类别
自动化
21日xx
会堂图/类别
大厅05
以前的
...FH法兰克福-社会工作和卫生
索尔福德大学
加州大学圣地亚哥分校…
下一个
以前的
下一个
导航:
EXPO21XX
>
自动化21 xx
>
H05:机器人大学和研究
索尔福德大学
索尔福德大学
概述
业务概况
详细联系方式
网站
发送电子邮件
分享:
视频
加载播放器…
提供配置文件
先进机器人研究中心是索尔福德大学计算、科学和工程学院的一部分。
该中心拥有由Samia Nefti博士领导的多学科小组
对人工认知系统和机器人及其组成技术感兴趣
.
产品组合
先进机器人研究实验室
该中心的活动起源于1987年,当时索尔福德大学被选为英国国家先进机器人研究中心的所在地。从那时起,机器人已经在大学和索尔福德的工程中形成了一个主要的战略方向,其中研究人员一直处于由贸易和工业部(DTI)、环境部、食品和农村事务(DEFRA)和工程和物理科学研究理事会(EPSRC)以及欧盟内部的国际发展。该中心目前在食品自动化和机器人领域主持着两个政府赞助的EPSRC网络。
先进机器人研究中心是索尔福德大学计算、科学和工程学院的一部分。该中心拥有由Samia Nefti博士领导的多学科小组,他们对人工认知系统和机器人技术及其组成技术感兴趣。该集团与工业和其他研究机构有着强大的国内和国际联系。实验室的核心研究人员包括十多名研究生,两名研究人员和三名兼职教师。该中心拥有学术(国内和国际)硕士课程,主要与电气工程系和计算机科学系有关。
认知与类人机器人
“认知机器人”一词是指具有更高层次认知功能的机器人,包括知识表示和推理。目前,该领域正在与来自欧洲机构(如意大利、热那亚和费拉拉的IIT)的心理学家和神经科学家合作开展几个项目。
我们的研究包括赋予机器人一些认知能力,如感知处理、注意力分配、预测、计划、对其他代理的推理,以及对自己的精神状态的推理。
在这一领域的实验室中进行的项目的例子有:关于群体智能的项目,称为非理性群体,它包括赋予群体的每个粒子一些非理性行为,以模仿人类的决策。开发的技术使用一些心理学原理来模拟人类的感知如何影响他们对给定选项的选择。
另一个项目提出了一种新的混合认知算法,将概率模糊控制器与强化学习结合在社会协作学习方案上。这个正在进行的项目的长期目标是使用这种混合算法和自组织粒子系统,使几个机器人代理能够结合他们获得的关于环境的知识来学习最佳行为,以完成给定的任务,同时处理现实世界环境的维度问题及其固有的不确定性。
另一个项目是研究认知机器人中的语言学习,并利用类人机器人iCub平台进行语言基础研究。我们的主要重点是研究语言和行动之间的关系。
博士生:Ahmed Al-Dulaimy, May Bunny, William Hinojosa, Indra Riadi
认知与类人机器人
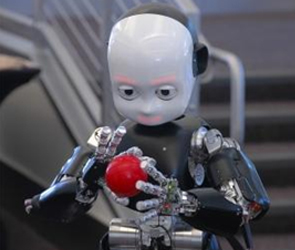
我们中心还积极参与了欧洲最先进的人形机器人的开发
RobotCUB
(
www.RobotCUB.org
).“iCub”是一个像孩子一样爬行的机器人,看起来像一个两岁半的孩子。该项目的最终目标是通过对认知发展的研究,为认知研究界提供一个开放式的类人平台,以理解认知系统。这项工作得到了欧盟委员会FP6项目IST-004370的支持。我们为这个欧洲项目提供的成果是机器人脊椎和腿部的机械、电子和控制系统的发展。完整的开发导致了许多出版物,在力学和控制系统的主题。
此外,我们的中心配备了NAO人形机器人(Aldebaran Robotics),用于研究和开发广泛的算法,从认知功能建模认知机器人到行走算法和视觉信号处理。
博士生:William Hinojosa
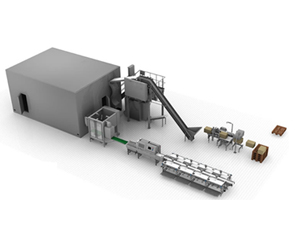
食品自动化
与工业应用机器人夹持器相比,设计用于处理食品的机器人夹持器时,必须考虑物体的非同质性、粘附性和粘弹性。因此,随着工业自动化需求的增加,研究适合不同食品单独处理的夹具正成为一个重要的设计目标。该部门的主要目标是为食品行业提供功能齐全、低成本和定制化的机器人和自动化解决方案,包括开发灵活、多功能的夹持器,可以处理卫生的拆包装食品;专门的夹持器,可以处理特殊形状的食物,如我们的千层面夹持器;宠物食品生产线的原型机设计。
硕士和博士学生:Xavier Sole, Rosidah Sam
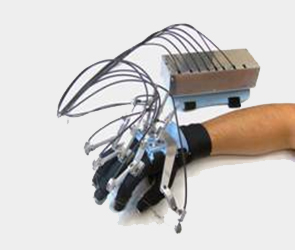
触觉
在过去的十年里,索尔福德大学一直是英国触觉界面研究的领导者。专注于触觉界面设计和实现的工作,特别是用于运动反馈的手和手臂外骨骼的设计,以及用于物体表面探索的手指触觉显示(触觉反馈)是我们许多研究项目的一些例子。其中一些项目还用于医务人员的康复和培训。
博士生:Ioannis Sarakoglou
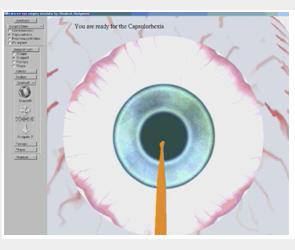
手术模拟器
另一个项目是开发交互式、负担得起、易于学习、无风险和可重复使用的医疗培训设备,如我们的白内障眼科手术模拟器(CESS)。这可以作为一种教学和培训方法,充分培训医学生,使他们能够学习和掌握对活体患者进行手术所需的技能。
博士生:Elmabruk Abulgasem
康复机器人
该领域涉及设计和开发“人类友好的”下半身和上半身外骨骼,用于行走步态辅助,中风患者的手臂康复和一般的人体力量增强。这些可穿戴设备中的许多都使用了编织式气动肌肉执行器(pma):一种新的、低质量、高功率的重量和体积驱动系统。
在过去的十年里,索尔福德机器人实验室一直领导着新型控制系统的研究和这些执行器的增强版本的开发。pma的优势在于,它们产生了一种类似肌肉的接触,利用其固有的性质,随着收缩而线性减弱,因此可以被认为是一种软的仿生驱动系统。这种“复制”天然肌肉功能和固有安全性的能力在与人类近距离工作时非常重要,特别是对那些患有残疾的人。
博士生:Nelson Costa, Sophia Kousidou, Ioannis Sarakoglou, William Hinojosa
Roboethics
索尔福德机器人实验室的这一领域主要研究与健康和社会护理机器人相关的伦理问题,以及将这些设备应用于未来社会的管理政策。我们正在特别研究技术人员、监管机构、经济代理人和最终用户之间的障碍。对机器人设计、生产和商业化过程中涉及的不同代理的权重进行多学科研究是加强经济循环的重要资产。很快,机器人和人类将共存,许多伦理方法是必要的,以使这一现实尽可能地最有利可图和舒适。
博士生:António Espingardeiro
移动机器人
在这个领域,我们处理移动机器人的机械和智能控制算法的设计。从所有地形机器人的设计,到使用最先进的技术设计和实现路径规划、障碍物躲避和紧急行为的AI算法,Khepera机器人(K-Team)用于测试我们的算法,以及广泛使用的模拟软件Webots (Cyberbotics)用于模拟和测试我们设计的机器人模型。
硕士研究生:Francesco Rea, Xavier Sole
会堂图/类别
大厅05
以前的
...FH法兰克福-社会工作和卫生
索尔福德大学
加州大学圣地亚哥分校…
下一个
以前的
下一个