30公斤的货物感觉就像移动3公斤的货物。操作者和负载之间的直接交互(没有中间控制工具)允许非常精确的定位。
-
-
-
AMPfoot
- 穿着经典的假肢走路是非常困难和消耗能量的,就像休·赫尔所说的“就像穿着合拢的滑雪靴走路”。基于我们的柔性执行器和双足行走机器人(如双足Lucy)技术,我们开发了AMP脚。这是一个被动的假肢(所以在走路的步态中没有能量供应),但能量被储存和释放,试图尽可能地模仿正常的脚踝。
-
-
MACCEPA:机械可调柔度和可控平衡位置驱动器
- 除了开发和实现折叠气动人工肌肉,我们的研究小组开发了第二执行机构的适应性顺应。MACCEPA(机械可调柔度和可控平衡位置致动器)是一种简单易行的旋转致动器,柔度可以从平衡位置单独控制。这些参数都是由位置控制伺服电机设定的。此外,扭矩是柔度和平衡位置与实际位置之间的角度的线性函数。因此,该驱动器可以被视为一个完全适应扭转弹簧,其中一个电机设置扭转弹簧的刚度,另一个设置平衡位置。由于这个驱动器有一个弹簧,它可以储存和释放能量。这使得该驱动器非常适合动态行走和人机界面。
-
-
-
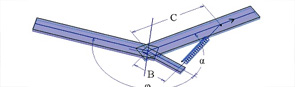
- 可以看到,有3个物体绕着一个旋转轴旋转。为了将这个概念形象化,可以将图1中的左侧身体看作一条腿,右侧身体看作一条腿,它是穿过膝关节的旋转轴。在这个旋转轴周围,一个杠杆臂在旋转,如图3所示为一个较小的体。弹簧连接在杠杆臂上的固定点和绕右本体上的固定点运行的电缆之间,连接到预紧机构。




















