Videos
Loading the player ...
- Offer Profile
- T’n’T is the reigning German champion in robot soccer challenge 2vs2, A and B. They are also soccer world champion in 2vs2 Version B competition and the most successful German "RoboCup Junior" soccer-team in the age-group of 15 to 20.
- undefeated in 80 consecutive games in Europe
- 8x German champions
- and 2x World champions
Product Portfolio
The Team
- T’团队made up of the brothers Jonas and Benno Timmermann, who attend the Nikolaus-Kopernikus-Gymnasium in Weißenhorn. Jonas has been engaged with robotics since 2002. His younger brother joined him a year later and in 2005, came together to form the soccer Team T’n’T. The brothers plan, construct and program all their robots themselves. They gather most of their knowledge through the internet and have some parts and materials sponsored from the industry. In 2008, they successfully constructed nine different robot models, an effort that was mainly due to youthful ambition, intensive work and their generous sponsors.
-
German Open 2010 in Magdeburg
- T’n’T Team – Benno (17, left) and Jonas Timmermann (19, right)
-

The vice world champion 2010 in Marina Bay, Singapore
-

The fresh German champions 2008 with 230:38 and 109:14 scored goals
RoboCup Junior
- RoboCup Junior is an international competition in which high school students use their self-designed and programmed robots to compete in the three disciplines of football, rescue and dance.
The competition is divided in two age groups; the under 15 and the 15 to 20 years old. To take part in the German championship, which takes place each year at the Hannover Trade Fair, a team has to qualify by taking part in one of the three local championships. Since T'n'T's first participation in the 2003 world championships, the tournaments have taken place in Italy, Portugal, Japan, Germany, USA, China, Austria and Singapore.
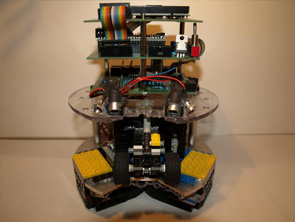
T'N'T Robots - Prototype 2010
-
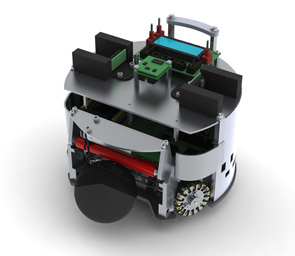
Robo 2010
-
- Controller: Blackfin Processor Module by Arrow's EPC + STM32 Coprocessor
- Chassis: Aluminium
- Drive: 3x 12W brushless Motor
3x self-designed Omniwheel
- Power Supply: 1x 14,8V LiPo Battery
1x 7,4 V LiPo Battery
- 球检测:16 x照片模块
7x Phototransistor
- Wall & Opponent
- Recognition: 3x Ultrasonic Rangefinder
- Orientation: 1x Compass Sensor
1x Mouse Sensor
1x Gyro
- Kick: 1x Solenoid
- Dribbler: 1x 6W Motor
-
-
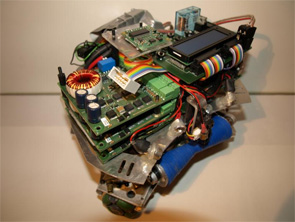
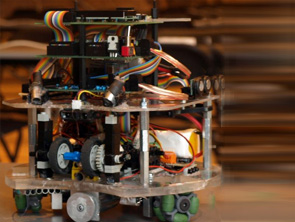
T'N'T Robots - 2009
-

Robo 2009
-
- Controller: Blackfin Processor Module by Arrow's EPC
- Chassis: Aluminium
- Drive: 4x 6W Motor
4x Omniwheel
- Power Supply: 1x 14,8V LiPo Battery
2x 7,4 V LiPo Battery
- Ball Detection: 70x Photobtransistor
- Wall & Opponent
- Recognition: 4x Ultrasonic Rangefinder
- Orientation: 1x Compass Sensor
1x Mouse Sensor
- Kick: 1x Solenoid
- Dribbler: 1x 6W Motor
2x 0.5W Motor
-
-
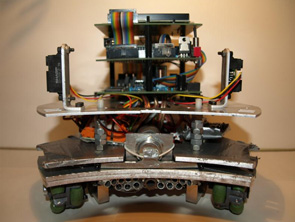
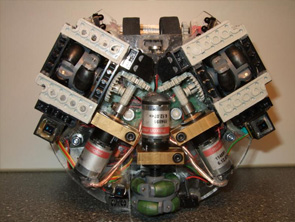
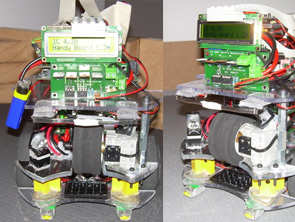
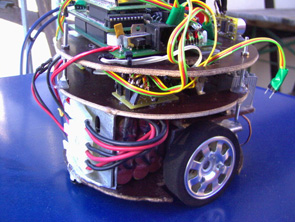
T'N'T Robots - 2008 - Worldcup Suzhou, China
-
fielder Suzhou "2vs2" 2008
-
- Controller: AVR ATmega 2560
- Chassis: Aluminium
- Drive:
3x 12W motor
3x Omniwheel
- Electric supply:
1x 14,8V LiPo battery
1x 7,4 V LiPo battery
- Ball recognition: 58x photo transistor
- Wall & opponent recognition:
3x infrared space-sensor
- Orientation:
1x compass sensor
1x CNY70 floor sensors
- Kick: 1x Solenoid (lifting magnet)
- Dribbler:
1x 6W motor
1x double disc
-
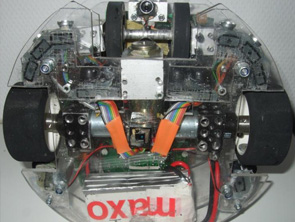
goalkeeper Suzhou 2008
-
- Controller: AVR ATmega 2560
- Chassis: Aluminium
- Drive:
3x 6W motor
3x Omniwheel
- Electric supply:
1x 14,8V LiPo battery
1x 7,4 V LiPo battery
- Ball recognition: 43x photo transistor
- Wall & opponent recognition:
3x infrared space-sensor
- Orientation:
1x ompasssensor
1x CNY70 floor sensors
- Kick: 1x Solenoid (lifting magnet)
-

fielder Suzhou "1vs1" 2008
-
- Controller: AVR ATmega 2560
- Chassis: Aluminium
- Drive:
3x 6W motor
3x Omniwheel
- Electric supply:
1x 14,8V LiPo battery
1x 7,4 V LiPo battery
- Ball recognition: 58x photo transistor
- Wall & opponent recognition:
3x infrared space-sensor
- Orientation:
1x compass sensor
1x CNY70 floor sensors
- Kick: 1x Solenoid (lifting magnet)
- Dribbler:
1x 6W motor
1x double disc
T'N'T Robots - 2008 - German Open Hannover
-

fielder Hannover 2008
-
- Controller: AVR ATmega 2560
- Chassis: Aluminium / plexiglas
- Drive:
3x 6W motor
3x Omniwheel
- Electric supply:
1x 14,8V LiPo battery
1x 7,4 V LiPo battery
- Ball recognition: 45x photo transistor
- Wall & opponent recognition:
3x infrared space-sensor
- Orientation:
1x compass sensor
1x CNY70 floor sensors
- Kick: 1x Solenoid (lifting magnet)
- Dribbler:
1x 6W motor
2x Gummirad (lego)
-

goalkeeper Hannover 2008
-
- Controller: AVR ATtmega 2560
- Chassis: Aluminium / plexiglas
- Drive:
3x 6W motor
3x Omniwheel
- Electric supply:
1x 14,8V LiPo battery
1x 7,4 V LiPo battery
- Ball recognition: 52x photo transistor
- Wall & opponent recognition:
3x infrared space-sensor
- Orientation:
1x compass sensor
1x CNY70 floor sensor
-
1vs1 Hannover 2008
-
- Controller: AVR ATmega 2560
- Chassis: Aluminium / plexiglas / lego
- Drive:
3x 6W motor
3x Omniwheel
- Electric supply:
1x 14,8V LiPo battery
1x 7,4 V LiPo battery
- Ball recognition: 33x photo transistor
- Wall & opponent recognition:
2x infrared space-sensor
- Orientation:
1 compass sensor
3x CNY70 floor sensor
- Dribbler:
1x lego-motor
2x Gummirad (lego)
T'N'T Robots - 2008 - South Germany Championship Fürstenfeldbruck
-
fielder Fürstenfeldbruck 2008
-
- Controller: AVR ATmega 2560
- Chassis: plexiglas / lego
- Drive:
3x 6W motor
3x Omniwheel
- Electric supply:
1x 14,8V LiPo battery
1x 7,4 V LiPo battery
- Ball recognition: 41x photo transistor
- Wall & opponent recognition:
2x ultrasonic rangefinder
- Orientation:
1x compass sensor
2x CNY70 floor sensor
- Kick: 1x Solenoid (lifting magnet)
- Dribbler:
1x 6W motor
2x Gummirad (lego)
- Rubber wheel
-

goalkeeper Fürstenfeldbruck 2008
-
- Controller: AVR ATmega 2560
- Chassis: plexiglas
- Drive:
3x 6W motor
3x Omniwheel
- Electric supply:
1x 14,8V LiPo battery
1x 7,4 V LiPo battery
- Ball recognition: 52x photo transistor
- Wall & opponent recognition:
3x ultrasonic rangefinder
- Orientation:
1x compass sensor
1x CNY70 floor sensor
-
1vs1 Fürstenfeldbruck 2008
-
- Controller: AVR ATmega2560
- Chassis: Acrylic Glass / Lego
- Drive:
3x 6W Motor
3x Omniwheel
- Electric Supply:
1x 14,8V LiPo Battery
1x 7,4 V LiPo Battery
- Ball Recognition: 33x Phototransistor
- Wall & Opponent Recognition:
2x Ultrasonic Rangefinder
- Orientation:
1x Compass Sensor
3x CNY70 Floor Sensor
- Dribbler:
1x 6W Motor
2x Rubber Wheel (Lego)
T'N'T Robots - 2007
-
2007 - Worldcup Atlanta, USA
-
2007 - German Open Hannover
-

2007 - Süddeutsche Championship Vöhringen
-
2005 - Worldcup Osaka, Japan
-

2005 - German Open Paderborn
























