- 提供配置文件
- 光场相机是一种新型的3d相机,捕捉一个标准的图像和场景的深度信息。度量的3D信息可以通过单个光场相机通过单个镜头在单个镜头中使用可用的光来捕获。Raytrix公司致力于开发用于工业应用的光场相机。
产品组合
光场技术

-
工业4.0三维光学检测
-
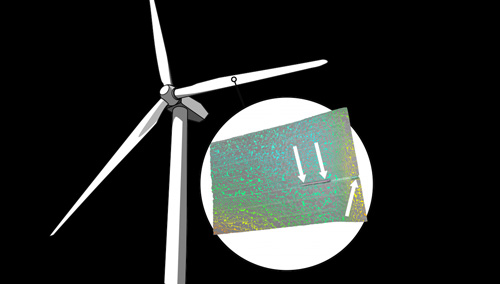
- 对自动化光学检测系统的需求也在不断增长,其中也包括第三维度。使用Raytrix光场相机,你不仅可以测量2D,还可以用单台相机、单次拍摄和标准照明进行3D测量。为什么不把你目前的AOI系统中的2D摄像头换成相同尺寸的3D摄像头呢?
-
三维工厂分析
-
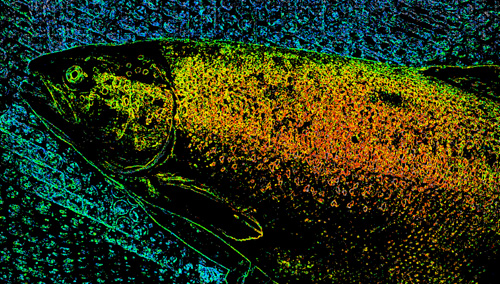
- 你可以只用可用的光,甚至近红外光来捕捉植物的2D图像和3D形态,以确保你的测量不会干扰植物的生长。该系统对于户外使用也很健壮,因为只需要一张图像。因此,植物的运动,例如由于风,是没有问题的。
-
三维流体力学
-
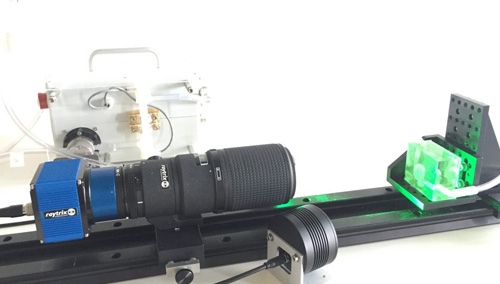
- 通过一个单一的Raytrix光场PTV摄像机,您可以捕捉两个:三维粒子位置和三维粒子速度在一个体积。Raytrix相机使用的专利微透镜阵列设计提供了最佳的景深和有效分辨率的组合,这使他们成为市场上分辨率最高的光场相机。
-
3 d机器人
-
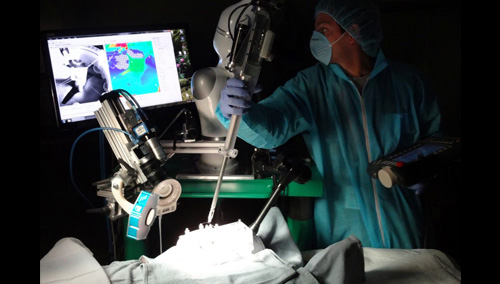
- Raytrix相机具有扩展的景深、较小的占地面积和单摄像头捕捉2D和3D数据的能力,在单次拍摄中,也在视频帧率下,这使它们成为机器人的理想选择。在末端执行器上放置一个Raytrix光场相机,以测量深度和捕捉图像,即使在近距离。
-
三维显微镜
-
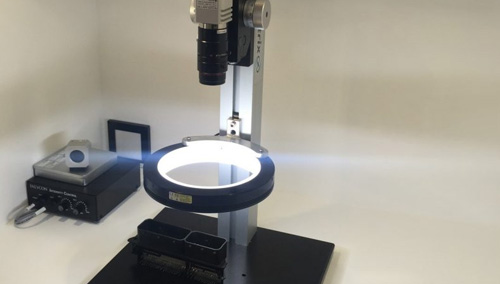
- 你有一个标准的显微镜,想要进行三维度量吗?没有问题-只要附上一个Raytrix 3D显微镜相机,你就准备好了。因为你只需要一台相机,一次拍摄和标准的照明,你的帧率只受相机电子设备的限制。
-
8k超高分辨率
-
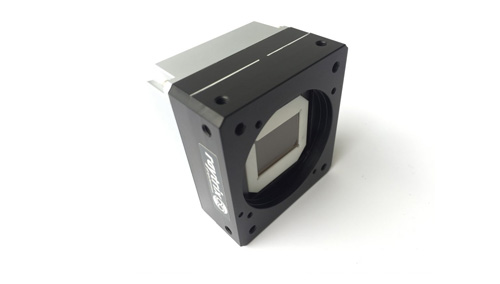
- 4200万像素的分辨率,40x40x27mm的摄像头和USB3连接:这是我们的2D摄像头C42。非常适合不遗漏任何细节的应用,如安全性,PCB检查,机器人和摄像头阵列。该相机可与c座,也集成了高分辨率光学。
3d光场相机解决方案
三维光场摄像机
-



R8 / r42系列
-
- R42是我们迄今为止分辨率最高的光场相机。基于42兆传感器,它提供了高达1000万像素的有效分辨率,每秒7帧。
传感器
- 分辨率:4200万像素,7716 x 5364像素
- 有效分辨率高达1000万像素
- 像素大小:1.12 μ m平方像素
- 互补金属氧化物半导体,滚动快门
- 颜色,HDR
包
- USB3接口
- 高达7帧/秒
- 尺寸,39 × 39 × 31.2毫米
- c-mount
微透镜阵列
-

R12 / r25 / r50系列视频
-
- R12提供了传感器分辨率为12兆帧的最高帧率,这导致有效分辨率高达300万像素60帧/秒(R25提供625 MP @ 80帧/秒)。
传感器
- 分辨率:12兆,4096 x 3068像素
- 有效分辨率高达300万像素
- 像素大小:5.5 μ m平方像素
- 互补金属氧化物半导体,全球快门
- 单色,颜色,近红外光谱
包
- Camera-Link接口
- 高达60帧
- 尺寸,71.8 x 75.5 x 28.7毫米
- F-mount、M58
微透镜阵列
- 聚合物在玻璃
- 光圈:f/2.4, f/5.6,或定制版本
-
R29 / r47系列
-
- R29提供了高分辨率的大,低噪声像素。它是正确的选择,如果您需要最高质量的输出,在高有效的分辨率。这款相机也是PIV和PTV客户的标准选择。
传感器
- 分辨率:2900万像素,6576 x 4384像素
- 有效分辨率高达700万像素
- 像素大小:5.5 μ m平方像素
- CCD,全球快门
- 单色,颜色,近红外光谱
包
- 双GigE接口,最高5.9帧/秒
- CamLink接口,最高5.9 fps
- 尺寸:70 x 71 x 55.4 mm
- F-mount、M58
微透镜阵列
-

R5系列
-
- 这是我们的相机,传感器分辨率最低,但帧率最高。如果您需要以高达180帧/秒的速度捕捉3D图像,这是理想的选择。
传感器
- 分辨率:4兆,2048 x 2048像素
- 有效分辨率高达100万像素
- 像素大小:5.5 μ m平方像素
- 互补金属氧化物半导体,全球快门
- Mono、颜色、近红外光谱
包
- 双千兆,USB 3.0,摄像头- link接口
- 高达180帧/秒
- 尺寸:52 x 52 x 37毫米
- c-mount
微透镜阵列
- 聚合物在玻璃
- 光圈:f/2.4, f/5.6, f/26.0,或定制版本
三维显微镜相机
- 你有一个标准的显微镜,想要进行三维度量吗?没有问题-只要附上一个Raytrix 3D显微镜相机,你就准备好了。因为你只需要一台相机,一次拍摄和标准的照明,你的帧率只受相机电子设备的限制。
-

R10微系列
-
- R10微型是为显微镜使用而设计的。它提供低噪声,高分辨率和单色输出,避免拜耳模式工件。1000万像素的传感器分辨率允许高达250万像素的有效分辨率。
传感器
- 分辨率:1000万像素,3840 x 2672像素
- 有效分辨率高达250万像素
- 像素大小:2.24 μ m平方像素
- 互补金属氧化物半导体,滚动快门
- 单色
包
- USB3接口
- 高达7帧/秒
- 尺寸,39 × 39 × 31.2毫米
- c-mount
微透镜阵列
-


R12微系列
-
- R12显微镜是专门用于显微镜的。它的3.1 μ m的大像素和1200万像素的传感器分辨率的传感器大小,是标准显微镜的最佳选择。高达300万像素的有效分辨率允许大范围的放大。
传感器
- 分辨率:1200万像素,4224 x 2838像素
- 有效分辨率高达300万像素
- 像素大小:3.1 μ m平方像素
- CCD,全球快门
- 单色、颜色
包
- GigE接口
- 高达5.5 FPS
- 尺寸,38 × 38 × 45毫米
- c-mount
微透镜阵列
2d高分辨率摄像机
- 4200万像素的分辨率,40x40x27mm的摄像头和USB3连接:这是我们的2D摄像头C42。非常适合不遗漏任何细节的应用,如安全性,PCB检查,机器人和摄像头阵列。该相机可与c座,也集成了高分辨率光学。
-



促系列
-
- C42 COLOR/MONO是我们的高分辨率2D相机,基于4200万像素传感器和高达7fps的帧率。尽管它的分辨率很高,但它很小,你可以在任何地方使用它。
传感器
- 分辨率:4200万像素,7716 x 5364像素
- 像素大小:1.12 μ m平方像素
- 互补金属氧化物半导体,滚动快门
- 颜色,HDR
包
- USB3接口
- 高达7帧/秒
- 尺寸,39 × 39 × 31.2毫米
- c-mount
-

C42I系列
-
- C42i COLOR采用了与C42相同的4200万像素高分辨率2D传感器,但它的集成镜头使其更加紧凑。
传感器
- 分辨率:4200万像素,7716 x 5364像素
- 像素大小:1.12 μ m平方像素
- 互补金属氧化物半导体,滚动快门
- 颜色,HDR
包
- USB3接口
- 高达7帧/秒
- 尺寸,39 × 39 × 31.2毫米
- 集成的镜头
3d光场相机专业应用
-
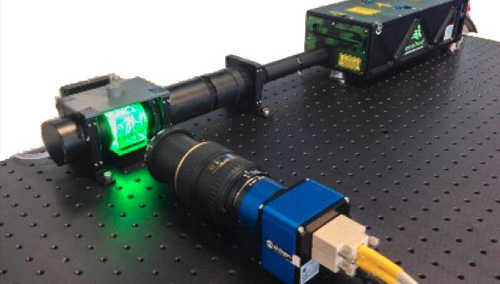
流量piv & PTV
-
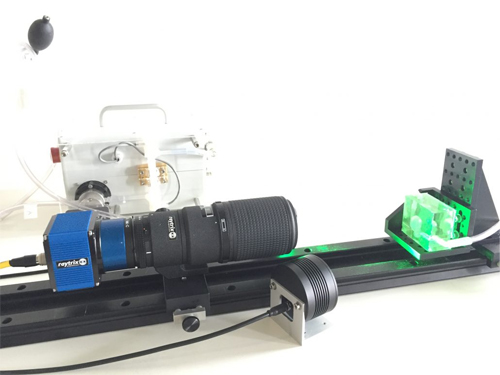
- 全新的可能性
通过一个单一的Raytrix光场PTV摄像机,您可以捕捉两个:三维粒子位置和三维粒子速度在一个体积。Raytrix相机使用的专利微透镜阵列设计提供了最佳的景深和有效分辨率的组合,这使他们成为市场上分辨率最高的光场相机。
单摄像头体积PTV
3D粒子位置和3D速度与单个摄像机
简单的度量校准
相机可以很容易地用Raytrix软件RxLive进行计量校准。
通用的应用程序
许多不同的相机类型,包括双镜头,高速捕捉和微型PTV。
-

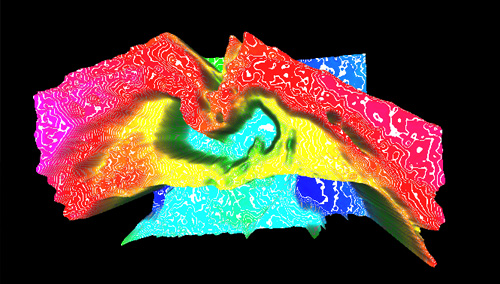
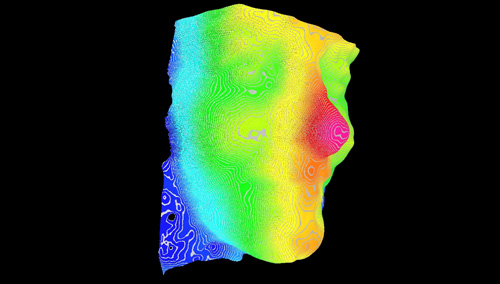
自动光学检测(aoi)
-
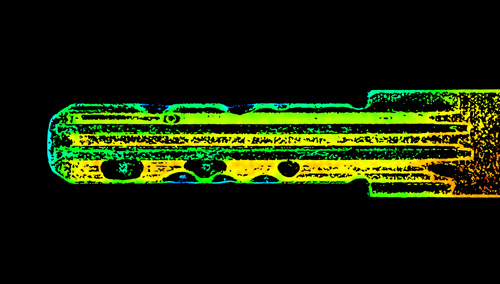
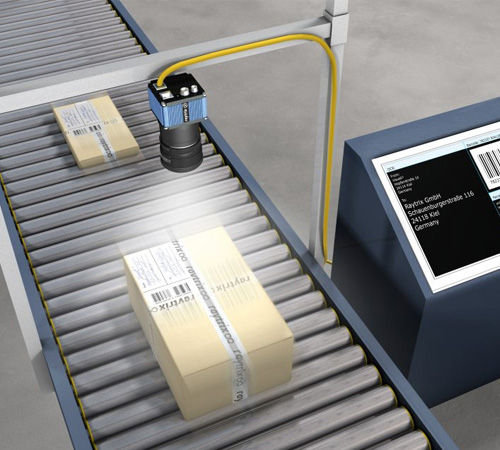
- 全新的可能性
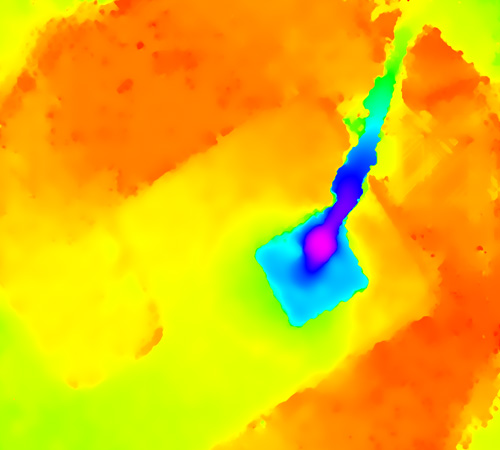
用一个单一的Raytrix光场3D相机,你可以捕捉:3D物体表面和2D物体图像。与标准相机相比,Raytrix相机使用的专利微透镜阵列设计扩展了景深,并提供了高效的分辨率,这使它们成为市场上分辨率最高的光场相机。
从单个摄像头获取2d和3d数据
一个标准的2D图像和3D表面轮廓可以通过一个单一的Raytrix相机的一次曝光来计算。
快速图像捕获
由于只需要一个图像,图像可以拍摄在高帧率也与闪光灯。
这是其他3d系统做不到的
非常适合用于小型物体或深层结构。
光场摄像技术
-
-
它是什么?
- 我们的光场相机可以让您在一次拍摄中仅使用一台相机和一个主镜头,就可以同时记录一个场景的2D图像和度量校准的3D深度信息。
这通常适用于标准照明,甚至闪光灯。对于困难的表面,也可以使用模式投影仪。曝光时间只受相机电子设备和可用光线的限制。相机内部不进行处理,它们只是将原始图像传送到PC上,然后在GPU上处理以获得2D和3D数据。
原则上,我们可以把任何相机变成光场相机。不过通常情况下,我们的库存相机就能满足你的需求。我们有USB3、GigE或CamLink连接类型的相机,具有不同的帧率、分辨率和传感器大小。大多数相机有彩色和单色版本,有些有近红外版本。查看我们的产品页面以获得完整的概述。
-
它是如何工作的?
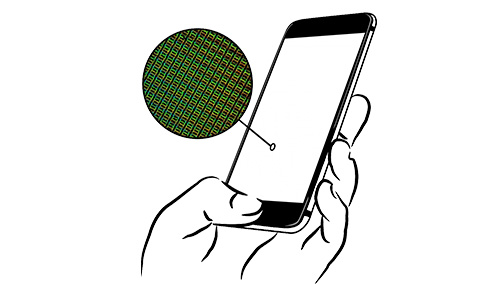
- 为了从单次拍摄中获得2D和3D数据,我们主要需要两样东西:微镜头阵列(MLA)和软件算法。
MLA被放置在相机内部的图像传感器前面,图像传感器将变成一个微型相机阵列(见右图),每个微型相机从略微不同的角度看到中间图像的一部分。也就是说,我们可以选择一个主镜头来选择想要的视场,并在微相机阵列前创建中间图像,而不是使用一个大的相机阵列来直接观察物体。在该设置中,由相机生成的图像在PC上使用适当的软件算法进行处理,以计算场景深度并重建二维图像。
我们所有的处理都是在GPU上完成的,这通常允许我们每秒处理5张12兆的原始图像,从而产生每秒3000万像素的2D和3D图像(30fps)。
-
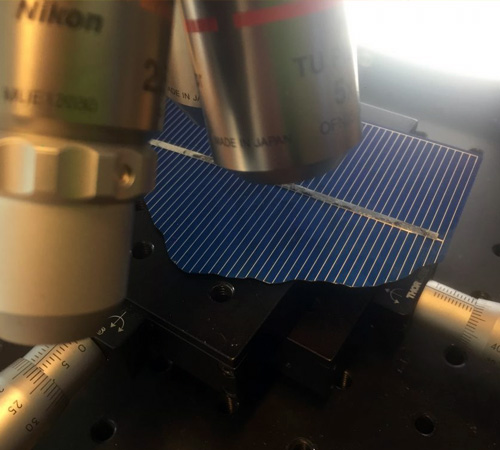
我为什么要用它?
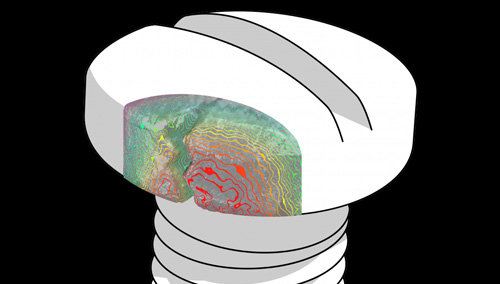
- 我们的3D光场相机对小物体效果特别好。你可以使用标准镜头、远心镜头或显微镜来选择所需的视场和深度分辨率。专利微透镜阵列提供了高效分辨率和扩展景深的最佳组合。因为你只需要一台相机和一个镜头,你可以
- 估计一个圆柱形外壳内物体的三维位置
- 使用闪光灯或频闪仪以高帧率拍摄移动物体的图像
- 通过标准显微镜单次拍摄获得三维数据。
有效横向分辨率最多为传感器分辨率的四分之一,深度分辨率约为总景深的1%。绝对值取决于所用的主透镜。典型的应用领域有:
- 工业自动化光学三维检测。
- 流体力学研究中的单接入点三维流量测量。
- 3D植物分析用于育种、采摘或除草。
- 用于工业零件的3D显微镜。
-
还有什么?
- “非免费午餐”定理也适用于此:你可以一次性获得2D和3D数据,但你需要支付有效的横向分辨率。我们的相机最大有效横向分辨率约为传感器分辨率的四分之一。这种有效的横向分辨率在整个井深范围内也有所不同。相机是通过将主镜头聚焦到你感兴趣的最远平面来设置的。从这个平面到相机的深度可以计算和重建一个二维图像。这个平面后面的一切都是无法重建的。有效的横向分辨率在焦点平面是最高的,并随着你接近相机而下降。
深度分辨率通常是总景深的1%,这反过来取决于主镜头的焦距和焦点设置。同一光场相机可选择不同主镜头,根据需要调整景深。然而,视场越大,景深就越大,你需要离主镜头越近才能获得良好的景深分辨率。特别是,这意味着光场相机结合广角镜头只能看到靠近主镜头的深度差。
另一方面,光场相机在宏观领域工作得很好,包括显微镜和望远镜。



















































