- 提供配置文件
- 仿生毫微系统实验室的目标是利用动物操作、运动、传感、驱动、力学、动力学和控制策略的特点,从根本上提高毫微机器人的能力。实验室的研究范围从机械原理的基本理解到新型制造技术,再到自主微型机器人的系统集成。该实验室与生物学家密切合作,开发可以在工程系统和自然系统上测试的功能模型。该实验室目前的研究集中在使用纳米结构粘合剂的全地形爬行和生物仿生飞行。
产品组合
走动的机器人
- 为什么腿机器人?
与轮式系统相比,腿式系统具有一些关键的性能优势。在一个有腿的系统中,脚不是连续地与地面接触,而车轮需要一个连续的路径来支撑。这使得有腿的生物和机器人能够穿越具有挑战性的地形。一些有腿的系统(生物的和人造的)可以克服超过系统臀部高度三倍的障碍,而车轮被限制在不高于一个半径的障碍。最后,也许是最有趣的是自然界中腿类生物的动态行为。许多有腿的动物表现出动态的、自我稳定的行为。也就是说,系统的被动力学特性被调整到自然地拒绝干扰,否则可能导致系统的不稳定行为。
-
最近的结果
-
1STAR: 1舵机导向机器人
- (2014年6月)
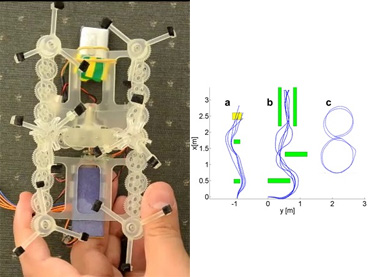
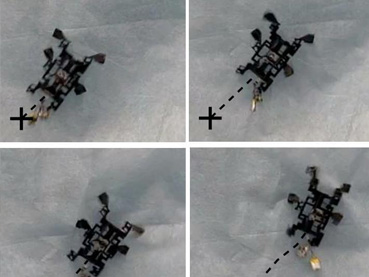
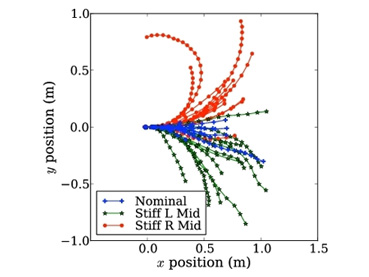
针对柔性六足机器人的平面内运动(向前、向后、顺时针和逆时针旋转)问题,提出了一种新颖的动态步态控制方法。该步态利用三脚交替站位之间的顺应差异,通过控制机器人的加速度来产生旋转。《Zarrouk and Fearing》(IEEE ICRA 2014年6月)
-
横摇振荡调制转弯
- (2014年6月)
提出了一种新的腿部机器人动态转向模式,该模式采用锁相步态来激发高度和滚转耦合振荡。一种改进的机器人增加了横摇摆动,旋转速度为206度/秒,速度为0.4米/秒。霍尔丹和担心
-
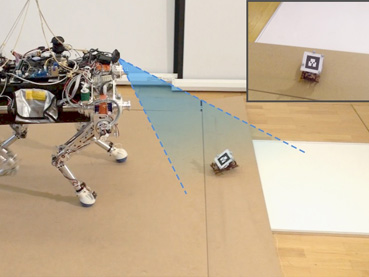
基于纠察机器人的光滑地形检测
- (2014年6月)
StarlETH (ASL, ETH Zurich)和UCB VelociRoACH采用关节定位方法对滑滑地形进行检测,准确率达92%。Haldane等人(IEEE ICRA 2014年6月)
-
空气动力转向SailRoACH
- “SailRoACH”利用尾部的空气动力来转弯,实现半径1.2米的转弯,同时以每秒1.6米的速度奔跑。对于快速运行的小型机器人来说,比例法则适合这种转向模式。Kohut等人(IEEE IROS 2013年11月)
-
一个扩展调谐自主机器人
- (2013年2月)
该机器人在横平面上有一个可变的腿伸展角,以适应其刚度、高度和腿与表面的接触角。当倾斜角度较低时,接触角和法向接触力大大减小,速度在光滑表面上增加,以所有速度稳定运行,最高可达5.2米/秒。Zarrouk et al。ICRA 2013。
-
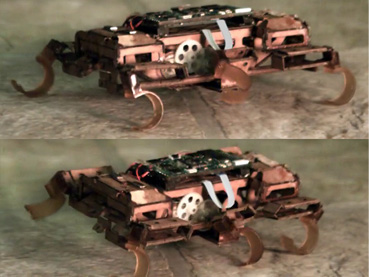
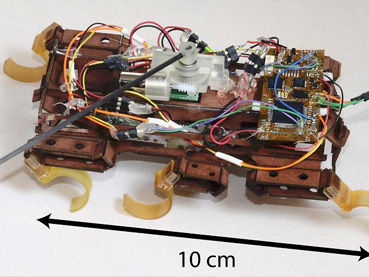
动物启发的六足微型机器人的设计与气动稳定
- (2013年1月)
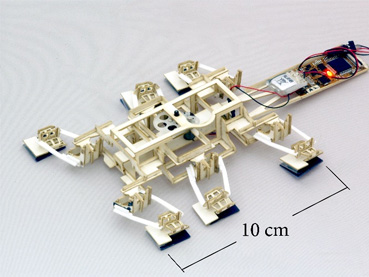
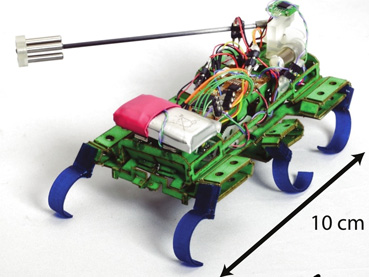
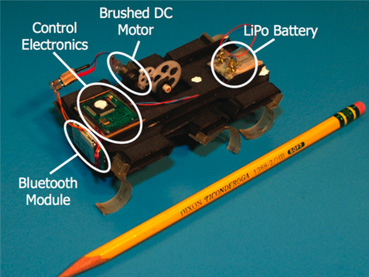
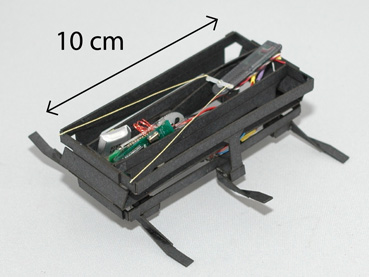
VelociRoACH是一个长10厘米、重30克的六足微型机器人,能够以每秒2.7米的速度奔跑,这使它成为迄今为止最快的有腿机器人。动态相似技术与气动阻尼相结合可提供高速稳定性。D. Haldane等。2013年举行IEEE“国际机器人与自动化会议”。
-
光滑表面的动态爬坡
- (2012年10月)
近垂直表面的动态攀爬会产生反作用力,需要更大的法向粘附力来防止下落。在30度斜坡上的动态爬坡以12hz的爬坡速度成功,但在70度斜坡上只有4hz。Birkmeyer, Gillies, fear IROS 2012年10月
-
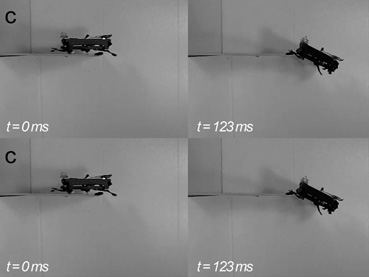
快速反转:奔跑的动物和机器人
- (2012年6月)
蟑螂和壁虎在奔跑时可以像钟摆一样在壁架下摆动来逃脱。DASH机器人有一个特殊的脚装置,也可以以类似的方式摆动。Mongeau等,2012年6月
-
6腿TAYLRoACH
- 这款100毫米大小的六足机器人TAYLRoACH可以在奔跑时快速旋转90度。科胡特et al。CLAWAR,巴尔的摩,2012年7月。
-
带尾OctoRoACH
- 这款100毫米大小的OctoRoACH机器人可以使用差动驱动以每秒100度的速度旋转,也可以使用峰值转速为每秒400度的动态尾巴。牵引等。ICRA 2012
-
冲刺+翅膀:翅膀辅助跑
- (2011年10月)
DASH+Wings是一种小型六足翼机器人,使用拍打翅膀来增加其地面移动能力。机翼增加爬坡和稳定性,但不能提供足够的飞行推力。翼助跑机器人及其对鸟类飞行进化的启示。生物灵感和Bioimetics
-

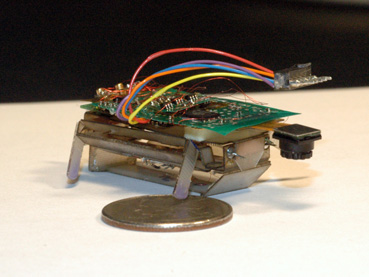
OctoRoACH:双重驱动MilliRobot
- (2011年9月)
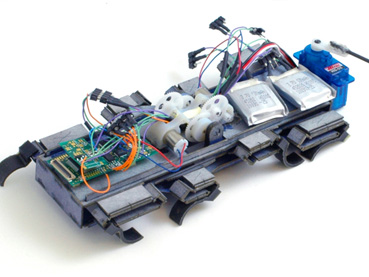
OctoRoACH机器人的质量小于30克,包括带有陀螺仪、加速度计、无线电和相机的ImageProc CPU,能够在粗糙的表面上运动。由A. Pullin设计的机器人。牵引等。ICRA 2012
-
攀爬松散的垂直布
- (2011年9月)
“碰撞”机器人的质量为15克,使用简单的被动爪机构和面内腿传动系统,能够以每秒15厘米的速度在松散的布料表面爬行。(博克梅厄et al。——2011年)
-
MEDIC微型机器人具有身体支撑的攀爬功能
- (2010年12月)
medicc机器人的质量为5.5克,使用静态SMA驱动器可以在1毫米内定位。该机器人包括摄像头和无线。
-
通过调节腿的刚度实现动态转弯
- (2010年9月)
dynaRoACH机器人的质量为24克,能够以每秒14个身长的速度运行。通过改变腿的刚度,机器人可以在5次跨步中完成90度转弯。BioRob 2010
-
roch 2.0和DASH颗粒媒体
- (2010年4月)
与高盛实验室在GeorgiaTech的联合工作,测量颗粒介质的运输成本显示,在每秒6-10个身体长度的情况下,运输成本为5-30 J/kg-m。
-
DASH 16克六足机器人
- (2009年10月)
DASH机器人采用柔顺纤维板作为结构材料,采用单一的主驱动电机,在平面上能够达到每秒15个身长。该结构是有弹性的,并能在10米/秒的终端速度下承受地面冲击。
DASH:一个动态的15克六足机器人,IROS 2009。
-
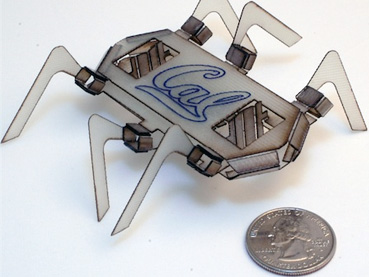
罗奇的机器人
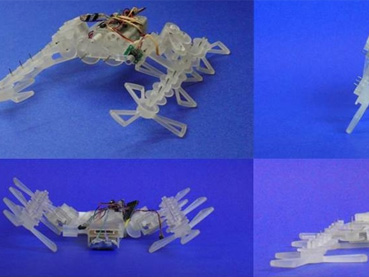
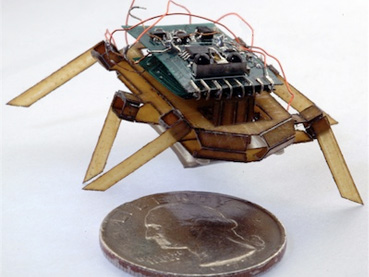
- 在仿生毫希系统实验室,我们结合了我们在制造毫希机器人方面的专业知识和对腿系统的兴趣,制造了我们认为是迄今为止最小的无栓、有腿的机器人——一个2.5克重的有腿机器人,称为机器人自主爬行六足机器人(RoACH)。该机器人采用了智能复合微结构制造工艺和集成形状记忆合金(SMA)线驱动器。所有的电源、控制和通信电子设备都装载在船上,整个机器人由Full River公司生产的20maHr锂聚合物电池供电。
-
一个有腿的微型机器人的模型
- 使用常见的廉价材料,可以在大约1小时内创造出多达60个关节的折叠腿机器人原型。然后,原型机可以用直流电机或其他类型的驱动器(如右图所示的形状记忆合金线)驱动。折叠成型
折叠微型机器人的快速规模原型,ICRA 2008
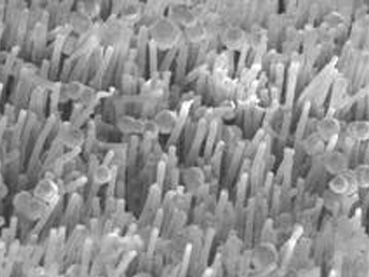
生物灵感合成壁虎粘合剂
- 通过对表面相互作用的机械控制,微细和纳米纤维结构被设计为提供高摩擦和粘附力。
-
新闻
-
低模量微光纤阵列
- (2014年5月)
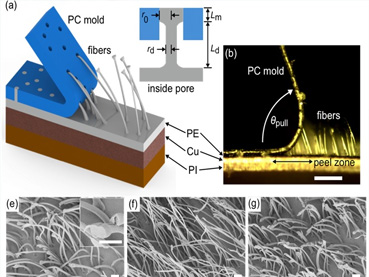
我们通过从低展弦比的微孔聚碳酸酯模板中定向拉伸聚乙烯来生产高展弦比、有角度的聚合物微纤维阵列。这些阵列代表了一种新型的静电传感器和致动器衬底,因为它们具有低刚度(< 24kpa的有效弹性模量)、低泊松比(在低应变下有效为零)和非常低的密度(<1%的固体聚乙烯)的特点。
角度微纤维阵列作为低模量、低泊松比柔性基板,j。微程。24065016,2014。
-
粗糙表面的GSA剪切
- (2014年4月)
建立了表面特征尺寸与胶粘剂末端特征形状之间的关系模型。在振幅远大于纳米尺度特征的正弦曲面上,铲形特征可以使平滑表面的粘附力增加2.5倍,粗糙表面的粘附力增加10倍。
人工合成壁虎阵列在粗糙表面上剪切的仿真研究,王志强。接口,2014年4月。
-
粗糙表面上的壁虎趾
- (2013年10月)
我们测量了壁虎足能获得的最大剪切力,其正弦模式的尺寸与脚趾和片层结构的尺寸相似。我们发现,在振幅和波长接近片层长度和片层间距的表面上,剪切粘附显著下降,在测试范围内失去了95%的剪切粘附。
壁虎趾和板层剪切粘附宏观工程粗糙表面,中国机械工程,2013年10月。
-
硬与软纤颤自洁
- (2013年6月)
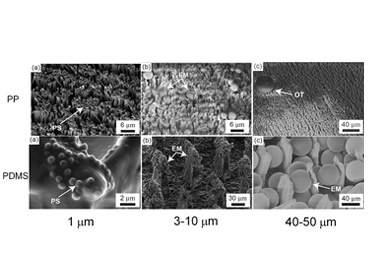
对于一定的颗粒尺寸和纤维直径,硬(聚丙烯)和软(硅橡胶)纤维胶粘剂在被球形颗粒污染后均可恢复粘接能力。纤维、颗粒和基材之间的接触强度分析表明,对于纤维直径较小、损耗函数较小的材料(如硬质热塑性塑料),干式自清洗效果更好。
硬和软纤维结构的干式自洁性能,ACS应用材料和界面,2013年6月(刚刚接受)
-
控制粒子粘附
- (2013年2月)
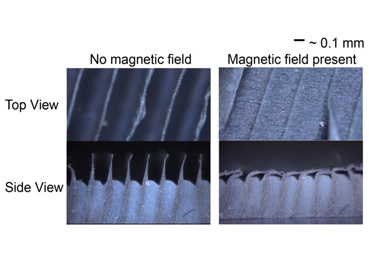
利用磁驱动合成壁虎胶粘剂对玻璃球进行了可控粘附。结果表明,通过外加磁场改变球脊方向可使球的拉拔力提高10倍,有效弹性模量从65 kPa提高到1.5 MPa。
可控粒子黏附的磁致驱动合成壁虎胶,先进功能材料,2013
-
HDPE GSA的湿式清洗
- (2012年10月)
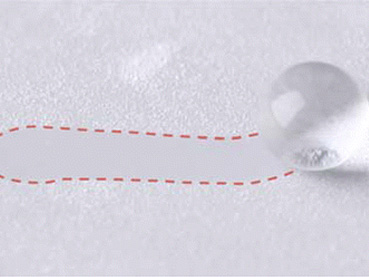
由高密度聚乙烯(HDPE)形成的高宽比超细纤维形成的硬聚合物基GSA,可用水自洁。该超纤维胶黏剂对污垢颗粒具有几乎完全的湿式自清洁效果,恢复了原始超纤维胶黏剂98%的粘附力。
高密度聚乙烯形成的超疏水超纤维胶粘剂的湿式自清洗,朗缪尔,2012
-
GSA胶粘剂材料限制
- (2011年8月)
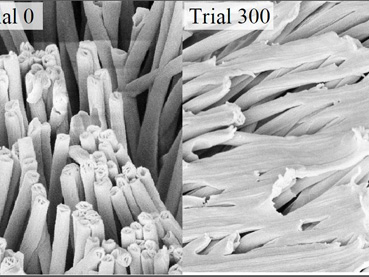
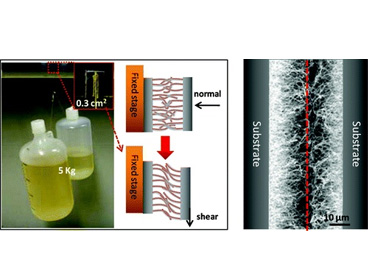
HDPE和PP纤维阵列具有足以使纤维变形的剪切粘附应力(0.3 MPa)。因此纤维材料的强度是一个极限,更大的粘附强度。令人惊讶的是,GSA保持54%的原始应力尽管或显著变形超过10000次循环。
热塑性壁虎合成胶粘剂的剪切粘接强度超过材料极限,朗缪尔,2011
-
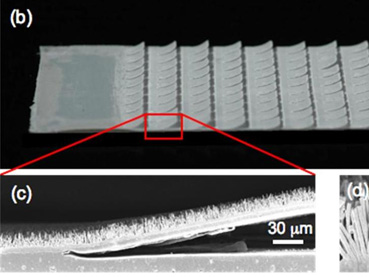
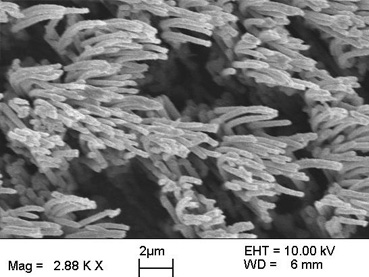
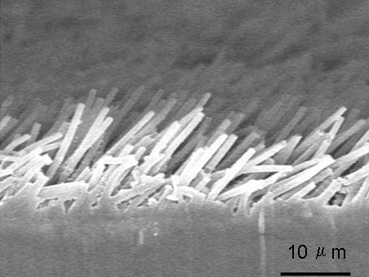
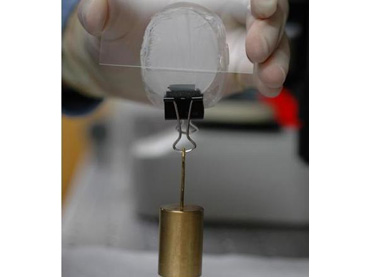
组合层状纳米纤维阵列
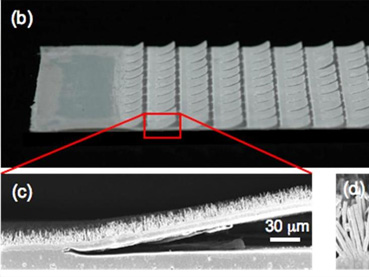
- (2009年10月)
层状结构是高展弦比HDPE纤维阵列的基础支撑面。薄片上的纳米纤维阵列可以与光滑的光栅粘附,其剪切强度是平面纳米纤维阵列的5倍。朗谬尔,2009年10月
-

壁虎汽车轮胎(2008年11月)
- 包裹在汽车模型轮胎上的超细纤维阵列显示出高摩擦力。(注意:到目前为止,轮胎只能在光滑的表面上工作。)
高摩擦从刚性聚合物使用微纤维阵列,物理。启信,2006
-
有角微纤维的定向粘附
- (2008年11月)
斜向聚丙烯超细纤维具有较强的定向粘附效应,沿纤维方向的剪切强度是沿纤维方向的45倍。1平方。厘米。贴片在剪切过程中承受了450克的载荷。壁虎启发的定向粘附微纤维阵列,应用物理快报,2008。
-
自洁壁虎胶
- (2008年9月)
第一种合成壁虎胶,可以像天然壁虎一样在使用过程中自我清洁。被微球污染后,微纤维阵列失去所有的粘附强度。在与干净的玻璃反复接触后,微球脱落,纤维恢复原来30%的粘附。纤维具有非粘性的默认状态,这有助于在接触期间去除颗粒。合成壁虎胶粘剂的接触自清洁,朗缪尔,2008
壁虎黏附项目概述
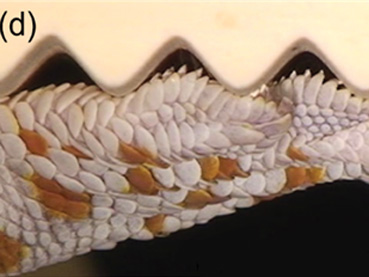
- 壁虎有一种非凡的能力,可以在任何光滑或粗糙、潮湿或干燥、干净或肮脏的表面上以任何方向奔跑。壁虎黏附性能的基础是在壁虎每个脚趾上的数百万微米尺度的刚毛,形成一种自清洁的干黏合剂。每一套的尖端由100到1000个直径仅为100纳米的抹刀组成。我们的跨学科生物学家和工程师团队自1998年以来一直致力于开发自然纳米结构如何在铲形、铲形柄、坐骨柄、坐骨阵列和脚趾力学的层次组合中发挥作用的模型,并开发纳米制造工艺,使大量的头发斑块阵列能够经济地制造出来。
合成壁虎纳米毛发特性
- 利用生物学的见解,我们开发了壁虎毛发粘附的机械模型,然后设计、制造和测试微纤丝和纳米纤丝结构。我们的目标是达到秋鉴定的壁虎胶粘剂系统的七个基准功能特性(MRS Bulletin 2007):
- 各向异性的依恋,
- 拉拔与预紧比高,
- 低剥离力,
- 材料独立性/范德华附着力,
- 自洁,
- anti-self席子,
- 粘贴式默认状态。
较低的剥离力、自洁性和无粘性的默认状态表明聚合物是硬的,而不是通常用于压敏胶粘剂的软聚合物。正如2002年报道的,[Sitti和Fearing 2002]和Autumn等人[2002]我们已经制造了合成刮刀,在100-300 nN范围内显示了类似于天然刮刀的粘附性。这些小块的凸起没有固定柄,在一平方厘米的面积上产生了几毫牛顿量级的粘附力。在2003年,我们制作了高密度的匙形柄阵列[Campolo等人,2003],它在剪切时显示出每平方厘米0.5牛顿的粘附力。厘米。2006年,我们展示了一种0.6微米纤维的新型高摩擦阵列,其抗剪切力为4牛顿/平方英尺。厘米。每平方英尺只有0.8牛顿。厘米。[Majidi等人。 PRL 2006]. In 2007, we showed how the polypropylene fiber arrays can provide shear force without a normal load being present [Schubert et al. JAST 2007]. In 2008, we made easy-attach easy-release hard polymer gecko adhesives which have a non-adhesive default state [Lee et al. JRSI 2008], and can self-clean during contact [Lee and Fearing Langmuir 2008]. The final goal is to build arrays incorporating the necessary geometrical features which have the same adhesion as geckos to rough and smooth surfaces.
壁虎式合成粘附技术的进展
-
组合层状纳米纤维阵列
- (2009年10月)
层状结构是高展弦比HDPE纤维阵列的基础支撑面。薄片上的纳米纤维阵列可以与光滑的光栅粘附,其剪切强度是平面纳米纤维阵列的5倍。朗谬尔,2009年10月
-
混合核壳纳米线连接器
- (2009年4月)
二甲苯涂覆的锗纳米线阵列彼此连接,形成可重复使用的连接器。独特的是,NW化学连接器具有较高的宏观剪切粘接强度(1.6 MPa),与非自相似表面的结合极小,具有各向异性的粘接行为(剪切与正常强度比25),低预压,可重复使用,并在微观和宏观尺度上有效地结合。Nanoletters, 2009年4月
-
减少电阻纳米线接触
- (2008年12月)
镍纳米线可以增加接触面积,降低接触电阻。与接触平板相比,探针与200纳米× 10微米镍纳米线阵列之间的电阻降低了一个数量级。采用镍纳米线阵列降低接触电阻,IEEE Trans。关于compo . and Pack。科技》2008。
-
有角微纤维的定向粘附
- (2008年11月)
斜向聚丙烯超细纤维具有较强的定向粘附效应,沿纤维方向的剪切强度是沿纤维方向的45倍。与垂直纤维不同,倾斜纤维在没有剪切载荷的情况下也表现出正常的粘附。壁虎启发的定向粘附微纤维阵列,应用物理快报,2008。
-
自洁壁虎胶
- (2008年9月)
第一种合成壁虎胶,可以像天然壁虎一样在使用过程中自我清洁。被微球污染后,微纤维阵列失去所有的粘附强度。在与干净的玻璃反复接触后,微球脱落,纤维恢复原来30%的粘附。合成壁虎胶粘剂的接触自清洁,朗缪尔,2008
-
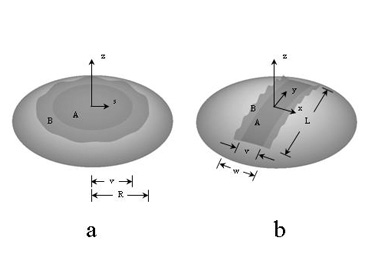
弹性板在球体上的粘附
- (2008年2月)
即使是一层薄膜粘附到不可展开的表面,如球体上,也需要拉伸和弯曲。将接触点分成小片减少膜应变和增加附着力。
粘接弹性板到一个球体,Proc. Royal Soc。一个2008
-
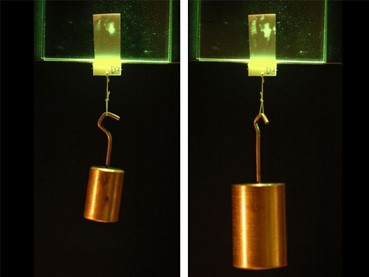
定向壁虎胶粘剂
- (2008年1月)
首先容易附着,容易释放,定向合成壁虎胶粘剂使用硬聚合物微纤维。每平方厘米使用4200万聚丙烯微纤维阵列。补丁可以支持9 N/平方厘米。预紧力仅为0.1N/平方厘米。
刚性聚合物的滑动诱导粘附,界面,2008
-
聚丙烯超细纤维的剪切附着力
- (2007)
剪切附着力0.1 N/平方厘米。采用0.6微米聚丙烯纤维阵列。正常预加载要求小于0.05 N/sq。舒伯特等。Jnl。粘附的科学。和技术,2007]。
-
聚丙烯超细纤维的高摩擦
- (2006)
使用垂直取向聚丙烯微纤维阵列,在不使用软/粘性材料的情况下,演示了高摩擦。在0.8 N /平方。Cm,摩擦系数大于5。
[Majidi等PRL 2006]。版权所有(2006):美国物理学会
高摩擦从刚性聚合物使用微纤维阵列,物理。启信,2006
-
纤维粘附的侧接触模型
- (2005)
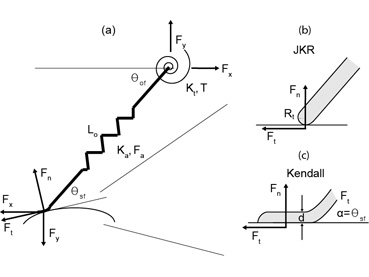
纤维侧接触附着力分析。Majidi, Groff, fear J. appll。Phys 2005]表明,足够长的纤维,如碳纳米管,可以稳定地进行侧接触。这种侧接触可以提供比半球形尖端接触大10-20倍的粘附力。
-
侧面接触结块的验证
- (2004)
纤维密度受到结块的限制——针尖与针尖之间的间隙更大,而两侧的纤维距离更近。正方形晶格被预测有更好的结块阻力。聚酰亚胺纤维(直径0.6微米)具有结块行为。[Majidi, Groff, fear 2004]。
-
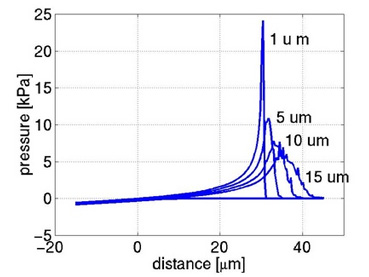
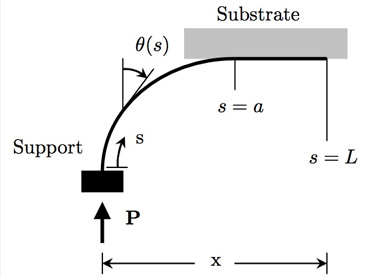
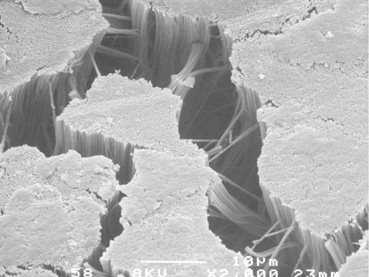
表面粗糙度对粘接强度的影响
- (2003)
表面粗糙度显著降低纤维粘接剂的粘接强度。一个悬臂纤维模型预测,当表面粗糙度从1微米增加到15微米时,粘附力下降了5倍。
[Campolo, Jones, fear IEEE Nano 2003]
-
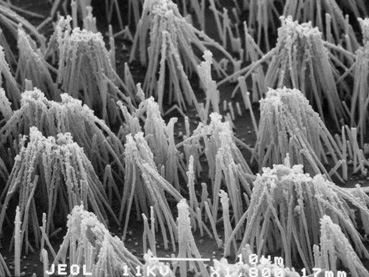
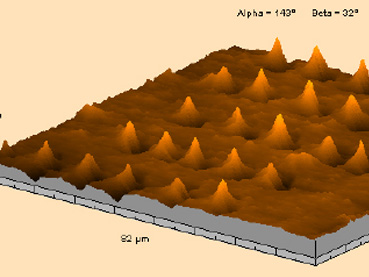
高密度纳米纤维
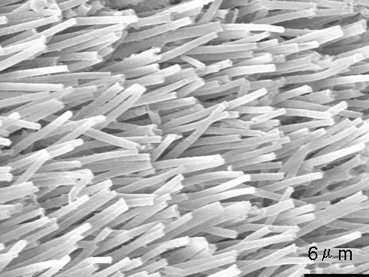
- (2003)
采用模板铸造工艺,制备出直径200纳米、长60微米的聚氨酯发丝。由于结块,粘附力有限。
-
合成抹刀数组
- (2002)
纳米压痕和铸造合成抹刀阵列。每个刮刀测量的粘附力约为200- 300nn。阵列总面积小于100x100平方。嗯。[Sitti和fear IEEE Nano 2002]
-
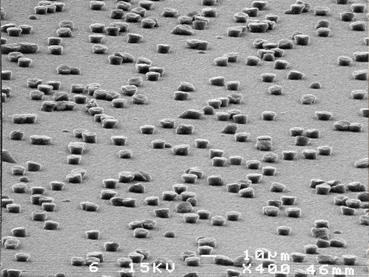
橡胶微杆阵列
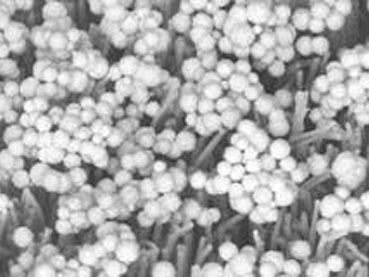
- (2002)
硅橡胶杆阵列,每根直径6um,高度6um, 0.003 N/sq。厘米。附着力为60nn /株。[Sitti和fear IEEE Nano 2002]
-
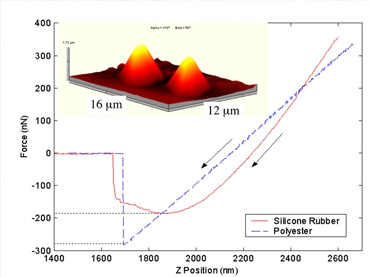
合成抹刀
- (2002)
以硅橡胶(E ~ 0.5 MPa)和聚酯(E ~ 1000 MPa)为原料,采用纳米压痕和铸造工艺制备了单铲。用原子力显微镜对单支聚酯抹刀和硅橡胶抹刀分别测量了290 nN和180 nN的拔出力。拉脱力的相似性支持了壁虎胶粘剂材料独立性的假设。(秋天et al。PNAS 2002]
扑翼飞机项目
- 扑翼飞行为在局部结构的室内环境中飞行提供了必要的高机动性。为了实现搜索和室内导航等任务的鲁棒智能,扑翼机的机动性将与一种对干扰和障碍的性质做出最小假设的学习方法相结合。该方法可为单车或多车制定最优控制策略。基于全局最优的分布式强化学习,我们提出了一种算法,用于一组扑翼机在未建模的障碍物(如门和墙)之间进行感知和导航。我们的研究将通过全三维动态模拟、多绳实验室试验台以及实际的室内飞行扑翼机来验证。
合作者:
Pieter Abbeel,加州大学伯克利分校计算机科学系教授
Robert Dudley,加州大学伯克利分校教授
-
最近的结果
-
与风洞数据相比,扑翼机自由飞行
- (2014年6月)
我们用Vicon运动捕捉系统收集的自由飞行数据来比较扑翼机的飞行,并测量风洞力和力矩值。我们确定,风洞低估了自由飞行中观察到的平衡点迎角15度,而在平均飞行速度为2m /s时,平衡速度与两组之间的误差为0.1 m/s。2014年举行(“国际机器人与自动化会议”)。
-
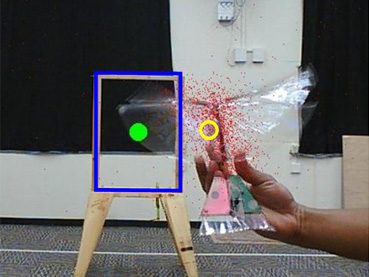
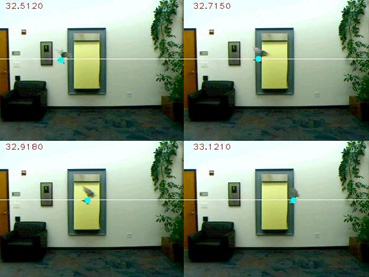
扑翼机MAV窗口遍历的协同控制
- (2013年3月)
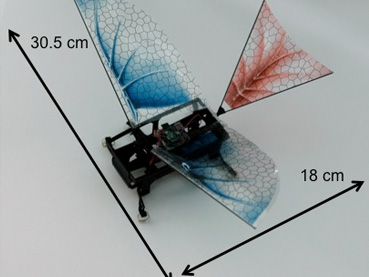
我们演示了一架13克的扑翼机和一架轻型地面站之间使用计算机视觉的协同目标搜索。H2Bird的特点是碳纤维机身、尾桨和升降舵,并携带2.8克有效载荷。地面站使用实时运动跟踪算法对扑翼机提供航向估计。一个模型准确地预测了通过狭窄通道飞行的向后可到达区域。自主代理和多代理系统(AAMAS2013)。
-
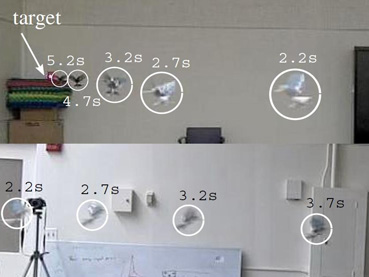
13克扑翼飞机目标寻的飞行控制
- (2011年9月)
我们展示了一架13克重的扑翼飞机的自主飞行控制,能够在没有任何远程协助的情况下飞向目标。为此,我们利用机载传感和计算资源,为扑翼机开发了一个闭环姿态调节器。
-
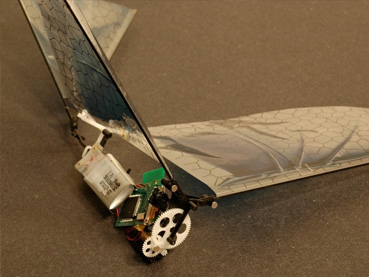
BOLT:用于运动转换的双足扑翼机
- (2011年9月)
Bolt是一架13克重的扑翼飞机,它的腿用于混合模式的运动。在运行模式下,机翼提供被动稳定性。在机翼辅助下,BOLT可以在保持与地面接触的情况下以2.5米/秒的速度运行。
-
iBird的高度调节
- (2010年9月)
我们确定了扑翼机在稳定平衡点上的自由飞行气动力,并将其与系留飞行气动力进行了比较。我们开发了一个闭环高度调节的扑翼机使用外部相机和机载电子设备。结果表明,在诱导速度为零的情况下,12克扑翼飞机的系留气动力测量结果低估了总飞行力24.8 mN。
-
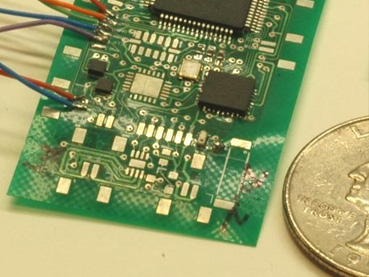
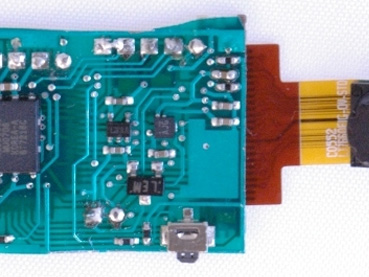
Image Proc 2.2 CPU
- (2010年8月)
图片Proc 2.2设计修订由Stan Baek。电路板包含手机,陀螺仪,加速度计,802.15.4无线电,和2通道电机驱动器在1.4克。
-
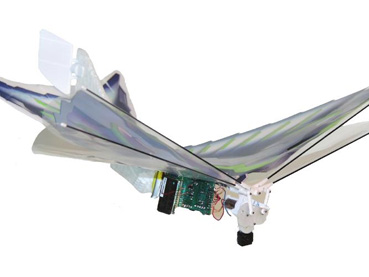
iBird-bot
- (2010)
商用iBird悬停能力扑翼机,配备ImageProc dsPIC33 CPU板。总质量12克。
-
高效振扑共振驱动
- (2009年10月)
建立了一个由电池驱动的直流电动机驱动曲柄的模型,实验表明,在共振驱动时,所需功率降低了30%。
-
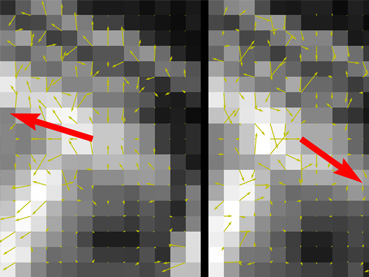
扑翼机上的光流
- (2009年10月)
由于扑翼飞行的俯仰运动,光流具有较大的叠加速度分量。该分量可以在机翼扑动频率进行采样,恢复底层信号。
-
Vamp-bot
- (2009)
商用VAMP扑翼机与定制低质量电子产品。总重量约13克,包括蓝牙和手机摄像头。
-
ImageProc 1 CPU
- (2008)
带全景摄像头的PIC CPU,由Fernando Garcia Bermudez设计。示意图ImageProc v1.0
Meso-和Milli-机器人的折叠成型
- 随着机器人体积的减小,其表面积与体积的比值会增大。因为机器人的质量与体积成正比,这个比例的增加意味着表面力(例如静电引力)与惯性力相比会变大。因此,随着机器人(以及一般的机器)变得越来越小,其运动部件的摩擦可能会成为能量损失、磨损和不可预测行为的主要来源。在Biomimetic msystems实验室,我们开发了一种名为“智能复合微结构”(SCM)的工艺,使我们能够建造小型、坚固、轻量化的机器人和结构,它们的移动能力来自于柔性聚合物铰链的弯曲,该铰链连接由碳纤维和其他复合材料制成的刚性链接。这些结构被做成单个的扁平部件,折叠起来形成更复杂的形状和连杆。它们还可以与智能驱动器集成,如压电和形状记忆合金,以提供运动。
供应链管理过程的详细信息可以在:R.J. Wood, S. Avadhanula, R. Sahai, E. Steltz, R.S. Fearing
机械设计学报,第130卷,第1期。5,2008。(链接)
纸板:SCM:上午Hoover和R.S. Fearing,折叠微型机器人的快速规模原型制作过程IEEE Int。机器人与自动化,帕萨迪纳,2008年5月。(链接)
-
原型折叠机器人
- 即使使用SCM过程,非常小的机器人也很难设计和制造。它们的尺寸使得组装具有挑战性,在二维图纸中设计三维折叠机器人的固有困难也减缓了这一过程。为了避免在设计的早期阶段出现昂贵的错误,当时许多想法将被测试和丢弃,我们使用常见的材料创建了一个规模模拟SCM过程。这个按比例设计的过程让折叠机器人设计师在20分钟内从纸上设计到功能性的按比例设计原型。快速迭代减少了过早地在小范围内进行设计和制造的风险。相反地,设计师可以在更大的范围内自由地探索各种想法,放弃失败的尝试,并快速整合过程中吸取的经验教训,从而创造出更有可能在更小范围内获得成功的设计。
原型制作过程:一步一步用六足爬虫的例子说明
- 所需设备及用品
2D CAD软件(Solidworks, CorelDraw等)
VersaLaser激光切割机
Posterboard
胶棒/热贴胶
聚酯薄膜(0.001“- 0.004”厚)
胶水(白色或氰基丙烯酸酯)
-
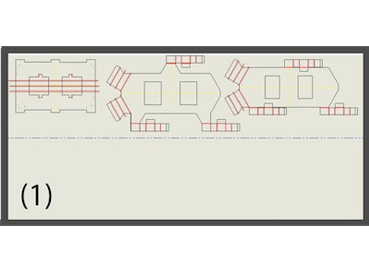
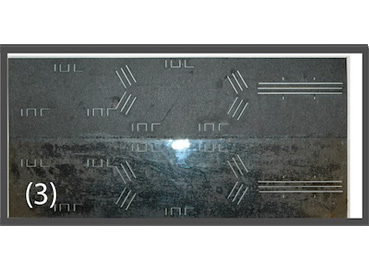
第一步:绘画
- 这个过程从支持矢量图形的程序中的二维绘图开始。在实验室中,我们使用2D CAD程序Solidworks。也可以使用像Corel Draw这样的程序。然而,Solidworks是首选,因为它提供了对尺寸的显式控制,并允许用户在图纸中定义实体之间的关系。机器人柔性铰链的线条是红色的,而代表零件轮廓的线条是黑色的。蓝色的线是为方形和刻痕工件。这些线在不同的时间被切断-原因将在下面的步骤中解释
-

2 .修剪屈曲
- 蓝色的线条首先被切割成方形,并在中间形成一条折线。工件被折叠和弯曲切割,创建镜像切割工件显示在图片右侧。
-
第三步:弯曲层插入
- 胶水覆盖工件的内表面,一块足够大的聚酯覆盖所有弯曲切口放置在一个内表面上。(或者,海报板可以用热贴膜预压在内表面。)将工件折叠起来,将聚酯薄膜夹在两面之间。要注意调整柔性切口。可以通过对着一盏灯来检查是否对齐
-

步骤4:层压
- 折叠后的工件在滚轮施加最大压力的情况下通过热覆膜机。这一步骤确保了粘贴海报到聚合物柔性膜。得到的三明治现在已经准备好了,可以在激光切割机上切割零件轮廓。
-
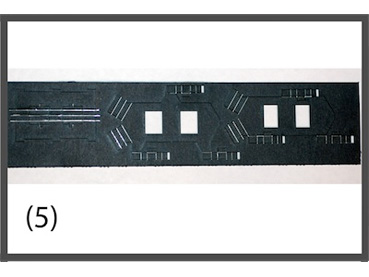
第五步:裁剪轮廓
- 三明治被放回激光切割机中。重要的是要将工件放回与步骤2相同的方向,当弯曲被切断。零件的轮廓现在已经裁剪好了。左边的图片显示零件的轮廓被切割,但没有从工件上移除。
-
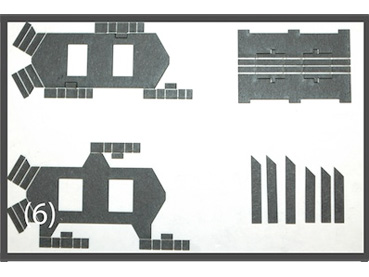
第六步:释放部件
- 零件现在可以从工件中弹出。结果是整合的,铰接部分与铰链,在图纸中放置弯曲的切割线和刚性的海报之间的连接。
-
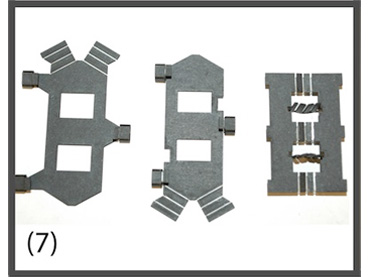
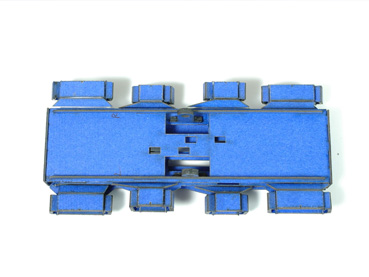
第七步:预折叠连杆
- 如果任何部件包含连杆,可以在部件连接之前折叠,他们可以在这一点上折叠和粘合。在左边的图片中,通过折叠连接到左边两个部分的链接,创建了四个连杆。当整个结构组装好后,这四根杆将构成一个六足机器人的臀部。右边的部分被折叠成Sarrus连杆。这个连杆位于成品机器人的中间,通过收缩和扩张来提升和降低两组三条腿(三脚架)。
-
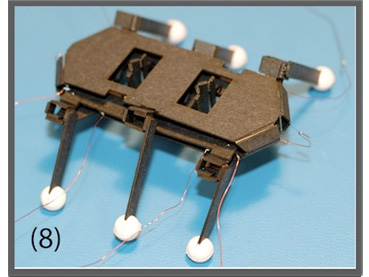
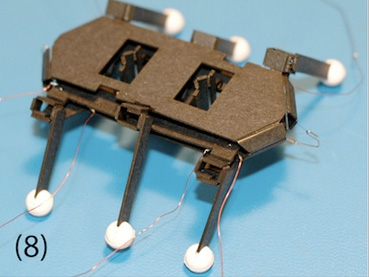
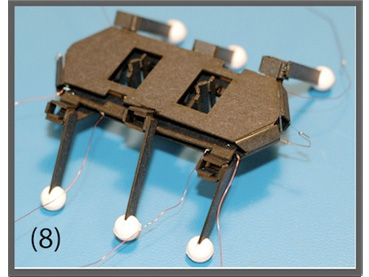
步骤8:最终组装
- 单个部件或子组件现在可以组装。在右边的照片中,从步骤7的三个盘子粘在一起。最左边的盘子在下面,Sarrus连杆在中间,步骤7图片中间的盘子在上面。腿也被粘到四杆臀部和腿的末端安装了球形硅橡胶脚。
例子的结构
-
SMA驱动履带
- 这些文件用于切割形状记忆合金驱动的爬虫显示在上面的电影。
-

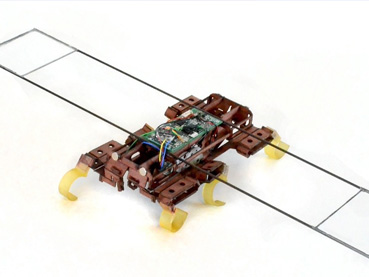
电机驱动的昆虫
- 直流电动机也可以集成在分步说明中组装的履带上。这种履带使用相同的运动学,但经过修改,以适应电机和齿轮传动系统。柔性铰链也可以用作弹簧。在这个原型中,腿部增加了一个轻微弯曲的膝盖,以实现少量的顺应性。
-
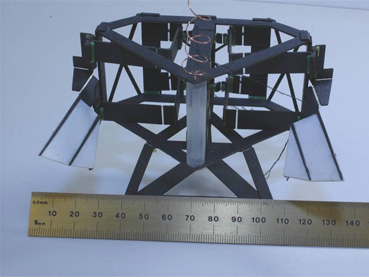
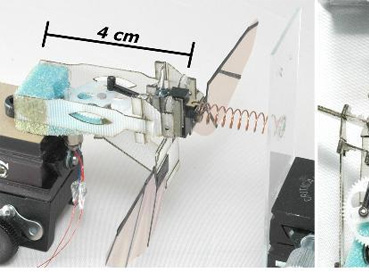
微型机械飞虫的5X比例模型
- 这种微机械飞行昆虫每只翅膀上有两个驱动器。每个驱动器驱动一个滑块曲柄连接到一个4杆。一对四杆驱动一个球面四杆,球面四杆作为机翼的铰链。每个机翼有2个自由度,并使用15个关节连杆。总的来说,模型使用30个弯曲接头,另外30个固定接头用于结构/空气框架。
-
OctoRoACH机器人
- A. Pullin设计的OctoRoACH机器人(Pullin et al.)ICRA 2013)。OctoRoACH每侧使用1个直流电机。变速箱可以在小型飞行玩具中找到,如VAMP。
使用其他材料制作原型
-
...
- 虽然海报板是一种方便的材料,很容易获得,便宜,并相当坚固,对于驱动模型,更稳健的工程材料是可取的。我们最近延长了这个工艺,使用G10玻璃纤维。G10提供了比纸板更高的特定模量,并在受到重复驱动循环时更稳健。玻璃纤维的使用也使得将印刷电路板直接集成到机器人的骨架中成为可能。
-
MEDIC微型机器人具有身体支撑的攀爬功能
- (2010年12月)
medicc机器人由玻璃纤维薄板制成,质量为5.5克,使用静态SMA驱动器可以在1毫米内定位。该机器人包括摄像头和无线。








































































