视频
Loading the player ...
- Offer Profile
- The iCub is the humanoid robot developed at theIstituto Italiano di Tecnologia作为欧盟项目RobotCub的一部分,随后被全球20多个实验室通过。
由机器人技术,大脑和认知科学部运行。在Istituto Italiano di Tecnologia
Funded by the EU Commision under the Cognitive Systems and Robotics program
产品介绍
iCub

- The iCub is the humanoid robot developed at theIstituto Italiano di Tecnologia作为欧盟项目RobotCub的一部分,随后被全球20多个实验室通过。它有53个电动机,可移动头部,手臂和手,腰部和腿部。它可以看到和听到,它具有本体感受感(身体配置)和运动(使用加速度计和陀螺仪)。我们正在努力改进这一点,以使ICUB具有触摸感,并对其在环境中施加的力量进行评分。
认知类人动物实验室工作的科学家在机器人和神经科学研究的最前沿,在人形生物形状的机器人中实施了认知模型。这群异质的人旨在理解大脑功能并实现可以从错误中学习和适应的机器人控制器。
活动涵盖了我们称之为“ Bodyware”的硬件的构建,以及将有一天能够与人类相当的智能机器制造的软件。我们称这项技术为“思维软件”。在保镖方面,我们开发了ICUB,一种人形机器人,成形为4岁的孩子。同时,我们正在针对下一代机器人的技术开发,这些机器人基于柔软和适应性的材料,无论是用于传感和处理的材料。在思维软件方面,实验室参与了人类机器人的认知技能的实现。也就是说,为机器人提供视觉,听觉和触觉感知以及凝视,触及和操纵对象的能力。
-
-
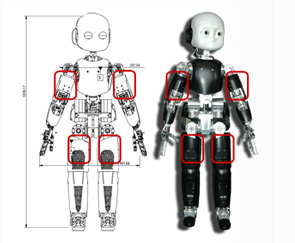
iCub 6-axial force/torque sensor
- iCub mounts four 6-axial force/torque sensors in the upper arms and legs. They have been designed to be compatible (in size) with the ATI Mini-45 sensors. The electronics have been miniaturized to fit inside the sensor which provides digital (CAN) output directly.
-
CFW-2,10端口罐头PC104卡
- This is a multi-port PC104+ card that hosts 10 CAN bus ports (managed by two microcontrollers), two Firewire ports and audio pre-amplifier. A large buffer (2Mbyte) is available for storing CAN messages and a DMA interface on the PCI bus is also provided.
-
ICUB控制器
- The iCub controllers are small microcontroller boards based on the Freescale 56F807 chip. Each card can connect via CAN bus to the host CPU (the PC104 card). They are of two different type controlling 4 brushed-dc motors (0.5A each) or 2 brushless-dc motors (48V, 6A continuous, 20A peak). The brushed version is complemented by a small power supply; the brushless version is made of two parts (one for the logic and the other for the amplifier).
-
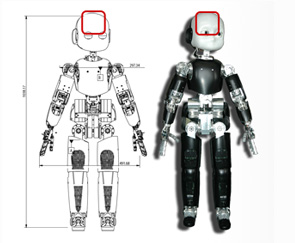
ICUB头1.1
- ICUB头有6度的自由度,并运动两个相机(Draginfly2),两个麦克风(带有特殊的针刺),陀螺仪和加速度计(MTX)。它还安装了带有足够端口的PC104双核机,可以控制整个机器人,读取数据并通过GBIT/S以太网端口发送它们。
-
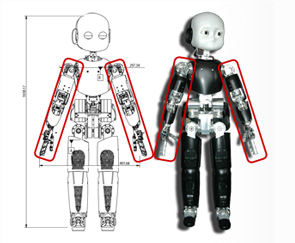
ICUB手臂和手
- The iCub arm and hand are anthropomorphic jointly sporting 16 degrees of freedom. 7 for the arm (including the wrist) and 9 in the hand. 8 degrees of freedom are allocated to the thumb, index and middle fingers thus enabling a fairly large degree of dexterity. The hand can be integrated with 108 tactile sensors in the fingertips and palm.
-
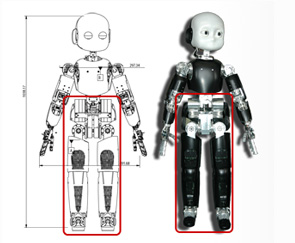
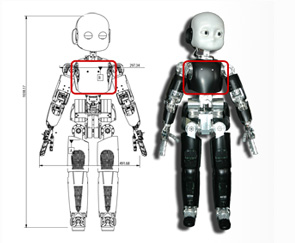
iCub腿和躯干
- The iCub legs and torso are jointly 15 degrees of freedom. They were designed mainly for crawling on all fours but tests have shown that bipedal walking is possible. Force/torque sensors are mounted in the upper part of each leg.
-

- 通过开发力量控制,正在将新生活注入ICUB平台。这项新技能使机器人与人类老师的安全轻柔互动。一个简短的视频显示了实验者使用的这一新功能,可以向全新的ICUB讲简单的动作。
-

- 由于诗欧盟项目,最近提高了ICUB抓握能力。通过使用诗意团队开发的口头语言工具,将诸如抓握之类的简单动作结合在一起。在此示例中,ICUB将谷物倒入杯子中。
-

- ICUB的新视觉技能。使用光流进行ICUB的独立运动跟踪。看看我们如何轻松地跟踪独立于ICUB的对象或人。
-

- The iCub met the Italian President in 2010 during a visit to Genoa and IIT. Here the President is asking about the robot after receiving the latest IIT leaflet from the hand of the iCub. Also in the picture, Giorgio Metta, Giulio Sandini and Roberto Cingolani.
-

- The iCub was in Hannover in April 2010 as part of the Italian delegation to the international fair and exhibit. Here's interacting with the German Chancellor Angela Merkel while showing its movement coordination skills and software reliability. The iCub ran uninterrupted for three full days attracting thousands of curious visitors
-
- 图片中的家伙洛伦佐(Lorenzo)正在进行操纵实验之前检查新的ICUB。ICUB在指尖和手掌中配备了电容性皮肤系统,可实现接触的测量和实施安全的抓握策略。
-

iCub皮肤和指尖
- ICUB可以以两种形式安装电容性皮肤系统:指尖和通用的身体皮肤。
皮肤基于模块化三角形结构,外部接线最小。
每个符号可以在50Hz(8bits)下进行采样,并通过CAN总线连接到CFW-PC104卡。
-

ikart
- This is a holonomic mobile base for the iCub which mounts six Swedish wheels, a high perf i7-CPU, it sports wireless connection and high perf Li-ion batteries. The iCub can stand on top of it and control the base using a standard interface.
-

iCub 2.0
- ICUB 2.0是我们的实验(正在进行的)新ICUB。ICUB已相对于扭矩测量(关节水平),张力传感器(肌腱),全身皮肤,指尖,新头部,所有无刷电动机上的其他高分辨率编码器,机械师和接线的许多小改进和新的脚部设计(用于双皮亚运动)
-
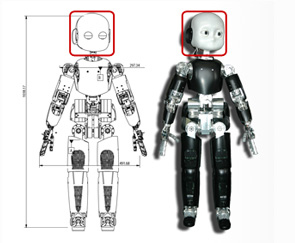
ICUB头2.0
- The new head (tentatively called 2.0) is at an advanced stage of design and prototypation. ´The neck has been redesigned for more torque and the eyes will mount zero-backlash harmonic drive gears. Further small modifications have been implemented especially to support accurate camera calibration.
项目
-

RobotCub
-
- RobotCub的目的是通过实施人形机器人的大小为3.5岁的孩子:ICUB来研究认知。这是一个完全开源和硬件项目,是一种!这是在硬件和软件中启动ICUB的项目。
-

Xperience
-
- Xperience will demonstrate that state-of-the-art enactive systems can be significantly extended by using structural bootstrapping to generate new knowledge. This process is founded on explorative knowledge acquisition, and subsequently validated through experience-based generalization.
-

EFAA
-
- 实验功能性的Android助手(EFAA)项目将通过在单一类似人类的社会能力和在一致的建筑中融合的整合中推进艺术的状态,从而为社会智能的类人动物的发展做出贡献。
-

Macsi
-
- MACSI项目是基于ICUB类人体机器人的开发机器人项目。从2010年到2012年,它被资助为ANR Blanc项目。
-

达尔文
-
- The Darwin project aims to develop an "acting, learning and reasoning" assembler robot that will ultimately be capable of assembling and disassembling complex objects from its constituent parts
-

ITALK
-
- ITALK项目旨在开发能够通过个人和社会学习获得复杂行为,认知和语言技能的人工具体代理。这将通过使用ICUB类人形机器人实验来实现。
-

诗意
-
- POETICON is a project that explores the poetics of everyday life, i.e. the synthesis of sensorimotor representations and natural language in everyday human interaction. This is related to an old problem in AI on how meaning emerges.
-

克里斯
-
- The CHRIS project (Cooperative Human Robot Interaction Systems) addresses the fundamental issues which enable safe Human Robot Interaction (HRI) from the motoric as well as cognitive point of view.
-

RobotDoc
-
- RobotDoc Collegium是一个跨国博士培训网络,用于发育认知机器人技术的跨学科培训。RobotDoc研究员将通过开源人类机器人ICUB进行实验,从而获得动手经验。
-

Roboskin
-
- RoboSKIN will develop and demonstrate a range of new robot capabilities based on the tactile feedback provided by a robotic skin from large areas of the robot body. Up to now, a principled investigation of these topics has been limited by the lack of tactile sensing technologies.
-

阿玛西
-
- 运动技能的人类ns and animals are still utterly astonishing when compared to robots. AMARSi aims at a qualitative jump in robotic motor skills towards biological richness.
-

我很聪明
-
- Im-Clever旨在开发一种新方法来设计机器人控制器,该方法可以通过基于内在动机来累积地学习新的高效技能,并重用此类技能,以完成多个,复杂和外部分配的任务。
-

eMorph
-
- Emorph项目的目的是使用模拟VLSI神经形态电路设计具有不均匀形态的异步视觉传感器,并为机器视觉开发支持数据驱动的异步计算范式。
-

ROSSI
-
- Starting from the assumption that cognition is embodied, the ROSSI project addresses the question of how the possibility of communication between agents (e.g. humans and robots) is affected by differences in sensorimotor capacities.































