类别
自动化
21日xx
大厅地图/类别
大厅05
以前的
...科希策工业大学
以色列理工学院
德克萨斯大学阿灵顿分校…
下一个
以前的
下一个
导航:
EXPO21XX
>
自动化21 xx
>
H05:大学和机器人研究
以色列理工学院
以色列理工学院
概述
业务概况
详细联系方式
网站
发送电子邮件
分享:
视频
载入播放器…
提供配置文件
机器人头部项目(启动于2011年冬季学期)旨在探索与之交互的肌肉控制的人类表情和面部情绪,以及计算机环境,使伺服电机能够模仿肌肉运动。
产品组合
Technion的机器人头项目- Perlins
希伯来语的意思是:计算机控制的可表达的机器头
机器人头部项目(启动于2011年冬季学期)旨在探索与之交互的肌肉控制的人类表情和面部情绪,以及计算机环境,使伺服电机能够模仿肌肉的运动
机器人头项目是:
设计和表演:UG学生Roee hershko先生,
由robot实验室总工程师Kobi Kohai先生监督
项目于2012年3月顺利完成。
项目描述如下:
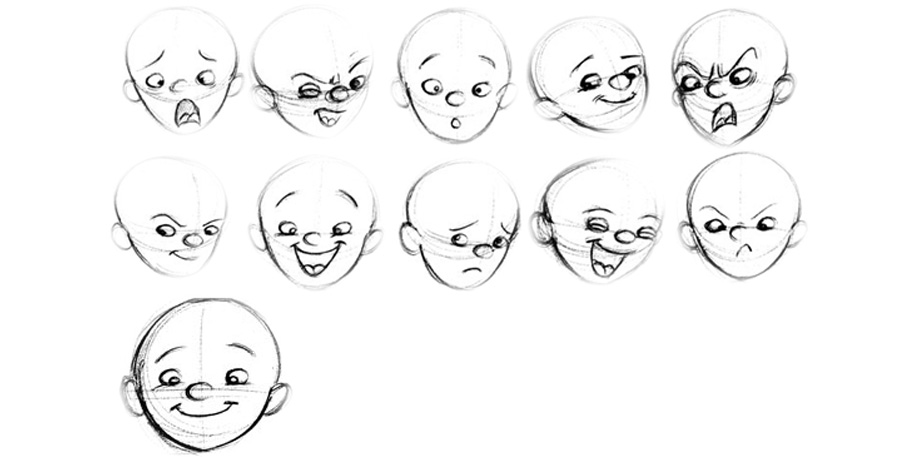
假设你可以用25个伺服电机控制一个机器人头部,你能想象出哪些情绪?
机器人的表情
头部包含25伺服电机在以下位置:
1.眉毛
2.眼皮
3.眼睛
4.嘴唇
5.Mought &下巴
6.脖子
所有伺服发动机控制使用
脉宽调制
脉冲。
-为了控制伺服电机,使用了一个微控制器(Microchip的PIC18F6390),提供以下任务:
通信控制(整个系统的进出)。
PWM -角度(度)转换。
面部表情算法。
时序要求(用于PWM脉冲创建)。
启动和定期测试(检查COM、电压、完整性检查、数据包校验和)。
为了传达一种情感-微控制器从PC接收命令,使用一个操作工具,这是我用c#写的,发送数据包(在正确的形式,稍后描述),控制一个单一或多个伺服引擎一次移动在0 - 180度(或-90 - +90度,取决于你的校准启动点)。
以下是对世界各地大学其他类似项目的一些学术评论:
FLOBI -德国北菲尔德大学,特色:
1.
18自由度(自由度,又名伺服发动机)。
2.
包括眼摄像机
3.
团队由6名工程师、研究人员、教师组成
妥善保管。
4.
建造它是为了避免“恐怖谷”。
ICUB -里斯本大学,葡萄牙,特色:
1
.
特殊儿童互动设计。
2.
6个自由度
3.
自2006年以来在进行中(估计价格-数
几百K美元)
WE-4RII -日本早稻田大学,特色:
1.
22面部自由度(包含更多的整个身体
功能)
2.
包含眼摄像头,有对焦控制
3.
包含多级表达式算法。
4.
预算设定为-几百K美元。
5.
与意大利ARTIS实验室成立合资公司。
6.
包含复杂的力学。
perlin的机器人
具有25自由度- 25伺服发动机在整个头部,使创造一个广泛的表达式阵列。
硬件是根据以下规格和见解开发的:
1.
两个独立的电压调节器(一个电流高达0.5 A,用于uController),(一个伺服发动机,高达7A)。
2.
外部晶体的uController精度(需要PWM创建)。
3.
光耦合器,缓冲低功耗(uController)和高功耗(伺服发动机)之间。
4.
导体和电线压力表能够承受高电流消耗。
5.
Flash可编程64针微处理器,51 I\O端口(我把它变成PWM输出,使用软件)。
具有非常低的预算(总体成本),和一个任务小组的雄心勃勃的学生(我)。
固件具有多个模块(测试模块,管理模块,通信模块,表达式模块,PWM模块)。
c#交互式用户友好的GUI工具,以加快后续项目&非常有助于展览。
面部皮肤是弹性多晶硅,伺服发动机可更换,尺寸:21.6 x 13.97 x 20.3厘米。
项目是在客户解决方案公司的CEO Josh grey的惊人帮助下创建的。
自行设计PC和微控制器之间的数据包协议(每包62字节,控制25个伺服发动机)
下面显示了在项目硬件上投入的大量工作
大厅地图/类别
大厅05
以前的
...科希策工业大学
以色列理工学院
德克萨斯大学阿灵顿分校…
下一个
以前的
下一个