类别
机器人
21日xx
大厅地图/类别
大厅25
以前的
...卡西诺大学
Q5:立命馆大学
移动机器人实验室……
下一个
以前的
下一个
导航:
EXPO21XX
>
机器人21 xx
>
H25: AI, IT和计算机视觉
>立命馆大学
立命馆大学
概述
业务概况
详细联系方式
网站
发送电子邮件
分享:
视频
载入播放器…
提供配置文件
我们正在研究基于力学的机器智能及其相关技术,包括传感器和执行器。
产品组合
平井实验室:综合机器智能实验室
当前的项目
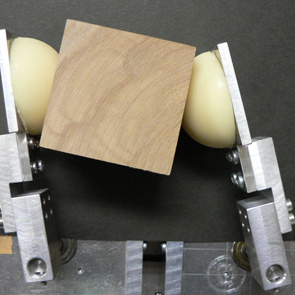
Soft-fingered操纵
本研究的目的是利用软指机械手进行灵巧而稳定的物体操作。通过实时视觉系统测量被操作对象的位置和触觉传感器测量的抓取力反馈到手部运动,实现稳定的抓取和操作。我们对软指尖的建模和抓取和操作的控制规律很感兴趣。
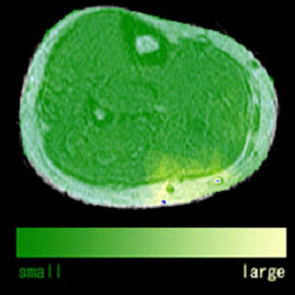
非均匀生物对象建模
本研究将建立一种基于非均匀生物物体内部测量的变形模型建立方法。我们将利用CT和MRI获取物体内部的变形场,估计非均匀变形参数。
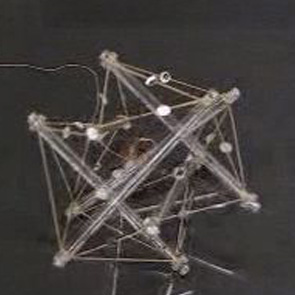
张拉整体结构的机器人
在本研究中,我们将研究一个通过张拉整体结构的变形在地形上移动的机器人。主体由刚性构件组成,刚性构件由张力构件连接。张拉整体结构的变形产生了在地形上的运动。
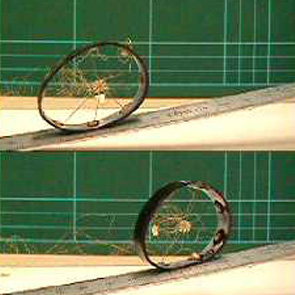
爬行和跳跃的软机器人
在本研究中,我们将开发一种能够通过滚动和跳跃实现粗糙地形运动的机器人。由可变形软体和柔性执行机构组成的机器人可以通过其可变形体的变形在地面上滚动和跳跃。
带对象操作
本研究的目的是实现对扁平电缆、柔性电路板等带对象的操纵。通过对物体变形的目视观察估计变形特性,确定机械手搬运物体的轨迹。
CMOS + FPGA的愿景
我们开发了一个CMOS+FPGA视觉系统,以执行快速(1000 fps)和高分辨率(1000 x1000像素)的视觉反馈。CMOS图像传感器实现了连续图像的快速捕获,FPGA实现了视觉算法,实现了特征的实时计算,以提供视觉反馈。
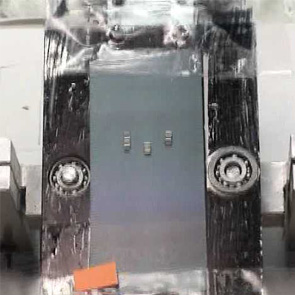
微观部分喂养
本课题的目标是实现芯片电容器、电阻等微电子部件的振动驱动。采用非对称表面(锯齿面)与对称振动(正弦振动)相结合的方法来实现微型零件的单向运动。我们正在分析进给过程中微观零件的动力学。
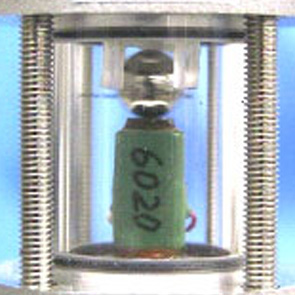
微型气动阀
研制了一种可嵌入气动肌肉的微型气动比例阀,可控制0.5MPa的气流驱动气动肌肉。
布操纵
这个项目旨在开发一个机械系统,执行展开的衣服。展开包括抓取、展开和放置操作。我们用捏滑运动来分析动态膨胀。
软接口
本研究的目标是包括软接口在内的控制机制。通过对软物体运动变形的同时控制和对松耦合关节的控制,揭示了软界面机构控制中力学与控制之间的相互作用。
可变形线性对象的操作
在这项研究中,我们将探索可变形的线性物体的操作,如电缆、电线和管子。在线性对象建模的基础上,建立控制策略,实现对线性对象的操作。
带对象建模
本研究的目的是建立平面电缆、柔性线路板等可变形带体的建模方法。提出了一种基于微分几何的皮带物体弯曲和扭转的建模方法。
集成传感器和智能实验室。
集成传感器与智能实验室成立于2009年,旨在通过集成感觉、智能和运动系统,为自主和自适应机器人系统开发智能传感系统。我们的研究课题包括智能传感器、传感器融合、神经形态系统和基于视觉的机器人控制。
自主和自适应机器人的智能视觉系统
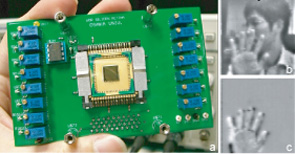
神经形态视觉芯片
硅视网膜是一种智能视觉传感器,通过使用模拟脊椎动物视网膜神经元电路结构的并行模拟电路,可以执行实时图像预处理。为了增强对光照条件变化的鲁棒性,我们设计并制作了一种基于框架的、宽动态范围的硅视网膜,具有对数照度-电压转换特性。该芯片实现了足够宽的动态范围,可以在室内和室外环境中感知物体。
模拟立体视觉神经机制的双目机器人视觉
我们开发了一个模拟初级视觉皮层(V1)神经回路视差计算的双目视觉系统。该系统由两组硅视网膜和简单的电池芯片组成,它们对应于双目视觉和现场可编程门阵列(FPGA)电路。这种排列模仿了大脑视觉系统的等级结构。该系统结合了模拟vlsi的并行计算和模拟计算,以及硬连线数字电路的像素化计算,能够以紧凑的硬件结构和低功耗实时高效地计算双目视差。
基于视觉的小型移动机器人导航
设计了一种低功耗、结构紧凑的双目机器人视觉系统。该系统由两个硅视网膜和FPGA电路组成,可实时计算深度图和速度图。我们开发的计算算法的灵感来自初级视觉皮层神经元网络的层次结构。我们将该系统应用于由石井实验室开发的移动机器人的视觉导航中。在九州工业大学,在真实的环境中。
合作
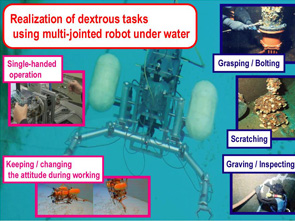
多关节双臂水下机器人的控制/操作
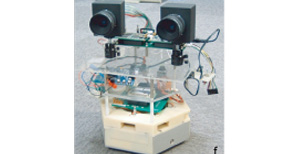
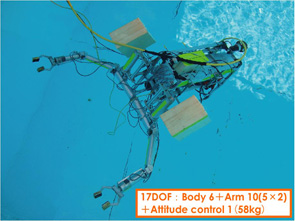
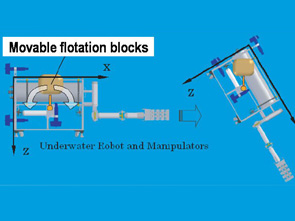
在本次研究中,我们开发了一个真人大小的水下机器人(长度;700毫米直径;200毫米),两臂(总长度;600毫米),而不是专业潜水员(图1)。一个串联臂有5自由度,包括2自由度的扭转/抓握手。我们开发的单手操作者可以在该系统中同时驱动手臂和身体(图2)。手臂的质量占整个身体重量的20%,因此在工作过程中机器人的姿态可能会发生变化。可移动的浮块保持/改变姿态以支持工作,移动浮力中心相对于重心(图2、图3)。通过现场作业,我们已经验证了该机器人可以代替人类完成几项水下任务(见电影)。
图1:原型(可可)
图2:概念
图3:移动活动浮块改变姿态原理
大厅地图/类别
大厅25
以前的
...卡西诺大学
Q5:立命馆大学
移动机器人实验室……
下一个
以前的
下一个