类别
机器人
21日xx
大厅地图/类别
大厅26
以前的
...伦敦帝国理工学院
萨拉戈萨大学
耶路撒冷希伯来大学…
下一个
以前的
下一个
导航:
EXPO21XX
>
机器人21 xx
>
H26:医疗机器人
萨拉戈萨大学(UZ)
萨拉戈萨大学
概述
业务概况
详细联系方式
网站
发送电子邮件
分享:
视频
载入播放器…
提供配置文件
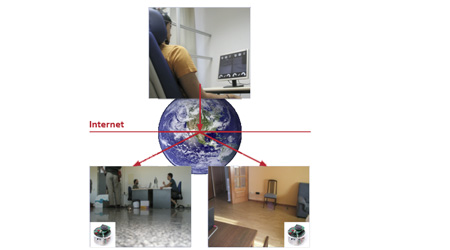
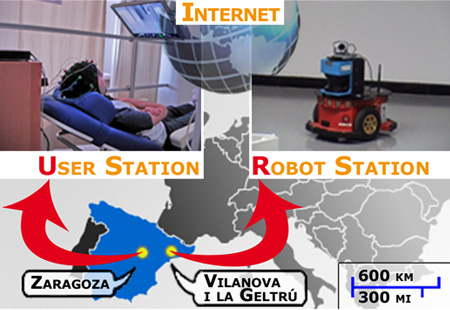
2008年6月的第一周,萨拉戈萨大学的一个研究小组在两个相距260公里的偏远城市之间实现了一个由大脑驱动的机器人远程操作。在一周的时间里,五名受试者使用脑机接口与机器人在偏远的地方开发导航和视觉探索任务。记录人体神经活动的非侵入性方法是脑电图,萨拉戈萨和巴塞罗那之间的通信通道是互联网,移动机器人配备了定向摄像头和自主导航系统。
产品组合
萨拉戈萨大学神经技术项目
萨拉戈萨大学神经技术实验室在“神经技术”领域拥有广泛的知识,在大脑状态的实时检测和相应的数据分析方法,以及随着技术发展的实验性脑成像技术(特别是EEG和MEG)方面具有丰富的经验。本研究的技术应用领域是神经修复(机器人)和神经治疗(神经反馈)。
脑驱动机器人轮椅
更多信息
在这个项目中,我们构建了一个大脑驱动的机器人轮椅,为严重神经肌肉残疾的人提供一定程度的活动能力。在操作过程中,用户将面对一个显示实时虚拟场景重建的屏幕,并专注于要到达的位置。脑电图(EEG)信号处理检测到用户的意图,这些意图被传输到自主导航系统,驱动轮椅到达所需的位置,同时避免与传感器检测到的障碍物发生碰撞。这一概念为用户提供了操作设备的灵活性,即使是在未知或不断发展的情况下。该原型已经在萨拉戈萨大学的用户中进行了测试和验证
脑驱动机器人远程呈现系统
更多信息
该项目探索了脑驱动远程呈现机器人在远程场景下对瘫痪用户的好处。病人们——不能离开他们的临床环境——被提供了一个体现在真实环境中的实体(世界上任何一个有互联网接入的地方),准备好感知、探索、操作和互动,仅由大脑活动控制。该系统的基本思想是脑机系统解码用户的意图;这些意图通过网络传递给机器人系统,最终机器人自主执行任务。用户可以在导航模式(控制机器人运动)、探索模式(控制相机方向)和交互模式(通过声音和简短的表情进行交互)之间切换。萨拉戈萨大学的用户已经对该设备进行了评估
巴塞罗那理工大学
,以及医院的病人
图宾根大学
萨拉戈萨大学的机器人。
脑驱动机械臂假肢
该研究项目的总体目标是开发新一代的脑控制机械臂,使用更自然和直观的控制策略进行操作。该项目专注于增强人类能力,以弥补运动功能的下降,特别是对那些需要自主操作和抓取的用户。研究结果将通过用户在家中使用大脑控制的机械臂进行日常操作进行演示。此外,该项目与
Faktronik基金会
,该公司将开发功能刺激系统(FES),以完成患者手臂的运动,作为机械臂的替代方案。
低成本机器人的脑驱动远程呈现
这个项目探索了脑驱动远程呈现系统的好处,在不同和遥远的地方有几个低成本的机器人。该系统可以通过大脑活动同时控制位于世界任何地方(有互联网连接)的两个机器人的运动,还提供了交互功能。这种移动机器人是低成本的系统,便于携带(一只手就可以携带),并配有手机摄像头。该原型已经由萨拉戈萨大学的用户进行了测试和验证。
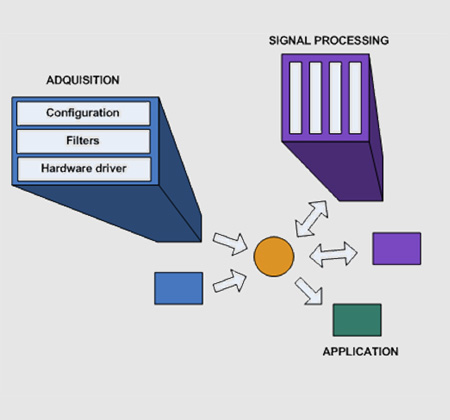
脑机接口软件体系结构
这个项目探索了一种新的软件架构的好处,专注于脑机接口和神经反馈应用,绕过现有的限制。一种模块化的、灵活的、可移植的体系结构正在开发中,它将支持从多个硬件设备采集信号,同步它们,并同时为不同的应用应用几种信号处理算法。此外,它将根据脑机接口需求提供通用功能,以及与机器人架构和其他通用交互框架的互操作性。
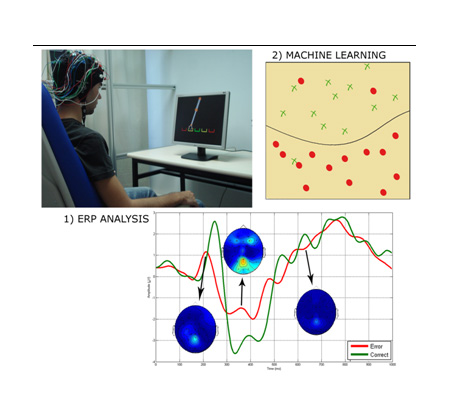
脑机接口的机器学习
在这个项目中,正在开发机器学习技术来识别和检测在线神经生理事件,这对于基于脑电图的脑机接口是有意义的。在单个试验中,已成功开发出识别在线P300和错误相关电位的技术。该技术基于多个空间过滤器和先进的监督模式识别策略,以适应每个特定用户的性能,以及处理不同天数的脑电图的非平稳性。研究结果已应用于机器人控制和在线误差检测与校正。
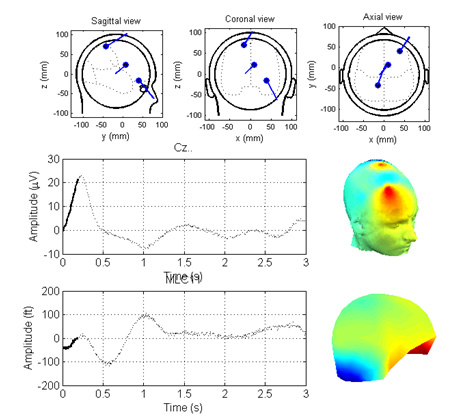
脑电和脑磁图动态源定位方法
在该项目中,通过同时使用脑电图(EEG)和脑磁图(MEG)记录或单独使用每种模态,开发了新的方法来定位动态大脑活动的神经过程。为此,在贝叶斯框架内开发了一种考虑神经激活的动态性质的方法来解决源定位问题。该方法的优点是:(1)处理了问题的可变多维度,(2)同时处理了不同区域的不同大脑动态,(3)具有实时性。该技术已经通过来自现实神经生理条件和大脑激活过渡的模拟脑电图和脑磁图数据,以及在特定神经生理协议中记录的真实脑电图和脑磁图数据进行了验证,该协议旨在引出错误相关的电位。该方法正在使用不同的神经生理学协议进行测试,并解决诸如癫痫病灶识别等常见问题。
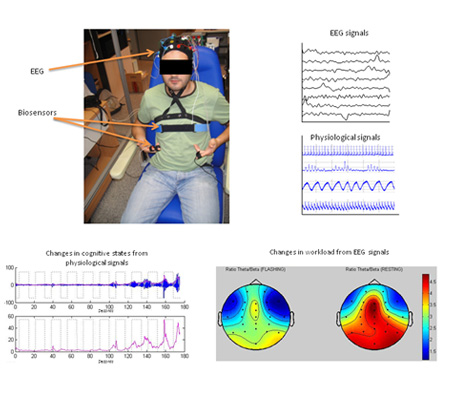
脑机接口与生物信号的认知状态识别
在这个项目中,正在开发一个自动系统,通过生理记录(心电图、皮肤导电性、体温、呼吸等)和脑电图信号来识别认知状态(放松、压力等)。该系统用于在使用BCI系统的同时对用户进行生理理解和评价。为了提高用户-机器的适应性、性能和健壮性,这种类型的系统是相关的。该系统正在与ALS患者合作进行测试
图宾根大学
。对网真机器人的评估结果表明,患者在使用P300 BCI控制机器人的同时,可以识别出各种认知状态,如放松和压力,以及“警觉”和“分心”状态之间的变化。
关注注意缺陷多动障碍(ADHD)的神经反馈
注意力缺陷多动障碍是一种精神障碍,据报道,美国约7%的儿童患有这种疾病。尽管绝大多数研究表明,药物治疗可以对其核心症状产生积极作用,(i)约25%的患者表现出不良反应或无反应,(ii)没有证据表明在没有持续、长期治疗的情况下,临床改善仍在继续,(iii)长期使用兴奋剂治疗存在风险。在这个项目中,一个基于脑电图的脑机接口系统正在开发,用于治疗ADHD的核心症状的临床治疗。脑电图生物反馈涉及操作性条件反射技术的应用,为患者的某些“神经反馈行为”提供视觉和听觉“反馈”,在特定频带内加强或抑制电生理活动,可能产生持续的临床效益。
大厅地图/类别
大厅26
以前的
...伦敦帝国理工学院
萨拉戈萨大学
耶路撒冷希伯来大学…
下一个
以前的
下一个