- 提供配置文件
- Technosoft是领先的DSP运动控制技术公司专注于数字运动控制产品和定制运动系统-智能伺服驱动器和电机-基于MotionChipTM,一个运动控制专用DSP。
通过嵌入式智能和简单的高级软件可编程性,Technosoft数字伺服/步进驱动器和电机为医疗,工业,纺织到半导体工厂自动化等各种应用提供理想的解决方案。
产品组合
智能驱动

- Technosoft的iPOS智能驱动器系列基于一种新的设计理念,为旋转或线性无刷,直流刷和步进电机的位置,速度和扭矩控制提供了具有成本效益,紧凑,模块化的解决方案。iPOS智能驱动器旨在涵盖小容量和大容量应用,在一个模块中集成了所有基本的电机控制功能和运动控制功能。随着新iPOS智能驱动器家族的发展,Technosoft还扩展了分布式运动控制的概念。现在,您可以在iPOS驱动器和EtherCAT或CANopen主机之间拆分运动应用程序。使用TML (Technosoft的运动编程语言),您可以在每个驱动器上本地构建复杂的运动应用程序,只在EtherCAT或CANopen主机上留下高级别的运动应用程序,从而降低网络主机的复杂性。主机监督整个运动应用程序,而特定的任务由iPOS驱动器执行。
-
-

iPOS2401 MX-CAN 7-30V 0.9A 24W CANopen/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:7 ~ 30vdc / 7 ~ 40vdc
- 输出电流:0.9 A连续/峰值
- 通过RS232, TMLCAN和CANopen接口进行通信
- 模块化插件模块具有非常高的集成密度
- 用于焊接/插入间距为2毫米的引脚头
- 尺寸(长×宽×高):46.5 × 19.2 × 8.5毫米
产品特性
- 标准2毫米节距头配合连接器
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 多种操作模式:扭矩、速度或位置控制;位置或速度曲线;参考:外部模拟,或通过通信总线发送
- 用于定义和执行动作序列的TML指令集
- 独立操作与存储的运动序列
- 交流:
- rs - 232串行
- can总线2.0B高达1mbit /s,或CANopen
- 数字I/ o和模拟I/ o:
- 5个数字输入:5- 24v, NPN(使能,2个限位开关和2个通用输入)
- 2数字输出:5- 24v, 0.5 A, NPN开路集电极(通用)
- 1模拟输入:12位,0-5 V:参考或通用
- 支持的反馈设备:
- 增量四编码器(单端,开路集电极和差分)
- 使用EasyMotion Studio软件平台轻松配置和编程
- 过流、短路、接地故障、过/欠压、I2t、控制错误保护
-

iPOS2401 MX-CAT 7-30V 0.9A 24W EtherCAT
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:7 ~ 30vdc / 7 ~ 40vdc
- 输出电流:0.9 A连续/峰值
- 通过RS232或EtherCAT通信
- 模块化插件模块具有非常高的集成密度
- 用于焊接/插入间距为2毫米的引脚头
- 尺寸(长×宽×高):46.5 × 19.2 × 8.5毫米
产品特性
- can打开类似驱动器
- 标准2毫米节距头配合连接器
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 多种操作模式:扭矩、速度或位置控制;位置或速度曲线;参考:外部模拟,或通过通信总线发送
- 用于定义和执行动作序列的TML指令集
- 独立操作与存储的运动序列
- 交流:
- rs - 232串行
- EtherCAT通信周期降至900µs;基于EtherCAT的CAN应用协议(CoE)
- 数字I/ o和模拟I/ o:
- 5个数字输入:5- 24v, NPN(使能,2个限位开关和2个通用输入)
- 2数字输出:5- 24v, 0.5 A, NPN开路集电极(通用)
- 1模拟输入:12位,0-5 V:参考或通用
- 支持的反馈设备:
- 增量四编码器(单端,开路集电极和差分)
- 数字霍尔传感器
- 使用EasyMotion Studio软件平台轻松配置和编程
- 保护过温、过流、短路、接地故障、过/欠压、I2t、控制错误
-

iPOS3602 VX-CAN 9-36V 2A 75W CANopen/EtherCAT
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:9 / 36 VDC
- 输出电流:2a连续;3.2峰值电流
- 通过RS232, CAN/CANopen(标准)或EtherCAT(可选)进行通信
- 集成密度非常高的PCIe插件模块
- 在单轴或多轴主板上灵活集成
- 尺寸(长×宽×高):46.5 × 19.2 × 8.5毫米
产品特性
- 标准PCIe 4x匹配连接器
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 多种操作模式:扭矩、速度或位置控制;位置或速度曲线;参考:外部模拟,或通过通信总线发送
- 用于定义和执行动作序列的TML指令集
- 独立操作与存储的运动序列
- RS-232串行通信
- can总线2.0B高达1mbit /s,或CANopen
- 通过附加扩展模块进行EtherCAT通信(可选)
- 数字I/ o和模拟I/ o:
- 5个数字输入:5- 36v, NPN(使能,2个限位开关和2个通用开关)
- 4个数字输出:5- 36v, 0.5 A, NPN开路集电极(就绪,错误,2个通用输出)
- 2个模拟输入:12位,0-5 V:参考,反馈或通用
- 支持的反馈设备:
- 增量四编码器(单端,开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1vpp)
- 数字和线性霍尔传感器
- 使用EasyMotion Studio软件平台轻松配置和编程
- 过流、短路、接地故障、过/欠压、I2t、控制错误保护
-

iPOS3602 MX-CAN 9-36V 2A 75W CANopen/EtherCAT
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:9 / 36 VDC
- 输出电流:2a连续;3.2峰值电流
- 通过RS232, CAN/CANopen(标准)或EtherCAT(可选)进行通信
- 用于焊接/插入间距为2.54 mm的引脚头
- 尺寸(长×宽×高):55 × 26.4 × 13.1毫米
产品特性
- 标准对接连接器
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 多种操作模式:扭矩、速度或位置控制;位置或速度曲线;参考:外部模拟,或通过通信总线发送
- 用于定义和执行动作序列的TML指令集
- 独立操作与存储的运动序列
- 交流:
- rs - 232串行
- can总线2.0B高达1mbit /s,或CANopen
- EtherCAT通过额外的扩展模块(可选)
- 数字I/ o和模拟I/ o:
- 5个数字输入:5- 36v, NPN(使能,2个限位开关和2个通用开关)
- 4个数字输出:5- 36v, 0.5 A, NPN开路集电极(就绪,错误,2个通用输出)
- 1模拟输入:12位,0-5 V:参考或通用
- 支持的反馈设备:
- 增量四编码器(单端,开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1vpp)
- 数字和线性霍尔传感器
- 使用EasyMotion Studio软件平台轻松配置和编程
- 过流、短路、接地故障、过/欠压、I2t、控制错误保护
-

iPOS3602 BX-CAN 9-36V 2A 75W CANopen/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:9 / 36 VDC
- 输出电流:2a连续;3.2峰值电流
- 通过RS232, TMLCAN和CANopen接口进行通信
- 闭式框架设计,带有可伸缩连接器
- 尺寸(长×宽×高):80 × 55 × 16.3 mm
产品特性
- can总线2.0B高达1mbit /s,或CANopen
- 数字I/ o和模拟I/ o:
- 5个数字输入:5- 36v, NPN或PNP(使能,2个限位开关和2个通用开关)
- 3个数字输出:5- 36v, 0.5 A, NPN开路集电极(就绪,错误,2个通用输出)
- 1模拟输入:12位,0-5 V:参考,反馈或通用
- 支持的反馈设备:
- 增量四编码器(单端,开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1vpp)
- 数字和线性霍尔传感器
- 使用EasyMotion Studio软件平台轻松配置和编程
- 过流、短路、接地故障、过/欠压、I2t、控制错误保护
-

iPOS3602 HX-CAN 9-36V 2A 75W CANopen/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:9 / 36 VDC
- 输出电流:2a连续;3.2峰值电流
- 通过RS232, TMLCAN和CANopen接口进行通信
- 封闭框架设计,垂直可伸缩连接器
- 尺寸(长×宽×高):73 × 45 × 16mm
产品特性
- RS-232,波特率高达115200
- can总线,最高1mbit, TMLCAN或CANopen (CiA 301, 305和402)协议
- 数字I/ o和模拟I/ o:
- 5个数字输入:5- 36v, NPN/PNP可编程
- 4个数字输出:5- 36v, 0.5 A, NPN开路集电极
- 1模拟输入:12位,0-5 V
- 反馈设备:
- 增量四编码器,RS-422差分
- 正弦/余弦增量编码器,1 Vpp差分
- 数字霍尔传感器
- 过流、短路、接地故障、过/欠压、I2t、控制错误保护
-

iPOS3604 VX-CAN 9-36V 4A 144W CANopen/EtherCAT
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:9 / 36 VDC
- 输出电流:4a连续;10峰值电流
- 通过RS232, CAN/CANopen(标准)或EtherCAT(可选)进行通信
- 集成密度非常高的PCIe插件模块
- 在单轴或多轴主板上灵活集成
- 尺寸(长×宽×高):46.5 × 19.2 × 8.5毫米
产品特性
- 标准PCIe 4x匹配连接器
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 多种操作模式:扭矩、速度或位置控制;位置或速度曲线;参考:外部模拟,或通过通信总线发送
- 用于定义和执行动作序列的TML指令集
- 独立操作与存储的运动序列
- RS-232串行通信
- can总线2.0B高达1mbit /s,或CANopen
- 通过附加扩展模块进行EtherCAT通信(可选)
- 数字I/ o和模拟I/ o:
- 5个数字输入:5- 36v, NPN(使能,2个限位开关和2个通用开关)
- 4个数字输出:5- 36v, 0.5 A, NPN开路集电极(就绪,错误,2个通用输出)
- 2个模拟输入:12位,0-5 V:参考,反馈或通用
- 支持的反馈设备:
- 增量四编码器(单端,开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1vpp)
- 数字和线性霍尔传感器
- 使用EasyMotion Studio软件平台轻松配置和编程
- 过流、短路、接地故障、过/欠压、I2t、控制错误保护
-

iPOS3604 MX-CAN 9-36V 4A 144W CANopen/EtherCAT
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:9 / 36 VDC
- 输出电流:4a连续;10峰值电流
- 通过RS232, CAN/CANopen(标准)或EtherCAT(可选)进行通信
- 用于焊接/插入间距为2.54 mm的引脚头
- 尺寸(长×宽×高):55 × 26.4 × 13.1毫米
产品特性
- EtherCAT通过额外的扩展模块(可选)
- 数字I/ o和模拟I/ o:
- 5个数字输入,5- 36v, NPN:使能,2个限位开关,2个通用
- 4个数字输出,5-36V, 0.5A, NPN O.C:就绪,错误,2通用
- 1模拟输入:12位,0-5V:参考或一般用途
- 支持的反馈设备:
- 增量四编码器(单端,开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1vpp)
- 数字和线性霍尔传感器
- 使用EasyMotion Studio软件平台轻松配置和编程
- 过流、短路、接地故障、过/欠压、I2t、控制错误保护
-

iPOS3604 BX-CAN 9-36V 4A 144W CANopen/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:9 / 36 VDC
- 输出电流:4a连续;10峰值电流
- 通过RS232, TMLCAN和CANopen接口进行通信
- 闭式框架设计,带有可伸缩连接器
- 尺寸(长×宽×高):80 × 55 × 16.3 mm
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 多种操作模式:扭矩、速度或位置控制;位置或速度曲线;参考:外部模拟,或通过通信总线发送
- 用于定义和执行动作序列的TML指令集
- 独立操作与存储的运动序列
- RS-232串行通信
- can总线2.0B高达1mbit /s,或CANopen
- 数字I/ o和模拟I/ o:
- 5个数字输入,5- 36v, PNP或NPN:使能,2个限位开关,2个通用
- 3个数字输出,5- 36v, 0.5 A,1.7 A峰值,PNP:就绪,错误,通用
- 1模拟输入:12位,0-5 V:参考,反馈或一般用途
- 支持的反馈设备:
- 增量四编码器(单端,开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1vpp)
- 数字和线性霍尔传感器
- 使用EasyMotion Studio软件平台轻松配置和编程
- 过流、短路、接地故障、过/欠压、I2t、控制错误保护
-

iPOS3604 HX-CAN 9-36V 4A 144W CANopen/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:9 / 36 VDC
- 输出电流:4a连续;10峰值电流
- 通过RS232, TMLCAN和CANopen接口进行通信
- 封闭框架设计,垂直可伸缩连接器
- 尺寸(长×宽×高):73 × 45 × 16mm
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 位置,速度和扭矩控制
- 运动模式:位置和速度剖面;PVT和PT内插,电子传动和凸轮,外部参考:模拟或通过通信总线发送
- 通过TML或通过运动库进行运动编程
- 存储在驱动器存储器中的完整运动程序的独立操作
- 交流:
- RS-232,波特率高达115200
- can总线,最高1mbit, TMLCAN或CANopen (CiA 301, 305和402)协议
- 数字I/ o和模拟I/ o:
- 5个数字输入:5- 36v, NPN/PNP可编程
- 4个数字输出:5- 36v, 0.5 A, NPN开路集电极
- 1模拟输入:12位,0-5 V
- 反馈设备:
- 增量四编码器,RS-422差分
- 正弦/余弦增量编码器,1 Vpp差分
- 数字霍尔传感器
- 过流、短路、接地故障、过/欠压、I2t、控制错误保护
-

iPOS4808 VX-CAN 11-50V 8A 400W CANopen/EtherCAT
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:11 / 50 VDC / 12 / 36 VDC
- 输出电流:8a连续;峰值电流
- 通过RS232, CAN/CANopen(标准)或EtherCAT(可选)进行通信
- 开框PCB,垂直插件设计
- 尺寸(长×宽×高):56 × 44 × 6.9 mm
产品特性
- 标准PCIe 8x匹配连接器
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 多种操作模式:扭矩、速度或位置控制;位置或速度曲线;参考:外部模拟,或通过通信总线发送
- 用于定义和执行动作序列的TML指令集
- 独立操作与存储的运动序列
- RS-232串行通信
- can总线2.0B高达1mbit /s,或CANopen
- 通过附加扩展模块进行EtherCAT通信(可选)
- 数字I/ o和模拟I/ o:
- 8个数字输入:5- 36v, NPN(使能,2个限位开关和5个通用开关)
- 5个数字输出:5- 36v, 0.5 A, NPN开路集电极(就绪,错误,3个通用)
- 2个模拟输入:12位,0-5 V:参考,反馈或通用
- 支持的反馈设备:
- 增量四编码器(单端,开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1vpp)
- 数字和线性霍尔传感器
- 使用EasyMotion Studio软件平台轻松配置和编程
- 保护过流,短路,过/欠压,I2t,控制错误
-

iPOS4808 MY-CAN 11-50V 8A 400W CANopen/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:11 / 50 VDC / 12 / 36 VDC
- 输出电流:8a连续;峰值电流
- 通过RS232, TMLCAN和CANopen接口进行通信
- 用于焊接/插入网格尺寸为2.54 mm的引脚头
- 尺寸(长×宽×高):60 × 43.6 × 12.4 mm
产品特性
- 标准头2.54毫米间距连接器
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 多种操作模式:扭矩、速度或位置控制;位置或速度曲线;参考:外部模拟,或通过通信总线发送
- 用于定义和执行动作序列的TML指令集
- 通过不同的运动库(Linux, Delphi, Visual Basic, c++, LabView, Siemens, B & R, Omron)连接PC和PLC
- 独立操作与存储的运动序列
- RS-232串行通信
- can总线2.0B高达1mbit /s,或CANopen
- EtherCAT通信可用(有关- cat驱动器版本,请参阅“订购信息”)
- 数字I/ o和模拟I/ o:
- 6个数字输入:5- 36v(2个限位开关和4个通用开关)
- 5个数字输出:5- 36v, 0.5 A(就绪,错误,3个通用)
- 2个模拟输入:12位,0-5 V:参考,反馈或通用
- 安全:
- 驱动使能电路
- iPOS4808-CAN-STO和iPOS4808-CAT-STO版本:2个安全扭矩关闭输入,安全完整性级别(SIL3/Cat3/PLe)符合EN61800-5-1;-2/ EN61508-3;-4/ EN ISO 13849-1。
- 反馈装置(支持双回路):
- 1日反馈:
- 增量四编码器(单端,开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分:1 Vpp)
- 数字和线性霍尔传感器
- 2日反馈:
- 增量式四编码器(差分)
- 脉冲方向接口(差分)
- BiSS / SSI编码器接口
- 通过引脚配置127 h/w可选地址
- 使用EasyMotion Studio软件平台轻松配置和编程
- 保护过流,短路,过/欠压,I2t,控制错误
-

iPOS4808 MY-STO 11-50V 8A 400W CANopen/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:11 / 50 VDC / 12 / 36 VDC
- 输出电流:8a连续;峰值电流
- 通过RS232, TMLCAN和CANopen接口进行通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 用于焊接/插入网格尺寸为2.54 mm的引脚头
- 尺寸(长×宽×高):60 × 43.6 × 22毫米
产品特性
- 标准头2.54毫米间距连接器
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 多种操作模式:扭矩、速度或位置控制;位置或速度曲线;参考:外部模拟,或通过通信总线发送
- 用于定义和执行动作序列的TML指令集
- 通过不同的运动库(Linux, Delphi, Visual Basic, c++, LabView, Siemens, B & R, Omron)连接PC和PLC
- 独立操作与存储的运动序列
- RS-232串行通信
- can总线2.0B高达1mbit /s,或CANopen
- EtherCAT通信可用(有关- cat驱动器版本,请参阅“订购信息”)
- 数字I/ o和模拟I/ o:
- 6个数字输入:5- 36v(2个限位开关和4个通用开关)
- 5个数字输出:5- 36v, 0.5 A(就绪,错误,3个通用)
- 2个模拟输入:12位,0-5 V:参考,反馈或通用
- 安全:
- 驱动使能电路
- iPOS4808-CAN-STO和iPOS4808-CAT-STO版本:2个安全扭矩切断输入,
- 安全完整性等级(SIL3/Cat3/PLe)根据
- -2/ en61508-3;-4/ zh iso 13849-1。
- 反馈装置(支持双回路):
- 1日反馈:
- 增量四编码器(单端,开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分:1 Vpp)
- 数字和线性霍尔传感器
- 2日反馈:
- 增量式四编码器(差分)
- 脉冲方向接口(差分)
- BiSS / SSI编码器接口
- 通过引脚配置127 h/w可选地址
- 使用EasyMotion Studio软件平台轻松配置和编程
- 保护过流,短路,过/欠压,I2t,控制错误
-

iPOS4808 BX-CAN 11-50V 8A 400W CANopen/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:11 / 50 VDC / 12 / 36 VDC
- 输出电流:8a连续;峰值电流
- 通过RS232, TMLCAN和CANopen接口进行通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 带有可伸缩连接器的封闭框架设计
- 尺寸(长×宽×高):88.5 × 77 × 16.4毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 多种操作模式:扭矩、速度或位置控制;位置或速度曲线;循环同步定位方式;
- 参考:外部模拟,或通过通信总线发送
- 用于定义和执行动作序列的TML指令集
- 独立操作与存储的运动序列
- RS-232串行通信
- canbus 2.0B最高可达1mbit /s,或CANopen (CiA 301v4.2和402v3.0)协议
- 单独的使能电路(电路不活动时电机未通电)
- 数字I/ o和模拟I/ o:
- 6个数字输入:5- 36v, NPN或PNP(使能,2个限位开关和3个通用开关)
- 5个数字输出:5- 36v, 0.5 A, NPN开路集电极(就绪,错误,3个通用)
- 2个模拟输入:12位,0-5 V:参考,反馈或通用
- 反馈装置(双环支持):
- 1日反馈:
- 增量四编码器(单端,开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1vpp)
- 数字和线性霍尔传感器
- 二次反馈(双环)/数字参考:
- 增量式四编码器或脉冲方向(差分)
- SSI / bis *编码器接口
- 使用EasyMotion Studio软件平台轻松配置和编程
- 保护过流,短路,过/欠压,I2t,控制错误
-

iPOS4808 BX-CAT 11-50V 8A 400W EtherCAT
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:11 / 50 VDC / 12 / 36 VDC
- 输出电流:8a连续;峰值电流
- 通过RS232或EtherCAT通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 带有可伸缩连接器的封闭框架设计
- 尺寸(长×宽×高):88.5 × 77 × 16.4毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 多种操作模式:扭矩、速度或位置控制;位置或速度曲线;循环同步定位方式;
- 参考:外部模拟,或通过通信总线发送
- 用于定义和执行动作序列的TML指令集
- 独立操作与存储的运动序列
- RS-232串行通信
- EtherCAT:通信周期降至400µs;基于EtherCAT的CAN应用协议(CoE)
- 单独的使能电路(电路不活动时电机未通电)
- 数字I/ o和模拟I/ o:
- 6个数字输入:5- 36v, NPN或PNP(使能,2个限位开关和3个通用开关)
- 5个数字输出:5- 36v, 0.5 A, NPN开路集电极(就绪,错误,3个通用)
- 2个模拟输入:12位,0-5 V:参考,反馈或通用
- 反馈装置(双环支持):
- 1日反馈:
- 增量四编码器(单端,开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1vpp)
- 数字和线性霍尔传感器
- 二次反馈(双环)/数字参考:
- 增量式四编码器或脉冲方向(差分)
- SSI / bis *编码器接口
- 使用EasyMotion Studio软件平台轻松配置和编程
- 保护过流,短路,过/欠压,I2t,控制错误
-

iPOS4850 BX-CAN 11-60V 50A 2.5kW CANopen/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:11 / 60 VDC / 9 / 36 VDC
- 输出电流:50a连续;峰值电流
- 支持各种反馈选项,包括Sin / Cos和绝对编码器
- 通过RS232, TMLCAN和CANopen接口进行通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 闭式框架设计,带有可伸缩连接器
- 尺寸(长×宽×高):139 × 93.9 × 24.6毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 三相步进器的开环或闭环控制
- 位置,速度和扭矩控制
- 运动模式:位置和速度剖面;PVT和PT内插,电子传动和凸轮,外部参考:模拟或通过通信总线发送
- 通过TML (Technosoft Motion Language)或通过Windows (VC / VB / Labview)、Linux和各种PLC的运动库进行运动编程
- 独立操作的完整运动程序存储在驱动器存储器中
- 交流:
- RS-232,波特率高达115200
- CAN总线,高达1mbit,与TMLCAN或CANopen (CiA 301, 305和402)协议
- 数字I/ o和模拟I/ o:
- 2数字输入:7- 36v, PNP
- 2数字输出:5- 36v, 0.5 A, NPN开路集电极
- 3个模拟输入:12位,0- 5v
- 电机制动器螺线管驱动器,2A,由OUT0指挥
- 安全:
- 2个安全力矩切断输入,安全完整性等级(SIL3/Cat3/PLe)
- -2/ EN61508-3;-4/ EN ISO 13849-1
- 反馈装置(支持双回路):
- 1日反馈:
- 增量四编码器,RS-422差分
- 2日反馈:
- 增量四编码器,RS-422差分
- SSI,国际清算银行
- 脉冲和方向接口,RS-422差分
- 通过引脚配置32 h/w可选地址
- 使用EasyMotion Studio软件平台轻松配置和编程
- 保护:过流,短路,过温,接地故障,过/欠压,I2t,控制错误
-

iPOS8010 BX-CAN 11-80V 10A 800W CANopen/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:11 / 80 VDC / 9 / 36 VDC
- 输出电流:10a连续;峰值电流
- 支持各种反馈选项,包括Sin / Cos和绝对编码器
- 通过RS232, TMLCAN和CANopen接口进行通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 闭式框架设计,带有可伸缩连接器
- 尺寸(长x宽x高):139 x 94.2 x 24.5毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 位置,速度和扭矩控制
- 运动模式:位置和速度剖面;PVT和PT内插,电子传动和凸轮,外部参考:模拟或通过通信总线发送
- 通过TML (Technosoft Motion Language)或通过Windows (VC / VB / Labview)、Linux和各种PLC的运动库进行运动编程
- 独立操作的完整运动程序存储在驱动器存储器中
- 交流:
- RS-232,波特率高达115200
- CAN总线,高达1mbit,与TMLCAN或CANopen (CiA 301, 305和402)协议
- 数字I/ o和模拟I/ o:
- 4个数字输入:5- 36v, NPN/PNP可编程
- 4个数字输出:5- 36v, 0.5 A, NPN开路集电极
- 2个模拟输入:12位,0- 5v
- 安全:
- BA和BR版本:驱动使能电路
- BX版本:2个安全力矩切断输入,安全完整性等级(SIL3/Cat3/PLe)
- -2/ EN61508-3;-4/ EN ISO 13849-1。
- 反馈装置(支持双回路):
- 1日反馈:
- 增量四编码器,RS-422差分(BX和BA型号)
- 正弦/余弦增量编码器,1 Vpp差分(BX和BA型号)
- 数字霍尔传感器(BX和BA型号)
- 解析器(BR模型)
- 脉冲和方向接口,RS-422差分(BX和BA型号)
- 2日反馈:
- 增量四编码器,RS-422差分(所有型号)
- 正弦/余弦增量编码器,1vpp差分(BA模型)
- SSI、bis (BX、BA型号)
- EnDAT, Hiperface, Absolute A编码器(BA型)
- 脉冲和方向接口,RS-422差分(BX型)
- 通过引脚配置127 h/w可选地址
- 使用EasyMotion Studio软件平台轻松配置和编程
- 保护:过流,短路,接地故障,过/欠压,I2t,控制错误
-

iPOS8010 BX-CAT 11-80V 10A 800W EtherCAT
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:11 / 80 VDC / 9 / 36 VDC
- 输出电流:10a连续;峰值电流
- 支持各种反馈选项,包括Sin / Cos和绝对编码器
- 通过RS232或EtherCAT通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 闭式框架设计,带有可伸缩连接器
- 尺寸(长x宽x高):139 x 94.2 x 24.5毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 位置,速度和扭矩控制
- 运动模式:位置和速度剖面;PVT和PT内插,电子传动和凸轮,循环同步位置,速度和扭矩
- 通过TML (Technosoft Motion Language)进行运动编程
- 独立执行存储在驱动器存储器中的复杂运动函数
- 交流:
- RS-232,波特率高达115200,便于设置
- 带有CoE协议的EtherCAT
- 数字I/ o和模拟I/ o:
- 4个数字输入:5- 36v, NPN/PNP可编程
- 4个数字输出:5- 36v, 0.5 A, NPN开路集电极
- 2个模拟输入:12位,0- 5v
- 安全:
- BA和BR版本:驱动使能电路
- BX版本:2个安全力矩切断输入,安全完整性等级(SIL3/Cat3/PLe)
- -2/ EN61508-3;-4/ EN ISO 13849-1。
- 反馈装置(支持双回路):
- 1日反馈:
- 增量四编码器,RS-422差分(BX和BA型号)
- 正弦/余弦增量编码器,1 Vpp差分(BX和BA型号)
- 数字霍尔传感器(BX和BA型号)
- 解析器(BR模型)
- 脉冲和方向接口,RS-422差分(BX和BA型号)
- 2日反馈:
- 增量四编码器,RS-422差分(所有型号)
- 正弦/余弦增量编码器,1vpp差分(BA模型)
- SSI、bis (BX、BA型号)
- EnDAT, Hiperface, Absolute A编码器(BA型)
- 脉冲和方向接口,RS-422差分(BX型)
- 通过引脚配置127 h/w可选地址
- 使用EasyMotion Studio软件平台轻松配置和编程
- 保护:过流,短路,接地故障,过/欠压,I2t,控制错误
-

iPOS8020 BX-CAN 11-80V 20A 1.6kW CANopen/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:11 / 80 VDC / 9 / 36 VDC
- 输出电流:20a连续;峰值电流
- 支持各种反馈选项,包括Sin / Cos和绝对编码器
- 通过RS232, TMLCAN和CANopen接口进行通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 闭式框架设计,带有可伸缩连接器
- 尺寸(长x宽x高):139 x 94.2 x 24.5毫米
产品特性
- BA和BR版本:驱动使能电路
- BX版本:2个安全力矩切断输入,安全完整性等级(SIL3/Cat3/PLe)
- -2/ EN61508-3;-4/ EN ISO 13849-1。
- 反馈装置(支持双回路):
- 1日反馈:
- 增量四编码器,RS-422差分(BX和BA型号)
- 正弦/余弦增量编码器,1 Vpp差分(BX和BA型号)
- 数字霍尔传感器(BX和BA型号)
- 解析器(BR模型)
- 脉冲和方向接口,RS-422差分(BX和BA型号)
- 2日反馈:
- 增量四编码器,RS-422差分(所有型号)
- 正弦/余弦增量编码器,1vpp差分(BA模型)
- SSI、bis (BX、BA型号)
- 脉冲和方向接口,RS-422差分(BX型)
- 通过引脚配置127 h/w可选地址
- 使用EasyMotion Studio软件平台轻松配置和编程
- 保护:过流,短路,接地故障,过/欠压,I2t,控制错误
-

iPOS8020 BX-CAT 11-80V 20A 1.6kW EtherCAT
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:11 / 80 VDC / 9 / 36 VDC
- 输出电流:20a连续;峰值电流
- 支持各种反馈选项,包括Sin / Cos和绝对编码器
- 通过RS232或EtherCAT通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 闭式框架设计,带有可伸缩连接器
- 尺寸(长x宽x高):139 x 94.2 x 24.5毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 位置,速度和扭矩控制
- 运动模式:位置和速度剖面;PVT和PT内插,电子传动和凸轮,外部参考:模拟或通过通信总线发送
- 通过TML (Technosoft Motion Language)进行运动编程
- 交流:
- RS-232,波特率高达115200
- 带有CoE协议的EtherCAT
- 数字I/ o和模拟I/ o:
- 4个数字输入:5- 36v, NPN/PNP可编程
- 4个数字输出:5- 36v, 0.5 A, NPN开路集电极
- 2个模拟输入:12位,0- 5v
- 安全:
- BA和BR版本:驱动使能电路
- BX版本:2个安全力矩切断输入,安全完整性等级(SIL3/Cat3/PLe)
- -2/ EN61508-3;-4/ EN ISO 13849-1。
- 反馈装置(支持双回路):
- 1日反馈:
- 增量四编码器,RS-422差分(BX和BA型号)
- 正弦/余弦增量编码器,1 Vpp差分(BX和BA型号)
- 数字霍尔传感器(BX和BA型号)
- 解析器(BR模型)
- 脉冲和方向接口,RS-422差分(BX和BA型号)
- 2日反馈:
- 增量四编码器,RS-422差分(所有型号)
- 正弦/余弦增量编码器,1vpp差分(BA模型)
- SSI、bis (BX、BA型号)
- 脉冲和方向接口,RS-422差分(BX型)
- 通过引脚配置127 h/w可选地址
-

iMOTIONCUBE CAN 11-80V 20A 1.6kW CANopen/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:11 / 80 VDC / 9 / 36 VDC
- 输出电流:20a连续;峰值电流
- 支持各种反馈选项,包括Sin/Cos和绝对编码器
- 通过RS232, TMLCAN和CANopen接口进行通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 尺寸(长×宽×高):60 × 40 × 28.2毫米
产品特性
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 2相和3相步进的开环或闭环控制
- 位置,速度和扭矩控制
- 运动模式:位置和速度剖面;PVT和PT内插,电子传动和凸轮,外部参考:模拟或通过通信总线发送
- 通过TML (Technosoft Motion Language)或通过Windows (VC / VB / Labview)、Linux和各种PLC的运动库进行运动编程
- 存储在驱动器存储器中的完整运动程序的独立操作
- 交流:
- RS-232,波特率高达115200
- CAN总线,高达1Mbit,与TMLCAN或CANopen (CiA 301, 305和402)协议
- 数字I/ o和模拟I/ o:
- 4个数字输入:5- 36v, NPN/PNP可编程
- 4个数字输出:5- 36v, 0.5 A, NPN开路集电极
- 2个模拟输入:12位,0-5 V
- 安全:驱动使能电路
- 反馈装置(双环支持):
- 1日反馈:
- 增量四编码器(单端,开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1vpp)
- 数字和线性霍尔传感器
- 二次反馈(双环)/数字参考:
- 增量式四编码器或脉冲方向(差分)
- SSI / bis *编码器接口
- 保护:过流,短路,过/欠压,I2t,控制错误
-
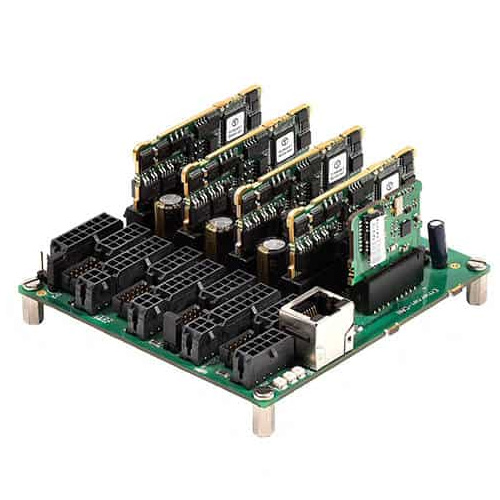
ipos360xsx多轴运动系统
-
-
- 运动系统与多达4 iPOS360x VX-CAN驱动器控制器
- 直流无刷,直流刷,步进,线性,音圈电机
- 电源电压:9-36 VDC;逻辑电压:7-36 VDC
- 高达4 A连续,每驱动器10 A峰值
- 轴间CAN通信
- RS-232和以太网设置
- 尺寸(长×宽×高):98 × 100.3 × 21.2 mm
产品特性
- 紧凑(100.3 x 98 x 37毫米),可用于多达4个轴的现成解决方案。
- 供电:电机/电源:+9至+36 Vdc;逻辑:+7到+36 Vdc
- 输出电流:
- iPOS3604: 4 A连续(无刷直流模式),每轴10 A峰值电流
- iPOS3602: 2 A连续(无刷直流模式),每轴3.2 A峰值电流
- 通信:can总线高达1mb /s, RS-232高达115k,以太网高达100mb /s
- can总线协议:CANopen (CiA301 v4.2, DSP305 v2.2, DSP402 v3.0)或Technosoft的TMLCAN,可通过跳线选择
- 交付选项:从一个到四个iPOS3602 VX或iPOS3604 VX智能伺服驱动器,每个提供:
- 旋转或线性无刷,直流有刷或步进电机的高性能控制
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 开环(最多512微步/步)或2相和闭环控制
- 三相步进
- 扭矩,速度或位置控制
- 反馈选项:增量单端或RS-422差分编码器,1 Vpp正弦/余弦编码器,数字或线性霍尔传感器
- 多种操作模式:位置或速度剖面(梯形或s曲线),内插(PT和PVT),外部(脉冲和方向,模拟),电子传动或凸轮(通过can总线发送主位置)
- 强大的TML指令集,用于定义/执行运动序列(TMLCAN协议)
- 具有存储运动序列的独立操作(TMLCAN协议)
- 5个数字输入,5- 36v(兼容NPN输出):使能,2个限位开关和2个通用开关
- 3个数字输出,5- 36v, 0.2 A:就绪,错误,1通用
- 2个模拟输入,12位,0-5 V:参考,反馈或通用
- 支持的反馈设备:
- 增量四编码器(单端,开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1vpp)
- 数字和线性霍尔传感器
- 使用EasyMotion Studio软件平台轻松配置和编程
- 过流、短路、接地故障、过/欠压、I2t、控制错误保护
-
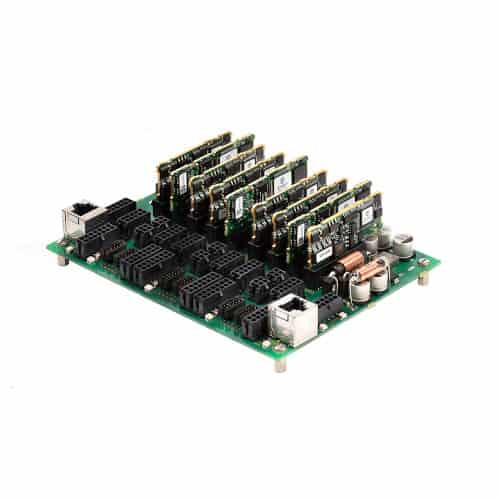
六轴运动系统CANopen/EtherCAT
-
-
- 运动系统与多达6 iPOS360x VX-CAN驱动器控制器
- 直流无刷,直流刷,步进,线性,音圈电机
- 电源电压:9-36 VDC;逻辑电压:7-36 VDC
- 高达4 A连续,每驱动器10 A峰值
- CAN/CANopen (CiA301, 305 & 402)或EtherCAT (CoE)
- RS-232和以太网设置
- 尺寸(长×宽×高):160 × 122 × 22毫米
产品特性
- 紧凑(160 x 122 x 37毫米),可用于多达6个轴的现成解决方案。
- 供电:电机/电源:+12至+36 Vdc;逻辑:+12到+36 Vdc
- 输出电流:
- iPOS3604: 4 A连续(无刷直流模式),每轴10 A峰值电流
- iPOS3602: 2 A连续(无刷直流模式),每轴3.2 A峰值电流
- 交流:
- 带CoE协议的EtherCAT (EtherCAT版本)
- CAN总线高达1mb /s (CAN版本),使用CANopen (CiA301, 305, 402)和Technosoft的TMLCAN协议,可通过跳线选择
- RS-232高达115k
- 交付选项:1至6个iPOS3602 VX或iPOS3604 VX智能伺服驱动器,每个驱动器提供:
- 旋转或线性无刷,直流有刷或步进电机的高性能控制
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 开环(最多256微步/步)或2相和3相步进器的闭环控制
- 扭矩,速度或位置控制
- 反馈选项:增量单端或RS-422差分编码器,1 Vpp正弦/余弦编码器,数字或线性霍尔传感器
- 多种操作模式:位置或速度剖面(梯形或s曲线),内插(PT和PVT),外部(脉冲和方向,模拟),电子传动或凸轮(通过CAN总线发送主位置)
- 强大的TML指令集,用于定义/执行运动序列(TMLCAN协议)
- 具有存储运动序列的独立操作(TMLCAN协议)
- 5个数字输入,5- 36v(兼容NPN输出):使能,2个限位开关和2个通用开关
- 3个数字输出,5- 36v, 0.2 A:就绪,错误,1通用
- 2个模拟输入,12位,0-5 V:参考,反馈或通用
- 支持的反馈设备:
- 增量四编码器(单端,开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1vpp)
- 数字和线性霍尔传感器
- 使用EasyMotion Studio软件平台轻松配置和编程
- 过流、短路、接地故障、过/欠压、I2t、控制错误保护
-

4轴运动系统
-
-
- 4轴运动系统采用iPOS4808 MY
- 适用于无刷、直流刷和步进电机
- 12- 50v电机电源,12- 36v逻辑电源
- 8 A连续,每轴20a峰值电流
- EtherCAT通信(CoE协议)
- RS-232设置
- 尺寸(长×宽×高):122.6 × 103.5 × 106.9 mm
产品特性
- 紧凑(100 x 124 x 92毫米),可用于多达4个轴的现成解决方案
- 1个电源连接器:电机/电源:+12至+50 Vdc;逻辑:+12到+36 Vdc
- 输出电流:连续8 A,每轴峰值电流20 A
- 通信:采用CoE协议的EtherCAT;RS232设置
- 基于最多4个iPOS4808 MY智能伺服驱动器,每个驱动器提供:
- 旋转或线性无刷,直流有刷或步进电机的高性能控制
- 无刷电机的正弦(FOC)或梯形(霍尔)控制
- 开环(最多512微步/步)或2相和3相步进的闭环控制
- 多种操作模式:扭矩、速度或位置控制;位置或速度曲线;循环同步定位方式;参考:外部模拟,或通过通信总线发送
- 用于定义/执行动作序列的TML指令集
- 独立操作与存储的运动序列
- 单独的使能电路(电路不活动时电机未通电)
- 数字I/ o和模拟I/ o:
- 6个数字输入,5- 36v, NPN或PNP(使能,2个限位开关和3个通用开关)
- 5个数字输出,5- 36v, 0.5 A, NPN开路集电极(就绪,误差,3个通用)
- 2个模拟输入,12位,0-5 V:参考,反馈或通用
- 反馈装置(双环支持):
- 1日反馈:
- 增量四编码器(单端,开路集电极和差分)
- 模拟正弦/余弦增量编码器(差分1vpp)
- 数字和线性霍尔传感器
- 二次反馈(双环)/数字参考:
- 增量式四编码器或脉冲方向(差分)
- SSI / bis *编码器接口
- 使用EasyMotion Studio软件平台轻松配置和编程
- 过流、短路、接地故障、过/欠压、I2t、控制错误保护
-

iPOS4808 MY-STO 11-50V 8A 400W EtherCAT
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:11 / 50 VDC / 12 / 36 VDC
- 输出电流:8a连续;峰值电流
- 通过RS232或EtherCAT通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 用于焊接/插入网格尺寸为2.54 mm的引脚头
- 尺寸(长×宽×高):64 × 43.6 × 22毫米
产品特性
电气特性:
- 电机供电/逻辑供电:11 / 50 VDC / 12 / 36 VDC
- 输出电流:8a连续,20a峰值电流
发动机类型:
- 无刷直流电机(BLDC, PMSM电机)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈执行器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器的非易失性存储器中的复杂运动序列。
-

iMOTIONCUBE CAT 11-80V 20A 1.6kW EtherCAT
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:11 / 80 VDC / 9 / 36 VDC
- 输出电流:20a连续;峰值电流
- 支持各种反馈选项,包括Sin/Cos和绝对编码器
- 通过RS232或EtherCAT通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 尺寸(长×宽×高):60 × 40 × 28.2毫米
产品特性
电气特性:
- 电机电源/逻辑电源:11 - 80 VDC / 9 - 36 VDC
- 输出电流:20a连续,40a峰值电流
发动机类型:
- 无刷直流电机(BLDC, PMSM电机)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈执行器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器的非易失性存储器中的复杂运动序列。
-

iGVD71 CAN-STO 11-80V 100A 8KW CANopen/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电/ STO供电:11—80 VDC / 9—36 VDC / 18—36 VDC
- 输出电流:100a连续;140a峰值电流
- 支持各种反馈选项,包括Sin / Cos和绝对编码器
- 通过RS232, TMLCAN和CANopen接口进行通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 闭式框架设计,带有可伸缩连接器
- 尺寸(长×宽×高):104.2 × 95 × 47.1 mm
产品特性
电气特性:
- 电机供电/逻辑供电/ STO供电:11 - 80 VDC / 9 - 36 VDC / 18 - 36 VDC
- 输出电流:100a连续,140a峰值电流
发动机类型:
- 无刷直流电机(BLDC, PMSM电机)
- 有刷直流电机(直流电动机)
- 音圈执行器
- 线性马达
控制:
- 通过CAN总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器的非易失性存储器中的复杂运动序列。
-

iPOS4810 MZ-CAN 11-50V 10A RMS 700W CAN/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电/ STO供电:11—50 VDC / 9—36 VDC / 18—40vdc
- 输出电流:10a RMS连续;28a RMS峰值电流
- 通过RS232, TMLCAN和CANopen接口进行通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 尺寸(长×宽×高):64 × 43.6 × 13.7毫米
产品特性
电气特性:
- 电机供电/逻辑供电/ STO供电:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:10a RMS连续,28a RMS峰值电流
发动机类型:
- 无刷直流电机(BLDC, PMSM电机)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈执行器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器的非易失性存储器中的复杂运动序列。
-
iPOS4810 MZ-CAT 11-50V 10A RMS 700W EtherCAT
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电/ STO供电:11—50 VDC / 9—36 VDC / 18—40vdc
- 输出电流:10a RMS连续;28a RMS峰值电流
- 通过RS232或EtherCAT通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 尺寸(长×宽×高):64 × 43.6 × 13.7毫米
产品特性
电气特性:
- 电机供电/逻辑供电/ STO供电:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:10a RMS连续;28a RMS峰值电流
发动机类型:
- 无刷直流电机(BLDC, PMSM电机)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈执行器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器的非易失性存储器中的复杂运动序列。
-

iPOS4810 XZ-CAN 11-50V 10A RMS 700W CAN/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电/ STO供电:11—50 VDC / 9—36 VDC / 18—40vdc
- 输出电流:10a RMS连续;28a RMS峰值电流
- 通过RS232, TMLCAN和CANopen接口进行通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 尺寸(长×宽×高):64 × 43.6 × 13.7毫米
产品特性
电气特性:
- 电机供电/逻辑供电/ STO供电:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:10a RMS连续,28a RMS峰值电流
发动机类型:
- 无刷直流电机(BLDC, PMSM电机)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈执行器
- 线性马达
控制:
- 通过CAN总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器的非易失性存储器中的复杂运动序列。
-

iPOS4810 XZ-CAT 11-50V 10A RMS 700W EtherCAT
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电/ STO供电:11—50 VDC / 9—36 VDC / 18—40vdc
- 输出电流:10a RMS连续;28a RMS峰值电流
- 通过RS232或EtherCAT通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 尺寸(长×宽×高):93 × 43.8 × 32mm
产品特性
电气特性:
- 电机供电/逻辑供电/ STO供电:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:10a RMS连续,28a RMS峰值电流
发动机类型:
- 无刷直流电机(BLDC, PMSM电机)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈执行器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器的非易失性存储器中的复杂运动序列。
-

iPOS4815 MZ-CAN 11-50V 15A RMS 1kW CAN/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电/ STO供电:11—50 VDC / 9—36 VDC / 18—40vdc
- 输出电流:15a RMS连续;28a RMS峰值电流
- 通过RS232, TMLCAN和CANopen接口进行通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 尺寸(长×宽×高):64 × 43.6 × 13.7毫米
产品特性
电气特性:
- 电机供电/逻辑供电/ STO供电:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:15a RMS连续,28a RMS峰值电流
发动机类型:
- 无刷直流电机(BLDC, PMSM电机)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈执行器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器的非易失性存储器中的复杂运动序列。
-
iPOS4815 MZ-CAT 11-50V 15A RMS 1kW EtherCAT
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电/ STO供电:11—50 VDC / 9—36 VDC / 18—40vdc
- 输出电流:15a RMS连续;28a RMS峰值电流
- 通过RS232或EtherCAT通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 尺寸(长×宽×高):64 × 43.6 × 13.7毫米
产品特性
电气特性:
- 电机供电/逻辑供电/ STO供电:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:15a RMS连续;28a RMS峰值电流
发动机类型:
- 无刷直流电机(BLDC, PMSM电机)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈执行器
- 线性马达
控制:
- 通过CAN总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器的非易失性存储器中的复杂运动序列。
-

iPOS4815 XZ-CAN 11-50V 15A RMS 1kW CAN/TMLCAN
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电/ STO供电:11—50 VDC / 9—36 VDC / 18—40vdc
- 输出电流:15a RMS连续;28a RMS峰值电流
- 通过RS232, TMLCAN和CANopen接口进行通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 尺寸(长×宽×高):64 × 43.6 × 13.7毫米
产品特性
电气特性:
- 电机供电/逻辑供电/ STO供电:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:15a RMS连续,28a RMS峰值电流
发动机类型:
- 无刷直流电机(BLDC, PMSM电机)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈执行器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器的非易失性存储器中的复杂运动序列。
-
iPOS4815 XZ-CAT 11-50V 15A RMS 1kW EtherCAT
-
-
- 智能,紧凑,可自由编程的电机控制器
- 适用于无刷、直流刷和步进电机
- 电机供电/逻辑供电:11 / 80 VDC / 9 / 36 VDC
- 输出电流:20a连续;峰值电流
- 支持各种反馈选项,包括Sin/Cos和绝对编码器
- 通过RS232或EtherCAT通信
- STO输入具有SIL3/Cat3/PLe安全完整性级别
- 尺寸(长×宽×高):60 × 40 × 28.2毫米
产品特性
电气特性:
- 电机供电/逻辑供电/ STO供电:11 - 50vdc / 9 - 36vdc / 18-40VDC
- 输出电流:15a RMS连续,28a RMS峰值电流
发动机类型:
- 无刷直流电机(BLDC, PMSM电机)
- 有刷直流电机(直流电动机)
- 步进电机(2相或3相)
- 音圈执行器
- 线性马达
控制:
- 通过EtherCAT总线,脉冲和方向或模拟/数字输入
- 自动执行存储在驱动器的非易失性存储器中的复杂运动序列。
智能汽车
- iMOT系列智能无刷电机和步进电机将智能驱动器、电机和位置传感器组合成一个单元。其结果是一种紧凑的经济有效的解决方案,将通过通信通道接收的运动命令转换为机械运动。
-
-

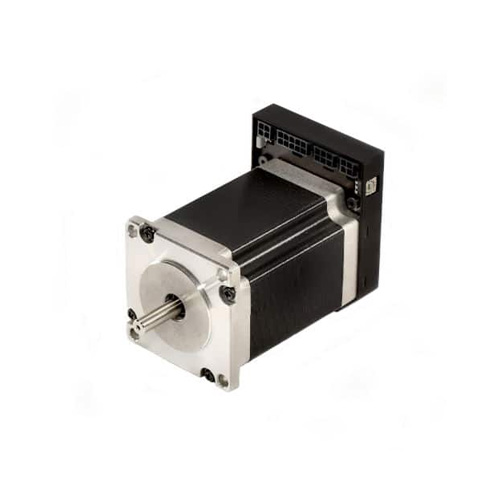
iMOT172S XM-CAN 12-48V 300mnm步进电机CANopen/TMLCAN
-
-
- 带有嵌入式驱动和运动控制器的步进电机
- 步进电机集成自由可编程伺服控制器
- 通过面向场控制(FOC)实现高动态和高效率
- 工作电压:12 = 48v /公称扭矩:300mnm
- 4096 I / rev.磁性单转绝对编码器(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:Molex Micro-Fit
产品特性
- 智能步进电机与嵌入式运动控制器,驱动器和位置反馈
- 性价比高的定位系统,由于紧凑和消除电机接线
- 连续扭矩:300mnm在高达1300 rpm
- 空载转速:1750rpm, 48v
- 运动模式:位置和速度剖面;PVT和PT内插,电子传动和凸轮,外部参考:模拟或通过通信总线发送
- TML (Technosoft Motion Language)运动编程,或使用PC或PLC的运动库
- 存储在驱动器存储器中的完整运动程序的独立操作
- 交流:
- RS-232高达115kbaud
- can总线高达1mbit,使用TMLCAN或CANopen (CiA301, 305和402)协议
- 数字I/ o和模拟I/ o:
- 5路数字输入:5- 36v
- 2数字输出:0-5 V;0.5
- 1模拟输入:12位分辨率,0-5 V
- 反馈装置:集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流,过温,短路,过压,欠压,I2t,控制错误
-

Imot17xs tm-can 300 MNM tm-can & canopen
-
-
- 带有嵌入式驱动和运动控制器的步进电机
- 步进电机集成自由可编程伺服控制器
- 通过面向场控制(FOC)实现高动态和高效率
- 工作电压:12 = 48v /公称扭矩:300mnm
- 4096 I / rev.磁性单转绝对编码器(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:M8 / M12
产品特性
- 智能步进电机与嵌入式运动控制器,驱动器和位置反馈
- 步进电机变成一个真正的伺服电机,由于FOC和无级技术由Technosoft
- 性价比高的定位系统,由于紧凑和消除电机接线
- 连续扭矩:300mnm在高达1300 rpm
- 空载转速:1750rpm, 48v
- 运动模式:位置和速度剖面;PVT和PT内插,电子传动和凸轮,外部参考:模拟,或通过通信总线发送
- TML (Technosoft Motion Language)运动编程,或使用PC或PLC的运动库
- 存储在驱动器存储器中的完整运动程序的独立操作
- 交流:
- RS-232高达115kbaud
- can总线高达1mbit,使用TMLCAN或CANopen (CiA301, 305和402)协议
- 数字I/ o和模拟I/ o:
- 4路数字输入:5- 36v
- 2数字输出:0-5 V;0.5
- 1模拟输入:12位分辨率,0-5 V
- 反馈装置:绝对单转集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流,过温,短路,过压,欠压,I2t,控制错误
-

iMOT172S TM-CAT 12-48V 300mnm步进电机EtherCAT
-
-
- 带有嵌入式驱动和运动控制器的步进电机
- 步进电机集成自由可编程伺服控制器
- 通过面向场控制(FOC)实现高动态和高效率
- 工作电压:12 = 48v /公称扭矩:300mnm
- 4096 I / rev.磁性单转绝对编码器(12位)
- 接口:EtherCAT、RS232
- 连接器系统:M8 / M12
产品特性
- 智能步进电机与嵌入式运动控制器,驱动器和位置反馈
- 步进电机变成一个真正的伺服电机,由于FOC和无级技术由Technosoft
- 性价比高的定位系统,由于紧凑和消除电机接线
- 连续扭矩:300mnm在高达1300 rpm
- 空载转速:1750rpm, 48v
- 运动模式:位置和速度剖面;PVT和PT内插,电子传动和凸轮,外部参考:模拟,或通过通信总线发送
- 通信:在EtherCAT (CoE)上使用CAN应用协议的EtherCAT
- 数字I/ o和模拟I/ o:
- 4路数字输入:5- 36v
- 2数字输出:0-5 V;0.5
- 1模拟输入:12位分辨率,0-5 V
- 反馈装置:绝对单转集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流,过温,短路,过压,欠压,I2t,控制错误
-

iMOT171B XM-CAN 12-48V 80mnm无刷电机CANopen/TMLCAN
-
-
- 带有嵌入式驱动和运动控制器的无刷电机
- 无刷电机与集成自由可编程伺服控制器
- 通过面向场控制(FOC)实现高动态和高效率
- 工作电压:12 = 48 V /公称扭矩:80 mNm
- 4096 I / rev.磁性单转绝对编码器(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:Molex Micro-Fit
产品特性
- 智能无刷伺服电机,具有嵌入式运动控制器,驱动和位置反馈
- 性价比高的定位系统,由于紧凑和消除电机接线
- 连续扭矩在3000转/分:100毫微米
- 运动模式:位置和速度剖面;PVT和PT内插,电子传动和凸轮,外部参考(模拟或通过通信总线发送)
- TML (Technosoft Motion Language)运动编程,或使用PC或PLC的运动库
- 存储在驱动器存储器中的完整运动程序的独立操作
- 交流:
- RS-232高达115kbaud
- can总线高达1Mbit,使用TMLCAN或CANopen (CiA301, 305和402)协议
- 数字I/ o和模拟I/ o:
- 5路数字输入:5- 36v
- 2数字输出:0-5 V;5 0,
- 1模拟输入:12位分辨率,0-5 V
- 反馈装置:集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流,短路,过压,欠压,I2t,控制错误
-

itmo17xb tm-can 100-300 MNM tm-can & canopen
-
-
- 带有嵌入式驱动和运动控制器的无刷电机
- 无刷电机与集成自由可编程伺服控制器
- 通过面向场控制(FOC)实现高动态和高效率
- 工作电压:12 = 48 V /公称扭矩:80 mNm
- 4096 I / rev.磁性单转绝对编码器(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:M8 / M12
产品特性
- 全数字智能无刷伺服电机,具有嵌入式运动控制器,驱动和位置反馈
- 性价比高的定位系统,由于紧凑和消除电机接线
- 连续扭矩在3000转/分:100毫微米
- 运动模式:位置和速度剖面;PVT和PT内插,电子传动和凸轮,外部参考:模拟或通过通信总线发送
- TML (Technosoft Motion Language)运动编程,或使用PC或PLC的运动库
- 存储在驱动器存储器中的完整运动程序的独立操作
- 通信:最高1mbit can总线,使用TMLCAN或CANopen (CiA301, 305和402)协议
- 数字I/ o和模拟I/ o:
- 4路数字输入:5- 36v
- 3个数字输出:0-5 V;0.5
- 1模拟输入:12位分辨率,0-5 V
- 用于can总线和I/ o的标准M8和M12连接器
- 反馈装置:集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流,短路,过压,欠压,I2t,控制错误
-

Imot17xb tm-cat 100-300 MNM ethercat
-
-
- 带有嵌入式驱动和运动控制器的无刷电机
- 无刷电机与集成自由可编程伺服控制器
- 通过面向场控制(FOC)实现高动态和高效率
- 工作电压:12 = 48 V /公称扭矩:80 mNm
- 4096 I / rev.磁性单转绝对编码器(12位)
- 接口:EtherCAT, RS232
- 连接器系统:M8 / M12
产品特性
- 全数字智能无刷伺服电机,具有嵌入式运动控制器,驱动和位置反馈
- 性价比高的定位系统,由于紧凑和消除电机接线
- 连续扭矩3000转/分:300毫微米
- 运动模式:位置和速度剖面;PVT和PT内插,电子传动和凸轮,外部参考:模拟或通过通信总线发送
- TML (Technosoft Motion Language)运动编程,或使用PC或PLC的运动库
- 存储在驱动器存储器中的完整运动程序的独立操作
- 通信:在EtherCAT (CoE)上使用CAN应用协议的EtherCAT
- 数字I/ o和模拟I/ o:
- 4路数字输入:5- 36v
- 3个数字输出:0-5 V;0.5
- 1模拟输入:12位分辨率,0-5 V
- 用于can总线和I/ o的标准M8和M12连接器
- 反馈装置:集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流,短路,过压,欠压,I2t,控制错误
-

iMOT232S XM-CAN 12-48V 1.0 Nm步进电机CANopen/TMLCAN
-
-
- 智能步进,NEMA 23
- 嵌入式驱动和运动控制器
- 连续扭矩:1.5 Nm
- 电机供电:12.5- 48v;逻辑电源:12.5-36 V
- 集成位置传感器:4096计数/转速
- 输入:5个数字,1个模拟。输出:2数字
- TMLCAN & CANopen communication
- 矩形连接器
产品特性
- 智能步进电机与嵌入式运动控制器,驱动器和位置反馈
- 性价比高的定位系统,由于紧凑和消除电机接线
- 连续扭矩:1.5 Nm
- 运动模式:位置和速度剖面;PVT和PT内插,电子传动和凸轮,外部参考:模拟或通过通信总线发送
- TML (Technosoft Motion Language)运动编程,或使用PC或PLC的运动库
- 存储在驱动器存储器中的完整运动程序的独立操作
- 交流:
- RS-232高达115kbaud
- 最高可达1mbit的can总线,使用TMLCAN或CANopen (CiA301和402)协议
- 数字I/ o和模拟I/ o:
- 5路数字输入:5- 36v
- 2数字输出:0-5 V;0.5
- 1模拟输入:12位分辨率,0-5 V
- 反馈装置:集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流,过温,短路,过压,欠压,I2t,控制错误
-

iMOT232S TM-CAN 12-48V 1.0 Nm步进电机CANopen/TMLCAN
-
-
- 智能步进,NEMA 23
- 嵌入式驱动和运动控制器
- 连续扭矩:1.5 Nm
- 电机供电:12.5- 48v;逻辑电源:12.5-36 V
- 集成位置传感器:4096计数/转速
- 输入:4个数字,1个模拟。输出:2数字
- TMLCAN & CANopen communication
- 圆形连接器,M8和M12
产品特性
- 智能步进电机与嵌入式运动控制器,驱动器和位置反馈
- 性价比高的定位系统,由于紧凑和消除电机接线
- 连续扭矩:1.5 Nm
- 运动模式:位置和速度剖面;PVT和PT内插,电子传动和凸轮,外部参考:模拟或通过通信总线发送
- TML (Technosoft Motion Language)运动编程,或使用PC或PLC的运动库
- 存储在驱动器存储器中的完整运动程序的独立操作
- 交流:
- RS-232高达115kbaud
- 最高可达1mbit的can总线,使用TMLCAN或CANopen (CiA301和402)协议
- 数字I/ o和模拟I/ o:
- 5路数字输入:5- 36v
- 2数字输出:0-5 V;0.5
- 1模拟输入:12位分辨率,0-5 V
- 反馈装置:集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流,过温,短路,过压,欠压,I2t,控制错误
-
Imot23xs tm-cat 1.0-1.5 nm ethercat
-
-
- 智能步进电机,NEMA 23
- 嵌入式驱动和运动控制器
- 连续扭矩:1.0mNm (iMOT232S)/ 1.5 nm (iMOT233S)
- 电机供电:12- 48v;逻辑电源:12- 36v
- 位置传感器:4096计数/转,绝对单转
- 输入:4个数字,1个模拟。输出:2数字
- 圆形M8和M12连接器
- 使用CoE协议进行EtherCAT通信
产品特性
- 智能步进电机与嵌入式运动控制器,驱动器和位置反馈
- 步进电机变成一个真正的伺服电机,由于FOC和无级技术由Technosoft
- 性价比高的定位系统,由于紧凑和消除电机接线
- 连续扭矩:1000和1600 mNm
- 空载转速:1400rpm和750rpm, 48v
- 运动模式:位置和速度剖面;PVT和PT内插,电子传动和凸轮,外部参考:模拟,或通过通信总线发送
- 通信:在EtherCAT (CoE)上使用CAN应用协议的EtherCAT
- 数字I/ o和模拟I/ o:
- 4个数字输入:5- 36v (PNP和NPN)
- 2数字输出:0-5 V;0.5 A (PNP和NPN)
- 1模拟输入:12位分辨率,0-5 V
- 反馈装置:绝对单转集成位置传感器提供4096计数/转的分辨率
- 可编程保护:过流,过温,短路,过压,欠压,I2t,控制错误
-

iMOT172B XM-CAN 12-48V 160mnm无刷电机CANopen/TMLCAN
-
-
- 带有嵌入式驱动和运动控制器的无刷电机
- 无刷电机集成自由可编程伺服控制器
- 通过面向场控制(FOC)实现高动态和高效率
- 工作电压:12 = 48 V /公称扭矩:160 mNm
- 4096 I / rev.磁单转绝对编码器(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:Molex Micro-Fit
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:3.1 A
- 公称扭矩:160 mNm @ 4000 rpm
交流:
- RS232 -高达115kbit /s
- CANopen -根据中情局301、305和402档案
- TMLCAN - Technosoft专有的CAN协议
数字和模拟输入/输出:
- 5个数字输入:5- 24v, NPN或PNP可配置
- 2个数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟输入:12位,0-5 V
-

iMOT172B TM-CAN 12-48V 160 mNm无刷电机CANopen/TMLCAN
-
-
- 带有嵌入式驱动和运动控制器的无刷电机
- 无刷电机与集成自由可编程伺服控制器
- 通过面向场控制(FOC)实现高动态和高效率
- 工作电压:12 = 48 V /公称扭矩:160 mNm
- 4096 I / rev.磁性单转绝对编码器(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:M8 / M12
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:3.1 A
- 公称扭矩:160 mNm @ 4000 rpm
交流:
- RS232 -高达115kbit /s
- CANopen -根据中情局301、305和402档案
- TMLCAN - Technosoft专有的CAN协议
数字和模拟输入/输出:
- 4个数字输入:5-24 V, NPN或PNP可配置
- 2个数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟输入:12位,0-5 V
-
iMOT172B TM-CAT 12-48V 160mnm无刷电机
-
-
- 带有嵌入式驱动和运动控制器的无刷电机
- 无刷电机集成自由可编程伺服控制器
- 通过面向场控制(FOC)实现高动态和高效率
- 工作电压:12 = 48 V /公称扭矩:160 mNm
- 4096 I / rev.磁单转绝对编码器(12位)
- 接口:EtherCAT, RS232
- 连接器系统:M8 / M12
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:3.1 A
- 公称扭矩:160 mNm @ 4000 rpm
交流:
- RS232 -高达115kbit /s
- EtherCAT -使用CANopen over EtherCAT (CoE)协议
数字和模拟输入/输出:
- 4个数字输入:5-24 V, NPN或PNP可配置
- 2个数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟输入:12位,0-5 V
-

iMOT173B XM-CAN 12-48V 240 mNm无刷电机CANopen/TMLCAN
-
-
- 带有嵌入式驱动和运动控制器的无刷电机
- 无刷电机集成自由可编程伺服控制器
- 通过面向场控制(FOC)实现高动态和高效率
- 工作电压:12 = 48 V /公称扭矩:160 mNm
- 4096 I / rev.磁单转绝对编码器(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:Molex Micro-Fit
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:3.1 A
- 公称扭矩:160 mNm @ 4000 rpm
交流:
- RS232 -高达115kbit /s
- CANopen -根据中情局301、305和402档案
- TMLCAN - Technosoft专有的CAN协议
数字和模拟输入/输出:
- 5个数字输入:5- 24v, NPN或PNP可配置
- 2个数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟输入:12位,0-5 V
-

iMOT173B TM-CAN 12-48V 240 mNm无刷电机CANopen/TMLCAN
-
-
- 带有嵌入式驱动和运动控制器的无刷电机
- 无刷电机与集成自由可编程伺服控制器
- 通过面向场控制(FOC)实现高动态和高效率
- 工作电压:12 = 48 V /公称扭矩:160 mNm
- 4096 I / rev.磁性单转绝对编码器(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:M8 / M12
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:3.6 A
- 公称扭矩:240 mNm @ 4000 rpm
交流:
- RS232 -高达115kbit /s
- CANopen -根据中情局301、305和402档案
- TMLCAN - Technosoft专有的CAN协议
数字和模拟输入/输出:
- 4个数字输入:5-24 V, NPN或PNP可配置
- 2个数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟输入:12位,0-5 V
-

iMOT173B TM-CAT 12-48V 240mnm无刷电机
-
-
- 带有嵌入式驱动和运动控制器的无刷电机
- 无刷电机集成自由可编程伺服控制器
- 通过面向场控制(FOC)实现高动态和高效率
- 工作电压:12 = 48 V /公称扭矩:160 mNm
- 4096 I / rev.磁单转绝对编码器(12位)
- 接口:EtherCAT, RS232
- 连接器系统:M8 / M12
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:3.1 A
- 公称扭矩:240 mNm @ 4000 rpm
交流:
- RS232 -高达115kbit /s
- EtherCAT -使用CANopen over EtherCAT (CoE)协议
数字和模拟输入/输出:
- 4个数字输入:5-24 V, NPN或PNP可配置
- 2个数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟输入:12位,0-5 V
-
iMOT233S XM-CAN 12-48V 1.6 Nm步进电机CANopen/TMLCAN
-
-
- 带有嵌入式驱动和运动控制器的步进电机
- 步进电机集成自由可编程伺服控制器
- 通过面向场控制(FOC)实现高动态和高效率
- 工作电压:12 / 48 V /公称扭矩:1.6 Nm
- 4096 I / rev.磁性单转绝对编码器(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:Molex Micro-Fit
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:2.8 A
- 公称扭矩:1.6 Nm @ 750 rpm
- 无负载速度:1400转@ 48 VDC
交流:
- RS232 -高达115kbit /s
- CANopen -根据中情局301、305和402档案
- TMLCAN - Technosoft专有的CAN协议
数字和模拟输入/输出:
- 5个数字输入:5- 24v, NPN或PNP可配置
- 2个数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟输入:12位,0-5 V
-

iMOT233S TM-CAN 12-48V 1.6 Nm步进电机CANopen/TMLCAN
-
-
- 带有嵌入式驱动和运动控制器的步进电机
- 步进电机集成自由可编程伺服控制器
- 通过面向场控制(FOC)实现高动态和高效率
- 工作电压:12 / 48 V /公称扭矩:1.6 Nm
- 4096 I / rev.磁性单转绝对编码器(12位)
- 接口:CANopen / TMLCAN, RS232
- 连接器系统:M8 / M12
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:2.8 A
- 公称扭矩:1.6 Nm @ 750 rpm
- 无负载速度:1400转@ 48 VDC
交流:
- RS232 -高达115kbit /s
- CANopen -根据中情局301、305和402档案
- TMLCAN - Technosoft专有的CAN协议
数字和模拟输入/输出:
- 4个数字输入:5-24 V, NPN或PNP可配置
- 2个数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟输入:12位,0-5 V
-

iMOT233S TM-CAT 12-48V 1.6 Nm步进电机
-
-
- 带有嵌入式驱动和运动控制器的步进电机
- 步进电机集成自由可编程伺服控制器
- 通过面向场控制(FOC)实现高动态和高效率
- 工作电压:12 / 48 V /公称扭矩:1.6 Nm
- 4096 I / rev.磁性单转绝对编码器(12位)
- 接口:EtherCAT, RS232
- 连接器系统:M8 / M12
产品特性
电气特性:
- 工作电压:12 - 48vdc /标称电流:2.8 A
- 公称扭矩:1.6 Nm @ 750 rpm
- 无负载速度:1400转@ 48 VDC
交流:
- RS232 -高达115kbit /s
- EtherCAT -使用CANopen over EtherCAT (CoE)协议
数字和模拟输入/输出:
- 4个数字输入:5-24 V, NPN或PNP可配置
- 2个数字输出:5- 24v, 0.5 A, NPN开路集电极
- 1模拟输入:12位,0-5 V
微型汽车

-
无槽无刷直流电机
- 与传统直流电动机相比,Technosoft无芯直流电动机具有高效率、低机械时间和极低惯性等主要优势。因为它的核心构造没有铁和质量低,它有能力加速和减速比任何其他直流电动机更快。没有铁消除齿槽和无芯电机平稳运行,即使在低速。我们为客户提供的优势之一是模块化,因为他们可以配备齿轮头,编码器和驱动器,为您的需求提供完整的解决方案。我们设法以较低的价格提供您想要的性能。电机规格,装配选项和配件可以在微型电机的完整目录中找到
- 平滑控制
- 小号(Ø8, Ø10, Ø13, Ø16, Ø17和Ø24 mm)
- 高扭矩
- 高速
- 模块化设计
- 无齿轮转矩
- 低体重
- 成本效益
-

TSU13026
-
- 无槽无刷直流电机,F13mm, 2.8mNm, 20000rpm
-

TSU13038
-
- 无槽无刷直流电机,F13mm, 5.5mNm, 20000rpm
-

TSU16036
-
- 无槽无刷直流电机,Ø16mm, 9.4mNm, 14000rpm
-

TSH16056
-
- 无槽无刷直流电动机,F16mm, 13.2mNm, 46000rpm
-

TSU22048
-
- 无槽无刷直流电动机,F22mm, 33.1mNm, 17000rpm
-

TSH22045
-
- 无槽无刷直流电机,F22mm, 21.2mNm, 37000rpm
-

TSH22060
-
- 无槽无刷直流电动机,F22mm, 33.8mNm, 36000rpm
无芯有刷直流电机
- 创新自主专利无铁电机绕组设计,体积小巧,功率高。无刷电机有两个版本,以满足广泛的应用要求:TSU版本专用于标准速度和扭矩应用,TSH型号已针对更高的速度进行了优化。此外,电机具有低噪声,低惯性和短响应时间,以满足任何动态应用。典型的无刷电机的定子是用槽构造的,定子绕组是围绕它们成型的,这项技术非常有名,随之而来的问题不容忽视。主要问题是齿槽扭矩,这是一个挑战,应用需要快速响应,快速加速,平稳操作。
- 无铁心的绕组
- 小号(Ø13、Ø16及Ø22 mm)
- 高扭矩
- 高速
- 模块化设计
- 使用寿命长
- 成本效益
- 沉默的操作
-

TCU08017
-
- 无芯有刷直流电机,Ø8mm, 0.6mNm, 5400rpm
-

TCU10017
-
- 无芯有刷直流电机,Ø10mm, 0.71mNm, 5000rpm
-
TCU10025
-
- 无芯有刷直流电机,Ø10mm, 1.63mNm, 6700rpm
-

TCU13020
-
- 无芯有刷直流电动机,Ø13mm, 1.83mNm, 8600rpm
-

TCU13028
-
- 无芯有刷直流电动机,Ø13mm, 3.48mNm, 7900rpm
-

TCU16025
-
- 无芯有刷直流电机,Ø16mm, 2.23mNm, 8100rpm
-

TCU17025
-
- 无芯有刷直流电机,Ø17mm, 3.89mNm, 8200rpm
-

TCU17035
-
- 无芯有刷直流电机,Ø17mm, 7.72mNm, 9000rpm
-

TCU24032
-
- 无芯有刷直流电机,Ø24mm, 10.92mNm, 8000rpm
行业
- iMOT系列智能无刷电机和步进电机将智能驱动器、电机和位置传感器组合成一个单元。其结果是一种紧凑的经济有效的解决方案,将通过通信通道接收的运动命令转换为机械运动。
-
-

医疗
-
- Technosoft定制运动解决方案的基准贡献是领先医疗应用的一部分,例如:
- 临床诊断
- 手术器械和机器人
- 离心泵
- x光设备
- 生物
- 眼科设备
当涉及到为医疗行业制造组件时,质量控制的制造过程是组件系列生产和使用的绝对要求。出于这个原因,我们的开发团队集中精力扩展过程监控系统。Technosoft通过了ISO 9001:2008认证。
-

仪器与光学
-
- Technosoft的自定义运动解决方案的基准贡献是领先仪器和光学应用的一部分,例如:
- 数码显微镜
- 激光测量系统
- 鸟瞰相机
- 光度法
- 镜头成型及抛光
- 自动对焦和自动缩放
-
机器人
-
- 机器人运动控制解决方案
- 机器人和合作机器人
- 外骨骼
- 叨纸牙
- 自动导引车辆(agv)
- 仓库自动化
-

实验室自动化
-
- 实验室自动化运动控制解决方案
-

工厂自动化
-
- 工厂自动化运动控制解决方案
- 挑选和放置机器人
- 笛卡儿的机器人
- 焊接机器人
- 印刷设备
- 焊接系统
- 激光打标
- 晶片检查
-
半导体设备
-
- 半导体设备运动控制解决方案
- 灵活的自动化
- 原子层蚀刻
- 装饰和形式
- 选择和放置处理程序
-

包装
-
- 针对包装市场的运动控制解决方案
-
工业设备
-
- 运动控制解决方案
- 电梯
- 电梯门
- 太阳能电池
- 液压泵
- 太阳能追踪器
- 光伏板
-

纺织
-
- 纺织运动控制解决方案











































































