- 提供配置文件
- 作为全球焊接技术的成员,igm robotersystem AG回顾了其作为焊接自动化领域领先公司50多年的历史。
自20世纪80年代以来,igm在传感器控制焊接和切割机器人系统的设计、制造和供应方面投入了丰富的经验。除了高效的整体解决方案,还完成了个别客户相关系统的开发。超过4000个机器人系统在全世界的工业部门中运行。作为全球焊接技术的成员,igm robotersystem AG回顾了其作为焊接自动化领域领先公司50多年的历史。自20世纪80年代以来,igm在传感器控制焊接和切割机器人系统的设计、制造和供应方面投入了丰富的经验。
除了高效的整体解决方案,还完成了个别客户相关系统的开发。超过4000个机器人系统在全世界的工业部门中运行。
产品组合
焊接机器人系统

-
-


机器人系列rte 400
-
- 超过40年的经验在焊接机器人的发展和生产工厂的规划出现在广泛的系统模块。主要模块为igm系列rte400机器人。
igm机器人的典型优点:
- 出色的编程技术与K6编程教学挂件和离线教学系统。
- 由于最佳的轴几何形状和安装在手腕轴上的焊枪,作为空心轴实现的,大的工作区域和完美的焊接访问到接缝位置。
- 所有的电缆都在机械臂内部使用空心轴。
RTE 400模块化机器人系统的特点是极其纤细的机械臂,优化了重量和刚度。对于轴2和轴4有不同的长度,可以为任何应用选择正确的移动范围。
高动态,免维护的交流伺服电机和突出的特点,刚性铸铝的联合结构保证了高转速和快速加速度在所有轴。电机装有制动装置,关机后不需要校准。驱动力由免维护的Cyclo变速箱传输。它们的使用不仅允许快速定位和高精度路径精度,而且还保持了使用的部件数量,因此需要更换的部件数量较低。
弧焊精度高
机器人是专门为电弧焊设计的:一个独特的特点是,所有焊接所需的介质都先通过主轴,然后通过空心轴进入腕轴,让焊枪完成两个完整的转弯。其结果是在接近紧密的工件和圆形接缝方面具有显著的优势。
完美的弧度意味着机器人与6、7或8个旋转轴在实心铝铸造结构中工作,垂直安装或悬挂位置。
轴的安排
在RTE机器人系统中,不仅机器人的驱动介质流经轴1,还包括焊接电流连接的冷却软管、气体软管、电缆导管软管、水冷电缆等焊接介质,以及送丝控制电缆。
为了使机器人和焊接设备在底座上保持苗条,送丝器集成到轴1中,并通过盖子保护免受环境影响。
还提供了一个附加轴,用于任何需要特殊运动范围的应用-旋转底座。这完全集成到机器人控制系统的运动链中,与轴1一起,允许极大扩展的运动范围。最大工作区半径为5200毫米,可根据需要通过外旋转和直线轴扩展。
Rte 400 -机器人类型:
- 六轴焊接机器人,RTE 456, 476, 496
- 七轴焊接机器人,RTE 477, 497
- 七轴焊接机器人,RTE 459, 479, 499
- 8轴焊接机器人,RTE 478, 498
多用途igm机器人
焊接,切割,斜角和更多-多任务的igm。
igm机器人可以做任何事情:除了焊接,他们还可以切割,斜角,移动,预热等。在这种情况下,只需要交换工具。一个真正的多任务机器人!
多用途应用示例
-


机器人控制rce + k6
-
- 控制系统的概念
控制系统为全数字控制系统。这意味着在整个控制系统中只有数字信号处理器(DSP),而没有任何模拟电子组件。控制系统的所有部件(如控制柜、焊接电源、各轴和教学挂件)由数字总线系统连接。
全数字机器人控制系统带来以下优点:
- 不受任何环境干扰的影响,如焊接电缆的感应场
- 最快的响应时间通过最快的总线连接>机器人的平稳运动
- 焊接结果绝对再现性>焊接质量一致性最高
- 整个机器人控制系统的诊断可能性小,无需专门的诊断仪器
通过使用模块化驱动技术和标准PC组件,高可靠性得到保证,并能够保持在技术的前沿。
由于使用的是标准PC组件,组件的诊断和交换也很容易由客户的工程师实现。
多达8个机器人轴和所有外部NC轴的完整控制系统包括在一个紧凑的控制柜中,通过电缆连接到机器人、教学吊杆、操作盒、外部轴和电源,电缆的两侧可插拔。
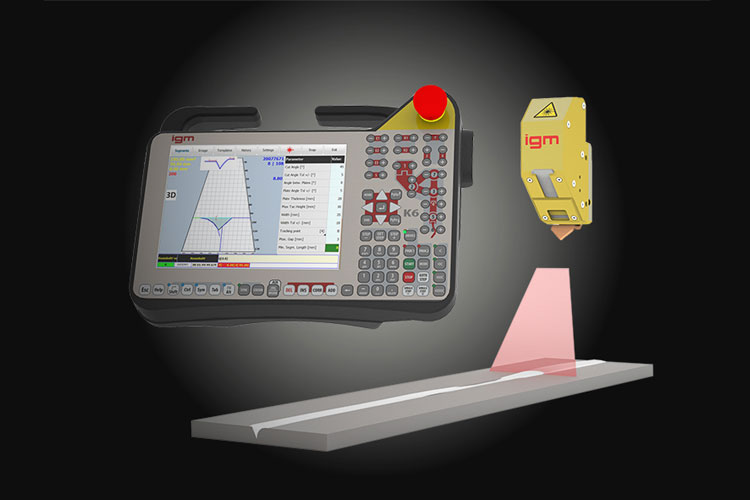
我教吊坠k6
作为RCE控制系统的关键部件,独特的教挂K6集合了RCE控制系统的所有控制功能。无需额外的键盘。
这款荣获工业设计大奖的轻量级教学吊坠由高耐塑料模具和顶部的嵌入式液晶触摸屏键盘面板制成。与触摸屏显示相比,感应按钮是可触摸的,使操作人员即使戴着工作手套也能触摸和感觉每个按钮。革命性的和广受欢迎的教学挂件的形状允许右手和左手操作,以及许多其他持有位置。
清晰和简单的显示每个轴的按钮,让操作员有一个独特的运动的每个轴,而不按错误的轴按钮我的错误。courser块在RCE软件菜单中提供了方便的导航,并取代了任何必要的鼠标。
控制PC采用嵌入式Windows 10操作系统和嵌入式Linux操作系统。与安全相关的过程数据的传输是通过EtherCAT的Saftey (FSoE)进行的。
k6教学挂件的特点
- 教学挂件与8.4“触摸屏
- 综合USB连接
- 多达32个插值轴和4个全局轴
- 嵌入式Windows 10和嵌入式Linux
- 引擎和DSL(编码器)连接,使用单根电缆
- 所有伺服在一个控制柜以太网(K6)和EtherCAT(驱动器和外围)
- iRIO igm机器人通过EtherCAT输入/输出板
- EtherCAT的安全性(FSoE)
-

igm焊接机器人软件产品
-
-
- Robonet:网络操作和远程访问
- 嵌入式ISDES:焊缝和作业数据采集系统
- Smartstep:生成机器人程序
- 机器人程序的操作和装配
- i4i:系统状态的可视化
ROBONET
igm软件用于网络操作和远程访问,从任意一台PC机对机器人进行控制
- 将数据传输到一台或多台机器
- 远程监控焊接和操作数据
- 教学挂件显示可以在您的笔记本或PC上查看
isd嵌入式
ISDES EMBEDDED是一种焊缝和操作数据采集系统,用于焊接过程的监测、文件记录和质量保证,以及部分或完全自动化焊接机器人系统的操作数据评估。集成在控制系统上的ISDES提供了记录、监测和评估对质量具有决定性作用的参数以及操作相关数据的可能性。
Isdes嵌入式函数
- 直接集成到控制器>参数化上的教挂
- 保存的iSDES数据可以在Excel中进一步处理
- 数据处理可由用户在PC机上进行
- 自动分配焊接数据到程序步骤
- 外部传感器集成到控制柜
SMARTSTEP
Smartstep是一款针对igm机器人控件的软件产品,它通过程序组装生成带有模板的交互式步进程序。
开发机器人程序的时间和成本是非常重要的,尤其是小批量。Smartstep为先前创建的程序部件的组装提供了一种简单的替代方法,这些程序部件已经准备好并保存在库中。它允许构建具有交互式输入窗口的可执行机器人程序。
Smartstep主要用于编程具有有限数量重复接缝的工件。
igm程序汇编工具
iPAT (igm程序汇编工具)是一个非常强大的工具,可以用于离线操作和汇编步骤程序(模板程序)。iPAT允许输入与工件长度和位置变化相关的数值。
iPAT的目标是将模板程序一个接一个地链接到一个目标程序。在此过程中,从模板程序中提取特定的步骤范围,将在机器人或轨道上移动,并通过一个简单的输入对话框一起复制到目标程序中。iPAT也可以用于单步程序内的轮班。
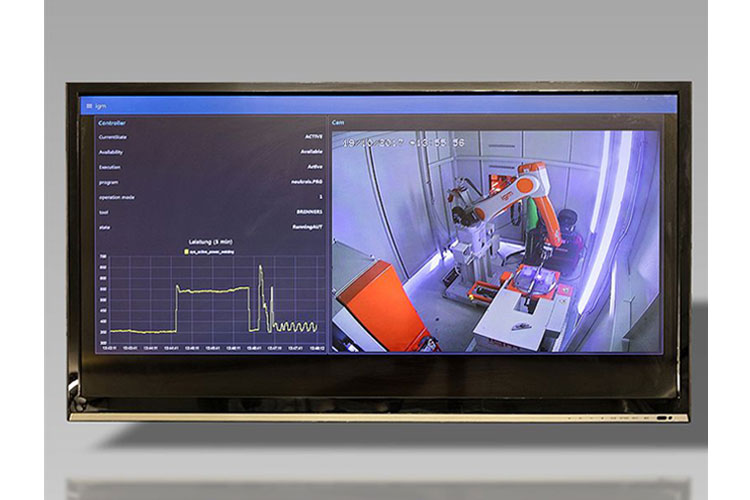
I4i可视化软件
I4i提供了机器人细胞状态的各种不同的可视化和报告。具有PLC接口,易于与机器连接。此外,它允许集成各种设备,如PC,平板电脑或智能手机。机器人各工位的实际运行时间和剩余运行时间以及当前程序的状态一目了然。
此外,每个机器人细胞的实时显示以及它们的状态报告都可以可视化。工件跟踪工具显示了工件的发展及其所有加工步骤,包括其应急策略。为了对制造过程进行结论性分析,SQL数据库提供了各种评价可能性。例如,可以计算出机器的可用性和它的出错概率,以及每班/一段时间的生产率。用户界面是在调试机器人单元时设置的,在保持所有标准功能的同时,可根据用户需求单独调整。
-
Igm焊接机器人离线编程系统
-
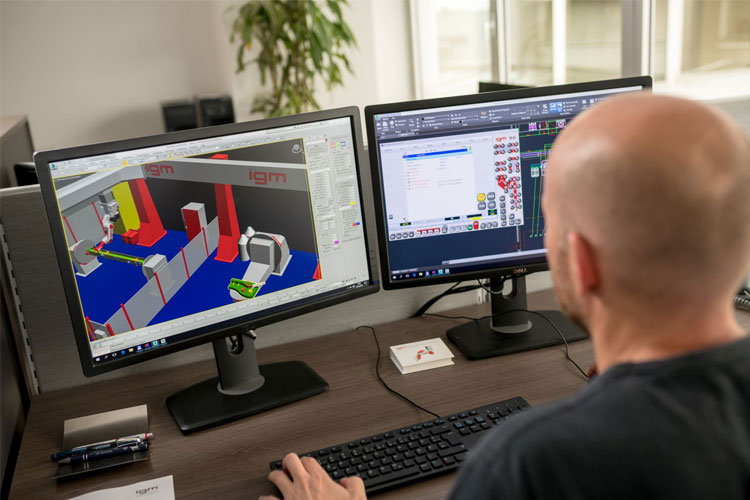
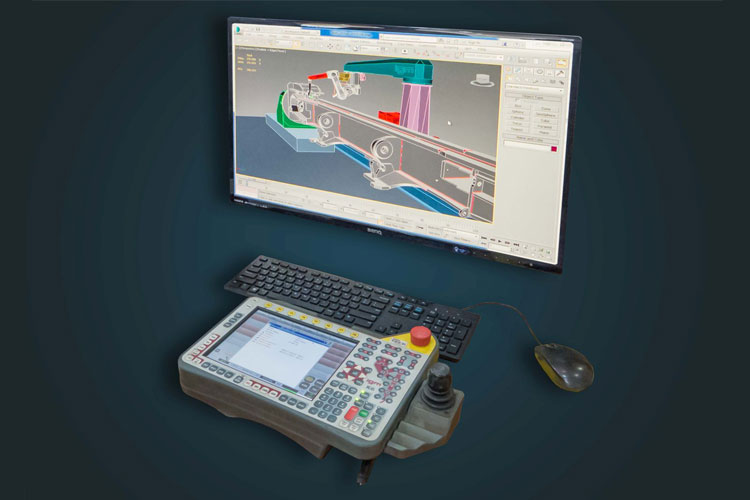
- 通过使用脱机系统生成机器人程序,提高了用于生产的机器人安装的操作可用性。在节省时间的同时,可以在办公环境中更方便地编写程序,并可以执行模拟测试运行(可访问性、周期时间的计算)。机器人与工件或夹具的碰撞可以在早期阶段检测到。
离线编程-在线工作
通过自主开发的基于pc机的离线编程系统,利用机器人控制系统的原始软件和教学挂件K6,实现了简单的机器人编程。
离线编程包括使用PC机和仿真软件在3D模式下面向工件的编程。首先将工件作为3D-CAD几何图形导入编程系统,然后确定机器人的运动轨迹。对于路径生成和加工参数的定义,有许多自动功能以及存储在控制系统中的数据库。
这是一个简单的系统,与在工厂为机器人系统编程的系统相同,但有一个显著的优势:当使用教吊杆K6时,所有的计算都使用相同的软件。这意味着机器参数或任何类型的机器人程序的转换都是不必要的。系统的所有程序更改都可以使用脱机系统进行处理,没有任何转换损失。
特殊功能:
- 接缝创建器-自动生成的焊缝,只需点击两个表面
- 中间点-为火炬平稳运动生成中间点
- 搜索驱动器-自动搜索驱动器生成中间慢跑运动
- iCAM离线-模板创建与虚拟相机
-




Igm传感器系统
-
- Igm气体喷嘴搜索-用于位置检测的触觉传感器
这种触觉传感器用于通过测量工件表面来确定工件的位置或其组件和个别零件。在每种情况下,程序的连续部分根据确定的偏差进行移位。
传感器移位可用于校正任意数量的单个点、焊接程序的整个部分或整个程序。与弧缝传感相结合是可行的。控制系统支持移动,旋转和倾斜的程序,取决于位置的变化。
气体喷嘴本身被用作传感器。这使得即使在复杂的工件和有限的空间中,也可以在工件的参考表面上执行所需的搜索步骤,通过这些步骤来确定焊缝的位置。一旦气体喷嘴接触到工件,它就被释放,机器人立即停止。此放电由控制柜中相应的传感器板在线记录,随后机器人移动到下一个搜索驱动器。
弧缝感应-圆角和v形缝的精密焊接
在焊接过程中,利用焊缝感知来补偿焊缝的位置误差。
通过专门的软件和专门设计的硬件,对实测数据进行处理,计算出圆角和v型接头的“实际”缝位,而弧线编织则使原始编程点向真实缝位发生相应的偏移。这种电弧焊缝传感技术可用于一系列完整的焊接转移,如短弧、喷雾弧和脉冲弧焊-使用单一或串联应用。然后焊枪精确地沿着接缝的路径移动。
该工艺与气嘴传感技术相结合是非常有利的。在那里,传感器检测到每个焊缝的起点,电弧在正确的位置被点燃,产生所需的突出。
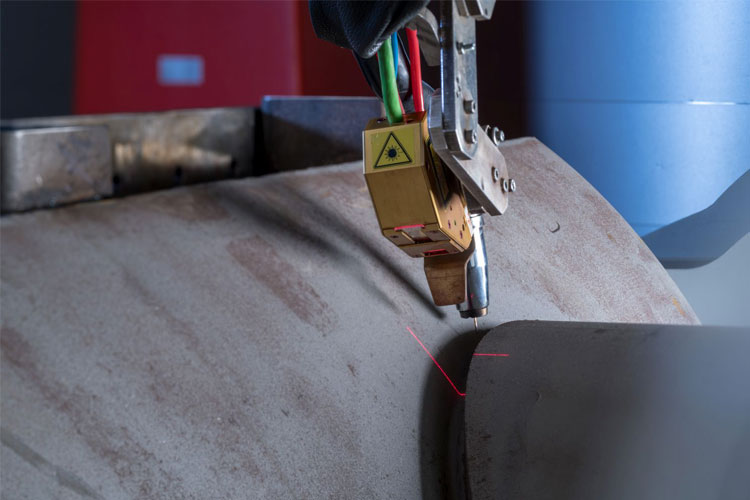
Igm激光相机icam
为了使机器人总是找到正确的方向,非常有效的,紧凑的激光相机被使用。它们被设计用于跟踪不同的焊缝类型,用于识别和测量检测到的间隙,并用于在线补偿体积变化。
该相机的设计基于同步激光扫描技术,具有高速稳定,大的可编程工作空间,深度视觉范围,对环境光和反射的鲁棒性。对高频和磁场的无钝化使它成为许多恶劣条件下工业过程的理想设备。
机器人的手腕轴上安装了igm激光相机iCAM。在线测量焊接坡口的位置和体积,并相应地调整机器人的运动和焊接参数。对于窄工件范围内的焊接应用,摄像机可以在焊接程序中自动沉积和重新使用。该激光相机iCAM,由igm开发,提供了一个突出的功能,完全集成到机器人控制。因此,编程是用igm teach吊坠K6完成的,而不需要额外的PC。用户受益于广泛的语言,欧洲和亚洲的,由机器人软件支持。通过测井函数,可以显示整个节理几何形状,显示间隙和体积。用灰度值图像给出了测量场的实时视图。
Igm激光传感器ils-c
igm激光传感器iLS-C在必须搜索边缘或间隙时非常有用。该传感器用于检测工件实际位置与其原始位置之间的偏差。移动计算并行以及3D模式,有效地补偿高度和宽度偏差。
与传统的触觉传感器相比,该激光传感器利用高搜索速度和在单一搜索路径中同时检测高度和横向位置,从根本上减少了非生产时间。精心设计的teach pendant支持简单的编程;不要求具备处理算法方面的特殊知识。
当由于薄片厚度和/或可及性而无法进行触觉感知时,通常应应用iLS-C。
通过移动传感器和机器人火炬穿过要搜索的缝来开始检测。总是执行整个搜索序列,然后对图像进行分析。因此,诸如峰值、畸形值(镜像效应)或寄生物体(飞溅形成和碎片)等干扰可以被识别和过滤掉。要搜索的接缝类型必须分配到搜索序列中。传感器根据一定的机器人参数计算出被测点的绝对位置,并将数据传输给机器人控制系统。
-



机器人/工件周边和入口系统
-
- Igm机器人外围
该机器人以垂直或悬浮的位置安装在机器人外围。轨迹系统的外轴作为数控轴完全集成在控制系统中,大大扩展了机器人的工作区域。
各种不同的旋转和线性单元可供选择,或作为单轴或结合多达三个定位单元。也有可能几个机器人共享一个轨道轴。纵轴定位范围可达100米以上。
Igm工件周边
工件周边固定、定位和移动工件。外部轴作为数控轴完全集成在控制系统中,此外,具有手动控制功能。在焊接步骤的执行过程中,外部轴可以包括在工件操作中。使用teach pendant,它们与机器人轴一起被编程。
各种不同的旋转模块可供选择,作为一个单轴或结合多达三个轴,负载能力高达25.000公斤和更多。
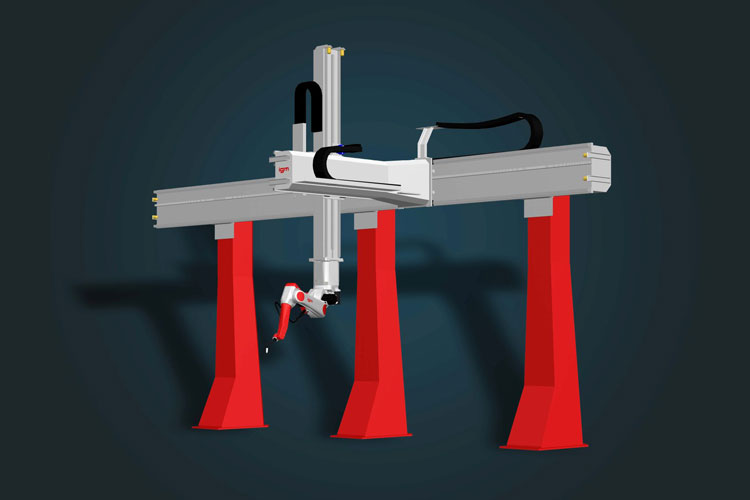
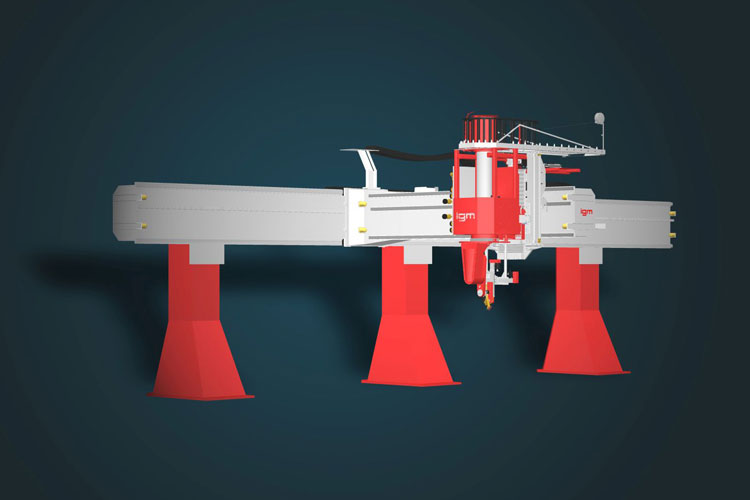
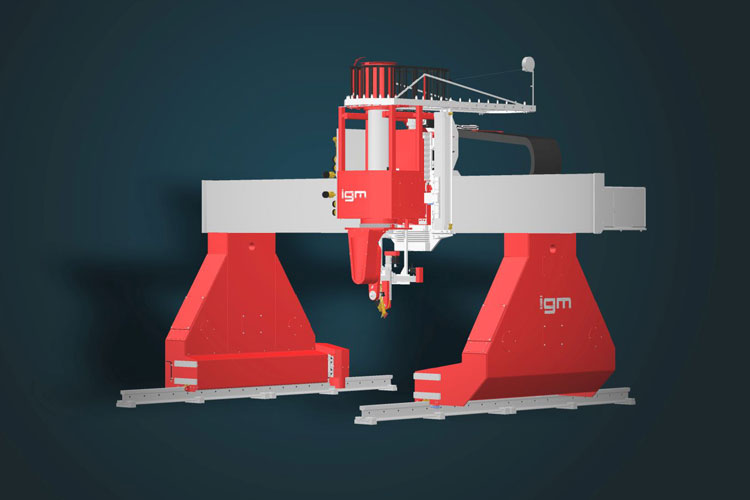
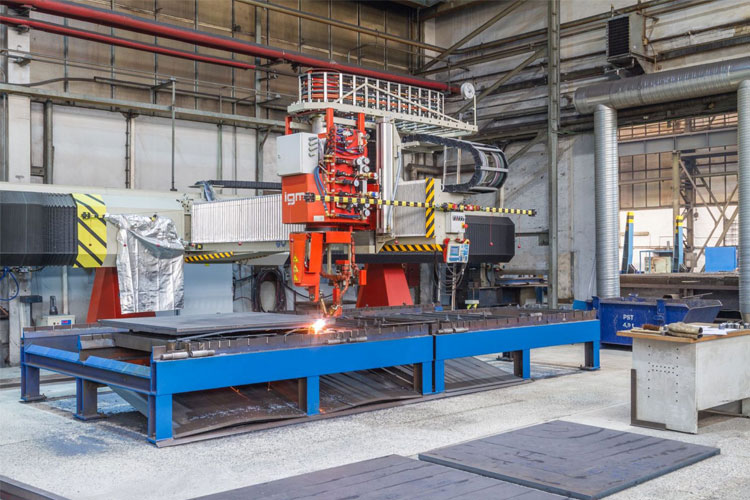
Igm门户系统
Igm为焊接大型部件提供门户龙门系统,为个人应用定制。门式龙门系统的轨距范围从3到25米,垂直轨道的行程可达6米。
一个或两个机器人可以安装在一个传送门上;由于传送门轴由机器人控制系统控制,它也可用于焊接步骤执行期间的定位。
标准的门户设计包括一个带有交流伺服电机的双边机架驱动,稳定的轮室与集成的边缘导向控制在巨大的轨道,移动控制柜,电源,和一个控制台,如果要求。
-




Igm紧凑系统
-
- igm紧凑型系统在所有机械方面以及控制硬件和软件方面都针对弧焊应用进行了优化。在这种工件和机器人外围设备的组合中,整个系统保持紧凑,因为机器人只需通过旋转臂旋转来改变工作站,或者在其他配置中,工作台的旋转由转盘执行。
驱动是轴控制的,由一个交流伺服电机提供一个特殊的齿轮箱和内置的数字编码器。车削夹具非常适合作为一个外部机器人轴使用。工件的运动完全集成在机器人控制系统中,并允许在焊接过程中工件的同步运动。通过teach吊坠K6进行简单的编程。所有必要的手动和自动操作控制组件集成在系统中。
igm紧凑系统和完整焊接单元的例子
- igm紧凑型系统,RSX型501,502,1001,1002
- igm紧凑型系统,RRMK 602、1002型
- igm紧凑型系统,RRMK/RP2 1002型
- igm焊接电池,P2W-10型
- igm焊接电池,P2W-20型
-

Igm完整系统-生产线
-
- FMS -灵活的制造系统-由igm为您的目的定制
对于特殊的应用,igm生产定制的焊接系统,满足您的个人需求。成功安装的应用范围从气瓶机,柔性制造单元到完整的生产线。
定制机器人系统:
在这些灵活的系统中,需要的不仅仅是焊接技术:加载、输送、拉伸、弯曲、切割、测量、操作、编辑、存储、卸载和控制。
复杂的制造任务需要灵活的解决方案。多年来,igm在各种零件的全自动生产线的工程和实现方面具有丰富的经验。对于额外的生产要求,我们提供处理设备,我们开发特殊用途的机器,并作为主承包商照顾您的整个项目,从订单下达到最终调试。
柔性生产线的基本概念:
- 单工件类型和单机器人单元的FMS
- FMS适用于多个工件类型和单个机器人单元
- FMS适用于单一工件类型和多个机器人单元
- FMS适用于几种工件类型和几种机器人单元
生产线组成
- 装卸站
- 辊道输送机
- 输送机运输
- 缓冲站
- 存储的地方
- 线路控制
整个生产线包括机器人单元都由一台主机控制。图形信息的显示,使操作和监控方便。
完全不同形状和尺寸的工件由专门设计的托盘处理。这些托盘的内侧被设计用来夹紧零件,而垂直的外侧代表定位器面板上的专利夹紧装置。内置传感器监测正确的夹紧。
带有卫星支架和剪刀台的传送带将零件运送到机器人站,在那里它们被自动夹紧。在每个进料站,主输送带都是气动指示的,目的是确保与卫星车厢轨道的正确位置。
-

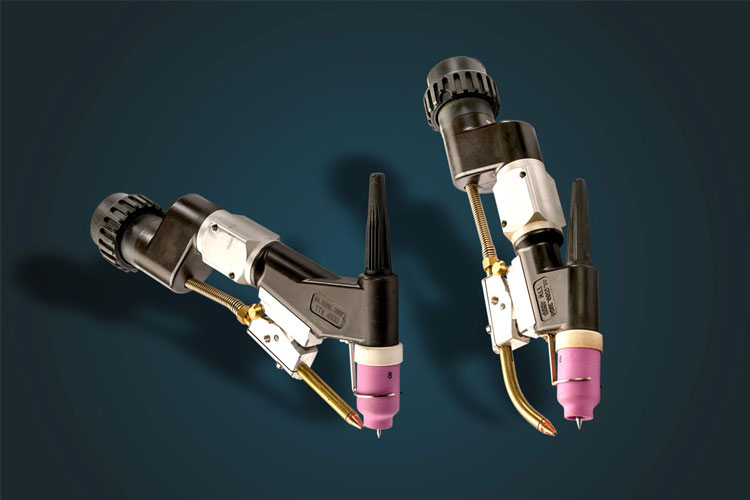


Igm焊枪及焊枪交换系统
-
- 这种焊枪是为在恶劣条件下进行高性能焊接的机器人而设计的。纤细的设计,加上天鹅脖子的形状,即使在工件狭窄的部分,也允许最好的访问性。所有作为igm机器人标准提供的焊枪都具有特别稳定的设计,具有密集的水冷却和快速释放耦合。它们也配置为气动火炬与压缩空气清洗至少7巴,并使用气体喷嘴作为程序转换的触觉传感器。
接触管与焊枪曲率相连接的布置保证了焊丝的强制接触。这确保了在所有条件和磨损条件下,均匀和恒定的电流过渡到导线电极。
气嘴的直接水冷却降低了焊缝飞溅的附着力。冷却水在炬体内通过它自己的通道到达接触管,然后从那里通过喷嘴填料到达气体喷嘴。
Igm火炬交换系统
通过这种火炬交换系统,机器人可以自动装备各种几何形状的火炬。该功能是程序控制的,可以在任何适当和需要的地方应用。使用的火炬可以有不同的长度或特殊的形状,以更好地进入狭窄的区域。
在任何情况下,焊接介质通过机器人手腕关节的空心轴,提供了大的工作包络和机器人在工件的狭窄空间焊接时的出色性能。交换系统的设计是这样的,即火炬将与软管包解耦。
交换系统的设计目的是将焊枪与软管包的所有介质完全分离。
火炬弹匣固定安装在支架上或柱子上。各种各样的火炬可以交换,因此也可以在串联和单线工艺之间切换。
-




流程——智能机器人
-
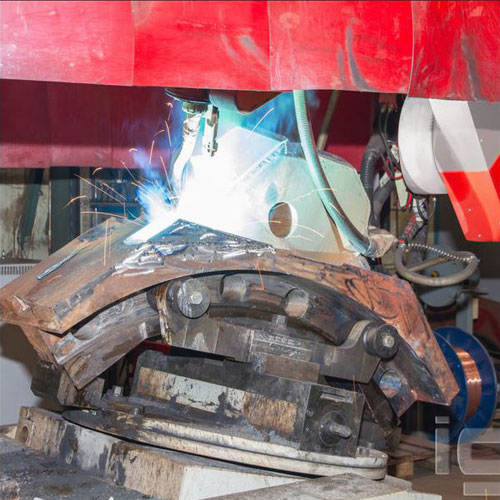
- 焊接和切割工艺
根据材料和薄板厚度的不同,采用以下工艺:
- 气体金属电弧焊(MIG/MAG)
- GTAW -钨极惰性气体焊接(TIG),冷和热丝
- PAW -等离子弧焊或切割
- 搅拌摩擦焊
- Laser-Hybrid焊接
- 电阻点焊
Igm机器人可用于所有非接触式焊接和切割工艺。来自许多知名制造商的电源可以与我们的机器人系统集成,用于焊接和切割应用。产品包括用于MIG/MAG焊接、TIG应用、等离子切割和焊接设备的数字逆变电源,以及用于串联工艺的高容量设备。
刷,磨和处理-使用机器人操作
通过机器人单元的模块化配置和机器人控制序列中各种工具的集成所提供的可能性,可以显著提高吞吐量时间和稳定的过程质量。作为特殊机器的专家,igm承担必要机器的完整设计。
我们将很高兴利用我们40年的经验,在机器人的帮助下实现定制的完整解决方案,而不仅仅是在焊接领域。其他领域的无数应用例子不言自明。
-

Igm斜角机
-
- 用于平板自动焊缝制备的传感器控制斜角系统。稳定的入口结构,包括面向应用的切割头设计,支持所有类型的上部或底部切割与传感器控制在线边缘跟踪。
激光摄像机测量工件位置并沿上边缘跟踪,确保所需的地面高度,并具有+/- 0.5 mm的公差,甚至补偿热变形。该系统处理所需的斜角,这是通过简单地单击和插入几何参数的CAD绘图组件,与专门开发的软件。
传感器支持的系统可以提供与igm ibs oxy和等离子切割机,这是优化的所有机械和控制要求倒角平板金属。这种特殊的特性是由一种平行四边形切割头的发展而成的,切割炬可在其上安装两轴移动。该装置安装在一个稳定的龙门上,在轨道上运行,有一个十字滑道和一个垂直滑道,以采取平行四边形。切割头的特殊设计允许倒角的平板金属与任何,也可改变倒角的直线或曲线切割。
自动测量薄板厚度
在保持指定的地面高度或指定的缝体积的情况下,高精度的缝缝准备不仅需要切割炬沿轮廓的精确跟踪,还需要准确检测板材厚度。为此,igm斜角机可配备自动薄板厚度测量装置。
igm机器人系统的应用

- igm robotersystem在焊接和切割行业的各个领域都有支持的应用。
igm作为大型项目专家的声誉是基于自20世纪80年代以来从重型工程行业获得的稳定的重大合同。事实上,长达100米的地面轨道系统是为迎合这个行业的特殊要求而设计的。比标准尺寸大的部件,例如在桥梁建筑和造船中发现的部件,使用门式焊接装置制造,能够接宽25米、高8米的部件。
机器人系统被用于制造挖掘机、铁路货车和机车、锅炉制造、龙门起重机的建造以及桥梁建造和造船。
-
-

土方与igm焊接机器人
-
- 我们的挖掘机制造装置包括独立的机器或完整的生产线,带有多个焊接单元和自动装卸系统。由于材料厚度极端,焊接要求通常很高,然而,我们的机器人能够通过激光摄像系统处理位置公差、接缝位移和焊接变形,从而实现极其精确的焊接。
终端产品的例子:轮式装载机(铲斗、举升臂、前架、后架)、挖掘机(铲斗、举升臂、臂架、上架、中架、车身)。
-

铁路工业用igm焊接机器人
-
- 当igm机器人焊接时,精确度就发挥了作用:我们的机器人系统为世界各地的轨道车辆焊接许多零件。发动机,框架,转向架,侧墙,屋顶,前墙的货运或客车,火车头,高速列车,郊区列车,地铁和有轨电车是igm机器人正在工作的产品。
特别是对于越来越多使用的铝结构,igm可以通过特别配备的机器人系统进行评分:通过手轴上的“火炬驱动”进给电机进行精确的导丝,自主开发的iCAM激光相机沿焊缝高精度引导焊接火炬,甚至有位置公差,如果需要预热装置,温度传感器,压紧和清洗装置。
终端产品的例子:火车头(主框架,缓冲器,电机箱,转向架),客车(侧壁,地板面板,屋顶,转向架),
-

带有igm焊接机器人的叉车
-
- Igm在实现用于叉车生产的机器人系统方面拥有丰富的经验,在电梯桅杆、格架桅杆、主框架、发动机框架和液压缸的定制焊接解决方案方面发挥着关键作用。
对于液压缸的制造,采用了一个自动系统,该系统由一个带有运输和夹紧装置的封闭工位的机器人组成。对于大型叉式升降机,升降杆的长度可达6米。由于伸缩设计,桅杆有不同的长度和宽度,但在每个部件家族中有相似的结构。因此,为了修改机器人程序,使用了igm离线程序组装系统iPAT,允许在PC上移动和复制程序步骤或步骤组。几何数据可以通过接口从CAD系统中读取。
焊接主框架的机器人系统由一个三轴滑动系统和一个l型机械手组成。这允许工件总是转到最佳的位置,以便访问和焊接。如果液压和油箱集成到框架,密封焊接允许他们同时照顾。紧固件在末端焊接。
对于极端的生产力要求,自动制造线可用于主框架。这些柔性制造系统(FMS)设计用于在多个相同的机器人单元中加工单一工件类型。每个机器人焊接站由自动运输系统连接。该车厢在轨道上移动,并携带一个卫星车厢,可以进入每个站点进行装载、卸载、准备和焊接。工件由特殊机构自动夹紧。
终端产品的例子:液压缸,叉,主框架,舱室框架,次要部件
-

装有igm焊接机器人的起重机
-
- 用于回转塔式起重机的十多种不同的大型部件,例如用于快速安装起重机的回转平台或底盘,回转齿轮轴承,或用于回转平台的回转环支架,都可以由igm焊接机器人焊接。
系统的例子:
随着地板轨道安装的提升柱,他们的旋转悬臂臂,和机械手的轴,回转齿轮轴承系统共有超过12个轴,因此最高的机动性水平。所有的轴都同步运动,因此机器人甚至可以在平面位置焊接非常复杂的零件。
大型部件,如用于回转塔式起重机和快速安装起重机的回转平台,其宽度可达2.5米,长度可达6米。使用的机械手是有史以来最大的之一。它的3.5米旋转臂可以转动重达10吨的工件。一台综合提升机将旋转臂升降两米。最后,用面板来实现焊接所需的自由度。
Igm双机器人系统焊接回转塔吊桁架。在位于中心位置的主轴箱机械手中,长达12米的工件以旋转方式固定,而机器人则在地板轨道上横向移动。两个机器人控制器之间的同步保证了严格遵守焊接顺序。
终端产品的例子:塔式起重机的钢桁架,旋转台,汽车起重机的移动腿和主框架,履带式起重机的格子架
-
用igm焊接机器人进行采矿
-
- 无论是露天开采的采矿机器还是地下开采的设备,我们都为任何机器的制造和维修提供定制的解决方案。用于露天采矿的大型挖掘机以其巨大的体积给人留下了深刻的印象。
用于制造底盘和回转平台的机器人系统在尺寸上也令人印象深刻。负载能力高达20吨的l型机械手和28个综合轴的机器人入口甚至可以掌握这些焊接任务。
-

锅炉和容器用igm焊接机器人
-
- 高质量的锅炉内部覆盖不锈钢钣金,以避免腐蚀。这意味着在制造过程中需要黑/黑和黑/白焊接接头。
两个关节都在机器人单元中使用自动换线系统进行处理。该系统允许在一个夹具内完成锅炉的焊接,无需人工干预。
-

各种应用的Igm焊接机器人
-
- Igm还为不寻常的应用程序提供了适当的解决方案。无论您是想自动化生产铝梯,寻找一种经济的方式焊接锅炉,制造垃圾容器,建造桥梁或缆车,涉及空调技术或想教您的学生,我们都可以为每种应用提供适当类型的设备!
你想要自动堆焊吗?在你的制造过程中,你必须在MIG/MAG和TIG之间切换吗?你必须在一个狭窄的温度窗口内焊接吗?我们在规划机器人小区和选择系统设备时也可以考虑这些规格。
服务
-

客户服务
-
- igm客户和igm机器人:igm服务团队正在将它们焊接在一起
我们的服务部门是我们团队中最强大的力量。因为谁想建造世界上最好的机器人装置,就不能从第二好的团队开始。我们训练有素和高度可靠的服务团队可在您的现场进行安装操作培训,设置和启动系统,并可在需要时迅速赶到现场。
在所有主要工业化国家的基地都以本国语言提供快速反应和售后沟通。您需要系统操作培训吗?请联系:service@igm-group.com
完美的客户服务将我们凝聚在一起
除了安装和启动机器人安装,我们的国际服务团队还接管了工件编程,以加快生产启动。所有主要工业发达国家的服务机构都确保用当地语言提供快捷的售后服务和方便的沟通。如果安装过程中出现问题,我们的工作人员会通过电话及时赶到现场。这确保了客户在项目的所有阶段和项目完成后的最佳支持。
-

培训课程
-
- Igm为客户培训员工。
Wiener Neudorf的培训中心和所有子公司的必要技术,确保通过igm直接提供的基础课程,在编程、操作和维护方面进行密集练习。此外,如果客户要求,还可以在客户现场提供特定系统的操作培训。
如果你不来igm,我们会来找你
如有必要,我们也会到贵公司来。如果需要,我们可以让你们的员工熟悉现场机器人的操作。在我们的许多国际办事处,我们提供全面的基础和高级培训。在几个系统中,您可以测试所获得的技能,并在我们经验丰富的培训师的监督下加深它们。
节选自课程计划
- 接受igm机器人控制器编程的基本训练
- igm机器人系统的维护和修理课程
- 传感器系统应用的特别课程
- 深入培训,特别考虑新软件功能
我们的课程以小组形式进行,最多5人参加。根据要求,个人也可以接受培训。除了标准的基础课程外,课程方案是根据客户和用户的要求编制的,从而为参与者量身定制。
课程在我们各自的地点进行,我们也很乐意提供完整的套餐,包括酒店费用和半食宿。
-

示范和培训中心
-
- 在我们最新设备的培训中心,我们提供广泛的基础和高级培训。在我们经验丰富的教练的监督下,新获得的技术可以在我们的众多训练机器人系统之一上进行练习。在我们的内部机器人系统上,我们可以对原始工件进行客户特定的焊接演示。该机器人能够进行MIG/MAG, TIG和ALU焊接工艺,并配备各种传感器。
















































