- 提供个人资料
- T’n’T is the reigning German champion in robot soccer challenge 2vs2, A and B. They are also soccer world champion in 2vs2 Version B competition and the most successful German "RoboCup Junior" soccer-team in the age-group of 15 to 20.
- 在欧洲连续80场比赛中不败
- 8倍德国冠军
- 和2倍世界冠军
产品介绍
团队
- T'NOT团队由Jonas和Benno Timmermann兄弟组成,他们参加了Weißenhorn的Nikolaus-Kopernikus-Gymnasium。自2002年以来,乔纳斯(Jonas)一直从事机器人技术。他的弟弟在一年后加入了他的行列,并于2005年一起组建了足球队。兄弟会本身计划,构建和编程所有机器人。他们通过互联网收集大部分知识,并从该行业获得了一些零件和材料。在2008年,他们成功地构建了九种不同的机器人模型,这主要是由于年轻的野心,密集的工作和慷慨的赞助商所致。
-
德国公开2010年在马格德堡
- T'NOT团队 - Benno(17,左)和Jonas Timmermann(19,右)
-

新加坡玛丽娜湾的副世界冠军2010
-

新鲜的德国冠军2008,230:38和109:14进球
Robocup Junior
- Robocup Junior是一项国际比赛,高中生使用他们的自我设计和编程的机器人来参加足球,救援和舞蹈的三个学科。
竞争分为两个年龄段;15岁以下和15至20岁。要参加每年在汉诺威贸易博览会上举行的德国锦标赛,一支球队必须通过参加三个当地冠军之一来获得资格。自从T'NOT Not是2003年世界锦标赛的首次参加以来,这项比赛就在意大利,葡萄牙,日本,德国,美国,中国,奥地利和新加坡举行。
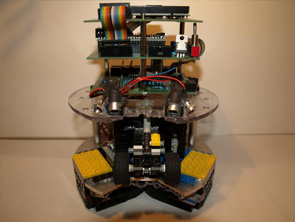
不机器人 - 原型2010
-
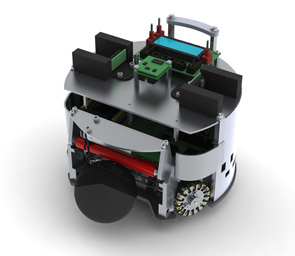
Robo 2010
-
- 控制器:Blackfin处理器模块由Arrow的EPC + STM32协处理器
- 底盘:铝
- 驱动:3x 12W无刷电动机
3x自设计的全轴
- 电源:1x 14,8V Lipo电池
1x 7,4 V Lipo电池
- 球检测:16倍照片模块
7x光晶体管
- 墙和对手
- 识别:3倍超声测距仪
- 方向:1x指南针传感器
1倍小鼠传感器
1x陀螺
- 踢:1倍电磁阀
- 运球器:1x 6W电动机
-
-
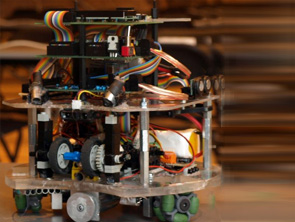
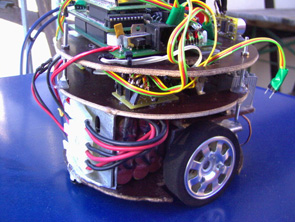
不机器人-2009
-

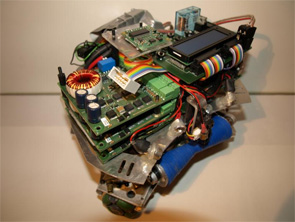
Robo 2009
-
- 控制器:Blackfin处理器模块由Arrow的EPC
- 底盘:铝
- 驱动器:4x 6W电动机
4倍OmniWheel
- 电源:1x 14,8V Lipo电池
2x 7,4 V Lipo电池
- 球检测:70倍光接触器
- 墙和对手
- 识别:4倍超声测距仪
- 方向:1x指南针传感器
1倍小鼠传感器
- 踢:1倍电磁阀
- 运球器:1x 6W电动机
2x 0.5W电动机
-
-
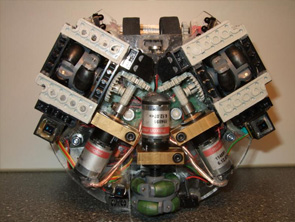
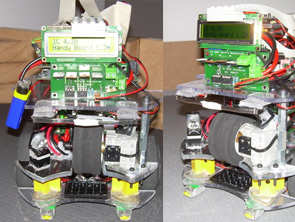
T'NOT机器人 - 2008年 - 中国世界库州苏州
-
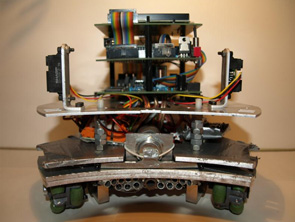
苏州守卫者“ 2vs2” 2008
-
- 控制器:AVR ATMEGA 2560
- 底盘:铝
- 驾驶:
3x 12W电动机
3倍OmniWheel
- 电源:
1x 14,8V Lipo电池
1x 7,4 V Lipo电池
- 球识别:58x照片晶体管
- 墙壁和对手的认可:
3倍红外空间传感器
- 方向:
1x指南针传感器
1X CNY70地板传感器
- 踢:1倍电磁阀(起重磁铁)
- 运球者:
1x 6W电动机
1倍双光盘
-
守门员Suzhou 2008
-
- 控制器:AVR ATMEGA 2560
- 底盘:铝
- 驾驶:
3x 6W电动机
3倍OmniWheel
- 电源:
1x 14,8V Lipo电池
1x 7,4 V Lipo电池
- 球识别:43X照片晶体管
- 墙壁和对手的认可:
3倍红外空间传感器
- 方向:
1x Ompasssensor
1X CNY70地板传感器
- 踢:1倍电磁阀(起重磁铁)
-

守卫苏州“ 1VS1” 2008
-
- 控制器:AVR ATMEGA 2560
- 底盘:铝
- 驾驶:
3x 6W电动机
3倍OmniWheel
- 电源:
1x 14,8V Lipo电池
1x 7,4 V Lipo电池
- 球识别:58x照片晶体管
- 墙壁和对手的认可:
3倍红外空间传感器
- 方向:
1x指南针传感器
1X CNY70地板传感器
- 踢:1倍电磁阀(起重磁铁)
- 运球者:
1x 6W电动机
1倍双光盘
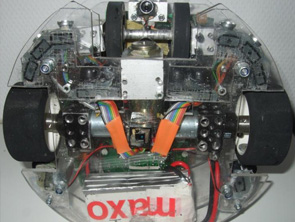
T'NOT机器人-2008-德国公开汉诺威
-

Fielder Hannover 2008
-
- 控制器:AVR ATMEGA 2560
- 底盘:铝制 /有机玻璃
- 驾驶:
3x 6W电动机
3倍OmniWheel
- 电源:
1x 14,8V Lipo电池
1x 7,4 V Lipo电池
- 球识别:45x照片晶体管
- 墙壁和对手的认可:
3倍红外空间传感器
- 方向:
1x指南针传感器
1X CNY70地板传感器
- 踢:1倍电磁阀(起重磁铁)
- 运球者:
1x 6W电动机
2x古米拉德(乐高)
-

守门员汉诺威2008
-
- 控制器:AVR ATTMEGA 2560
- 底盘:铝制 /有机玻璃
- 驾驶:
3x 6W电动机
3倍OmniWheel
- 电源:
1x 14,8V Lipo电池
1x 7,4 V Lipo电池
- 球识别:52x照片晶体管
- 墙壁和对手的认可:
3倍红外空间传感器
- 方向:
1x指南针传感器
1X CNY70地板传感器
-
1VS1 Hannover 2008
-
- 控制器:AVR ATMEGA 2560
- 底盘:铝制 /有机玻璃 /乐高
- 驾驶:
3x 6W电动机
3倍OmniWheel
- 电源:
1x 14,8V Lipo电池
1x 7,4 V Lipo电池
- 球识别:33X照片晶体管
- 墙壁和对手的认可:
2倍红外空间传感器
- 方向:
1个指南针传感器
3X CNY70地板传感器
- 运球者:
1倍乐高运动
2x古米拉德(乐高)
T'NOT机器人-2008-南德冠军FürstenfeldBruck
-
FielderFürstenfeldBruck2008
-
- 控制器:AVR ATMEGA 2560
- 底盘:有机玻璃 /乐高
- 驾驶:
3x 6W电动机
3倍OmniWheel
- 电源:
1x 14,8V Lipo电池
1x 7,4 V Lipo电池
- 球识别:41x照片晶体管
- 墙壁和对手的认可:
2x超声测距仪
- 方向:
1x指南针传感器
2x CNY70地板传感器
- 踢:1倍电磁阀(起重磁铁)
- 运球者:
1x 6W电动机
2x古米拉德(乐高)
- 橡胶轮
-

守门员FürstenfeldBruck2008
-
- 控制器:AVR ATMEGA 2560
- 底盘:有机玻璃
- 驾驶:
3x 6W电动机
3倍OmniWheel
- 电源:
1x 14,8V Lipo电池
1x 7,4 V Lipo电池
- 球识别:52x照片晶体管
- 墙壁和对手的认可:
3倍超声测距仪
- 方向:
1x指南针传感器
1X CNY70地板传感器
-
1VS1FürstenfeldBruck2008
-
- 控制器:AVR ATMEGA2560
- 底盘:丙烯酸玻璃 /乐高
- 驾驶:
3x 6W电动机
3倍OmniWheel
- 电源:
1x 14,8V Lipo电池
1x 7,4 V Lipo电池
- 球识别:33倍光晶体管
- 墙壁和对手的认可:
2x超声测距仪
- 方向:
1x指南针传感器
3X CNY70地板传感器
- 运球者:
1x 6W电动机
2x橡胶轮(乐高)
不机器人-2007
-
2007年 - 美国亚特兰大世界杯
-
2007年 - 德国公开汉诺威
-

2007年-Süddeutsche冠军Vöhringen
-
2005年 - 日本世界杯大阪
-

2005年 - 德国开放式Paderborn
























