- 提供配置文件
- T’不会是德甲卫冕冠军在机器人足球的挑战2 vs2, A和B,它们也在足球世界冠军2 vs2版本B竞争和最成功的德国“机器人世界杯赛初级”是个俗人的同龄组15到20。
产品组合
这个团队
- T’T Team由Jonas和Benno Timmermann兄弟组成,他们在Weißenhorn的Nikolaus-Kopernikus-Gymnasium上学。Jonas从2002年开始从事机器人研究。一年后,他的弟弟加入了他,并在2005年一起组建了足球队T’T。兄弟俩自己计划、建造和编程所有的机器人。他们的大部分知识都是通过互联网收集的,还有一些零部件和材料是由行业赞助的。2008年,他们成功构建了9个不同的机器人模型,这主要得益于年轻人的雄心壮志、密集的工作和慷慨的赞助商。
-
2010年德国公开赛在马格德堡举行
- T’T队-本诺(17岁,左)和乔纳斯·蒂默曼(19岁,右)
-

副世界冠军2010在滨海湾,新加坡
-

新晋的德国冠军2008年以230:38和109:14的比分进了球
“机器人足球世界杯”初级
- 青少年机器人世界杯是一项国际比赛,高中生们使用他们自己设计和编程的机器人在足球、救援和舞蹈三个领域进行竞争。
比赛分为两个年龄组;15岁以下和15到20岁之间。为了参加每年在汉诺威贸易博览会(Hannover Trade Fair)举行的德国锦标赛,一支球队必须参加三个地方锦标赛中的一个才能获得参赛资格。自从T 'T第一次参加2003年的世界锦标赛以来,比赛已经在意大利、葡萄牙、日本、德国、美国、中国、奥地利和新加坡举行。
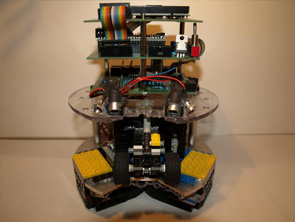
T'N'T Robots -原型2010
-
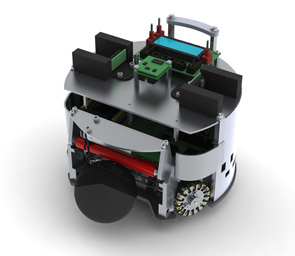
无袖长衫2010
-
- 控制器:由Arrow的EPC + STM32协处理器组成的Blackfin处理器模块
- 底盘:铝
- 驱动:3x 12W无刷电机
3x自主设计的Omniwheel
- 电源:1 × 148v锂电池
1x 7,4 V脂电池
- 球检测:16倍照片模块
7 x光电晶体管
- 墙&对手
- 识别:3x超声波测距仪
- 定位:1x罗盘传感器
1x鼠标传感器
1 x陀螺
- 踢:1倍螺线管
- 滴料机:1 × 6W电机
-
-
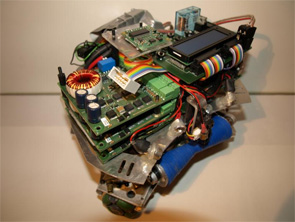
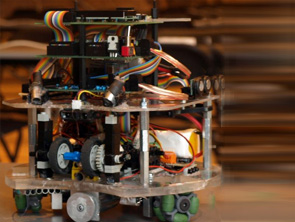
T'N'T Robots - 2009
-

无袖长衫2009
-
- 控制器:黑鳍处理器模块由箭头的EPC
- 底盘:铝
- 驱动:4x 6W电机
4 x Omniwheel
- 电源:1 × 148v锂电池
2x 7,4 V脂电池
- 球检测:70x光电晶体管
- 墙&对手
- 识别:4倍超声波测距仪
- 定位:1x罗盘传感器
1x鼠标传感器
- 踢:1倍螺线管
- 滴料机:1 × 6W电机
2x 0.5W电机
-
-
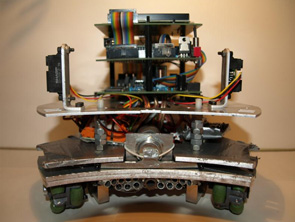
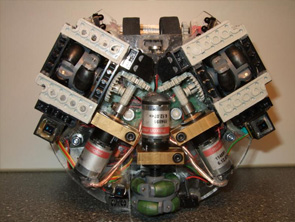
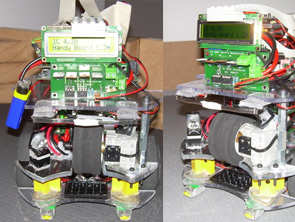
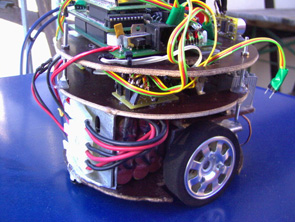
不是机器人- 2008 -中国苏州世界杯
-
苏州“2vs2”2008
-
- 控制器:AVR ATmega 2560
- 底盘:铝
- 驱动:
3x 12W电机
3 x Omniwheel
- 电力供应:
1x 14,8 v的锂电池
1x 7,4 V脂电池
- 球识别:58倍光电晶体管
- 墙和对手识别:
3x红外空间传感器
- 方向:
1倍罗经传感器
1个70元的地板传感器
- 踢腿:1x螺线管(提升磁铁)
- 运球前进的人:
1x 6W电机
1 ×双片
-
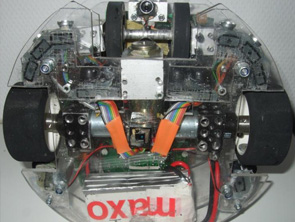
门将苏州2008
-
- 控制器:AVR ATmega 2560
- 底盘:铝
- 驱动:
3x 6W电机
3 x Omniwheel
- 电力供应:
1x 14,8 v的锂电池
1x 7,4 V脂电池
- 球识别:43倍光电晶体管
- 墙和对手识别:
3x红外空间传感器
- 方向:
1 x ompasssensor
1个70元的地板传感器
- 踢腿:1x螺线管(提升磁铁)
-

苏州“1vs1”2008
-
- 控制器:AVR ATmega 2560
- 底盘:铝
- 驱动:
3x 6W电机
3 x Omniwheel
- 电力供应:
1x 14,8 v的锂电池
1x 7,4 V脂电池
- 球识别:58倍光电晶体管
- 墙和对手识别:
3x红外空间传感器
- 方向:
1倍罗经传感器
1个70元的地板传感器
- 踢腿:1x螺线管(提升磁铁)
- 运球前进的人:
1x 6W电机
1 ×双片
T'N'T机器人- 2008 -德国公开赛汉诺威
-

2008年汉诺威
-
- 控制器:AVR ATmega 2560
- 底盘:铝/有机玻璃
- 驱动:
3x 6W电机
3 x Omniwheel
- 电力供应:
1x 14,8 v的锂电池
1x 7,4 V脂电池
- 球识别:45倍光电晶体管
- 墙和对手识别:
3x红外空间传感器
- 方向:
1倍罗经传感器
1个70元的地板传感器
- 踢腿:1x螺线管(提升磁铁)
- 运球前进的人:
1x 6W电机
2x Gummirad(乐高)
-

门将2008年汉诺威
-
- 控制器:AVR ATtmega 2560
- 底盘:铝/有机玻璃
- 驱动:
3x 6W电机
3 x Omniwheel
- 电力供应:
1x 14,8 v的锂电池
1x 7,4 V脂电池
- 球识别:52倍光电晶体管
- 墙和对手识别:
3x红外空间传感器
- 方向:
1倍罗经传感器
1个70元的地板传感器
-
2008年汉诺威
-
- 控制器:AVR ATmega 2560
- 底盘:铝/有机玻璃/乐高
- 驱动:
3x 6W电机
3 x Omniwheel
- 电力供应:
1x 14,8 v的锂电池
1x 7,4 V脂电池
- 球识别:33倍光电晶体管
- 墙和对手识别:
2倍红外空间传感器
- 方向:
罗盘传感器1个
3x CNY70地板传感器
- 运球前进的人:
1 x lego-motor
2x Gummirad(乐高)
T'N'T Robots - 2008 -南德国冠军赛Fürstenfeldbruck
-
fielder Fürstenfeldbruck 2008
-
- 控制器:AVR ATmega 2560
- 底盘:有机玻璃/乐高
- 驱动:
3x 6W电机
3 x Omniwheel
- 电力供应:
1x 14,8 v的锂电池
1x 7,4 V脂电池
- 球识别:41倍光电晶体管
- 墙和对手识别:
2倍超声波测距仪
- 方向:
1倍罗经传感器
2个70元的楼层传感器
- 踢腿:1x螺线管(提升磁铁)
- 运球前进的人:
1x 6W电机
2x Gummirad(乐高)
- 橡胶轮
-

守门员Fürstenfeldbruck 2008
-
- 控制器:AVR ATmega 2560
- 底盘:有机玻璃
- 驱动:
3x 6W电机
3 x Omniwheel
- 电力供应:
1x 14,8 v的锂电池
1x 7,4 V脂电池
- 球识别:52倍光电晶体管
- 墙和对手识别:
3x超声波测距仪
- 方向:
1倍罗经传感器
1个70元的地板传感器
-
1vs1 Fürstenfeldbruck 2008
-
- 控制器:AVR ATmega2560
- 底盘:丙烯酸玻璃/乐高
- 驱动:
3x 6W电机
3 x Omniwheel
- 电力供应:
1x 14,8 v脂电池
1x 7,4 V脂电池
- 球识别:33倍光电晶体管
- 墙和对手识别:
2倍超声波测距仪
- 方向:
1倍罗盘传感器
3x CNY70地板传感器
- 运球前进的人:
1x 6W电机
2个橡胶轮(乐高)
T'N'T not Robots - 2007
-
2007年,美国亚特兰大世界杯
-
2007年的今天,德国公开赛汉诺威
-

2007 - Süddeutsche冠军Vöhringen
-
2005年,日本大阪世界杯
-

2005年,德国公开赛帕德伯恩
























