类别
机器人
21日xx
会堂图/类别
大厅25
以前的
...Université布鲁塞尔自由图书馆(ULB)
康奈尔大学
奥克兰理工大学…
下一个
以前的
下一个
导航:
EXPO21XX
>
机器人21 xx
>
H25:人工智能,IT和计算机视觉
康奈尔大学
康奈尔大学
概述
业务概况
详细联系方式
网站
发送电子邮件
分享:
视频
加载播放器…
提供配置文件
在康奈尔计算综合实验室,我们探索了生物启发的计算和物理过程,允许复杂的高级系统从低级构建块自动产生。我们为工程寻找新的生物学概念,并为生物学寻找新的工程见解。
计算综合实验室由来自工程、计算机科学、物理、数学和生物学等各个学科的研究人员组成。我们正在研究自组织和进化现象,以及它们在工程设计自动化和理解自然系统复杂性方面的应用。我们正在开发各个领域的抽象模型和应用程序,并构建工作系统来测试新想法。还有许多悬而未决的问题,但如果这些过程能够被理解和利用,这将是工程的未来。
产品组合
计算综合实验室博士后研究项目
开源模块化机器人
更多信息
模块化机器人的吸引力在于其潜在的多功能性、坚固性和低制造成本,然而,这些优势尚未实现。由于专业知识水平高,制造和操作成本高得令人望而却步,大多数模块化机器人的研究仅限于选定大学的少数专业实验室。
我们建议通过将模块化机器人提供给更多的研究人员、爱好者和业余爱好者,我们消除了进入的障碍,加速了该领域的进步。我们创建了一个基于维基的门户网站,为所有感兴趣的研究人员和爱好者提供一个开源的、可扩展的模块化机器人系统。
机器人功能损伤补偿自建模
更多信息
动物通过创造不同质的代偿行为来维持受伤后的操作能力。尽管这种健壮性在工程系统中是可取的,但大多数机器在面对意外损坏时都会失败。我们描述了一个机器人,可以从这种变化自主恢复,通过持续的自我建模。四足机器使用驱动-感觉关系来间接推断自己的结构,然后使用这个自我模型来产生向前运动。当腿部部分被移除,它适应自模型,导致生成替代步态。这一概念可能有助于开发更健壮的机器,并阐明动物的自我建模。
机器自我复制:完整的机器人重建
更多信息
害怕机器接管?对不起。
在这里,我们展示了几台由我们的MolecubesTM构建的机器,它们可以构建自己的副本,可以构建自己的副本等。这里的机器人只被设定为繁殖。当然,它们可以被编码来做其他事情。
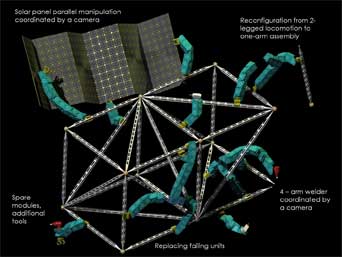
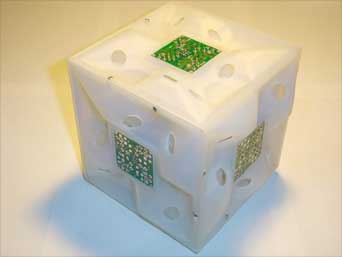
三维随机重构:实体零件修复
更多信息
这个项目是由保罗·怀特在2002年开始的。我在2004年加入了这个项目,并帮助Paul重新设计了第二个系统原型(如图所示)并进行了最终的实验。
项目目标是构建0.2 ..0.5毫米零自由度的机器人,在随机移动时,将能够以可编程、可重构的方式相互结合。我们计划将此过程用于可重构的高分辨率任意三维形状形成。
我的部分项目包括建立和实验一个大规模的原型。Mike Tolley目前正在研究微型系统的实现。
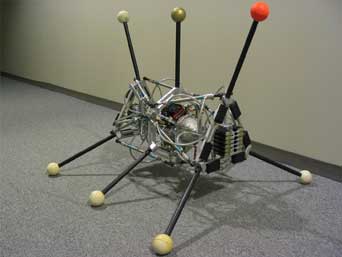
通过物理体验设计自主控制器
更多信息
在这个项目中,我们与Hod Lipson和Josh Bongard一起,在一个真正的物理机器人nonape上进化了运动控制器。它是一种气动并联驱动机器人,内部有12个非铰接自由度。
我们最初的目标是在物理机器人上进化动态步态,目前已经完成:进行了两次硬件进化运行;结果,进化出了几种动态运动模式。所有这些步态都使用开环控制器。
PhoneBot:损伤复原模块系统
更多信息
本项目将上述四个项目的成果整合在一个系统中。在这里,我们建议将手机与我们基于MolecubesTM的机器人乐高组合结合起来,构建多功能损伤复原机器人。
20年后,手机将无处不在,而且几乎是免费的。它们将包括语音通信和信息传递功能,以及办公应用程序、日程安排、摄影、个人媒体娱乐、无线互联网接入等。另一方面,这种低成本和高计算能力的结合将使手机成为欠发达经济体中许多人唯一负担得起的计算设备。
会堂图/类别
大厅25
以前的
...Université布鲁塞尔自由图书馆(ULB)
康奈尔大学
奥克兰理工大学…
下一个
以前的
下一个